一种自适应控制方法及装置与流程
本技术涉及船舶推进控制,具体涉及一种船舶推进控制系统的控制流程及自适应方法。
背景技术:
1、船舶的航速控制一般是通过手柄控制油门调节主机的转速,同时,通过遥控系统对螺距进行控制,以控制船舶航速。
2、目前,螺距控制方法为定转速调螺距或者通过机桨联控曲线进行控制。其中,机桨联控时,螺距和转速同时由一个手柄控制,螺距大小和转速在任何手柄位置点的关系由联控曲线决定。
3、然而,上述控制模式中的控制参数包括转速和螺距,在具体的控制过程中,要么限定一个参数不变要么用一条曲线进行强关联,无法实现高自由度调节,无法适应船舶在航行过程中复杂的工况变化,导致船舶主机效率低,能耗高。
技术实现思路
1、本技术实施例提供一种自适应控制方法,通过阻力系数来确定控制参数以控制船舶推进,解决现有技术中控制参数无法适应船舶在航行过程中复杂的工况变化,导致船舶主机效率低,能耗高的问题;本技术实施例还提供一种自适应控制装置。
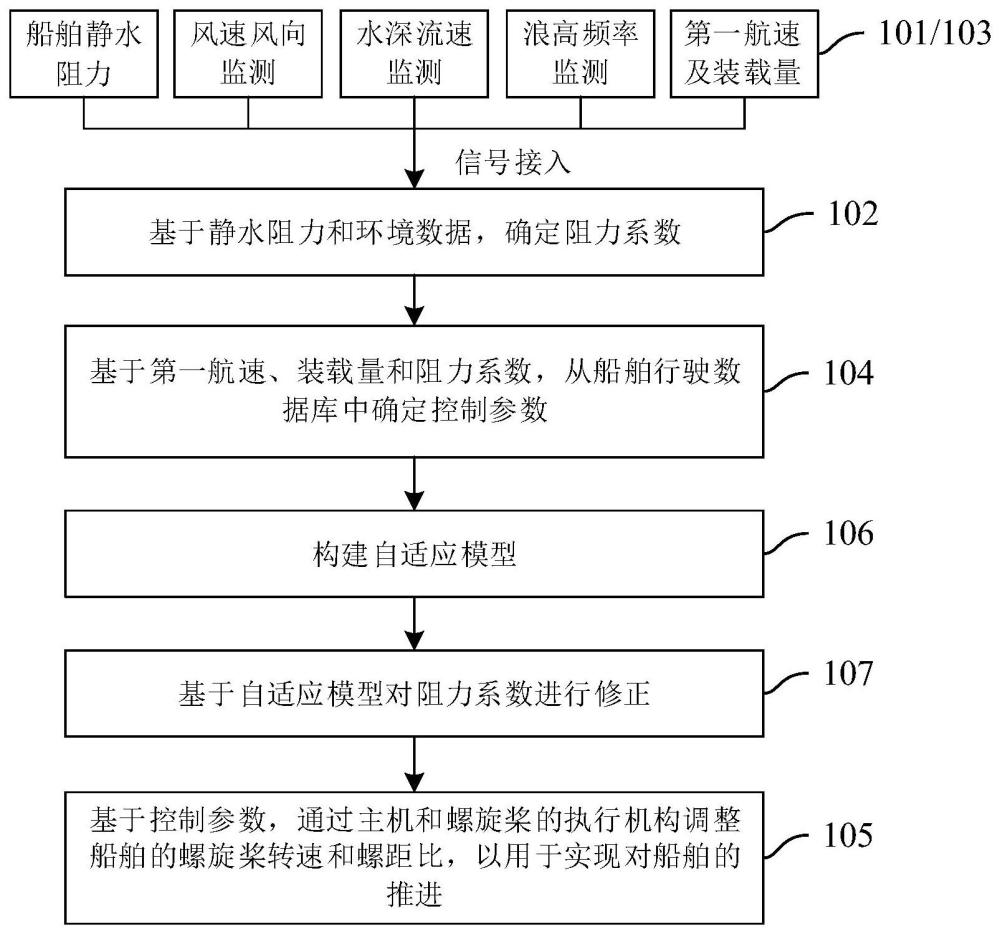
2、本技术实施例提供一种自适应控制方法,用于控制船舶推进控制系统,以实现船舶的推进,所述控制方法包括:
3、确定所述船舶的静水阻力和所述船舶在航行过程中的环境数据;
4、基于所述静水阻力和所述环境数据,确定阻力系数;
5、确定所述船舶的第一航速和装载量;
6、基于所述第一航速、所述装载量和所述阻力系数,从船舶行驶数据库中确定控制参数;
7、基于所述控制参数调整所述船舶的螺旋桨转速和螺距比,以用于实现对所述船舶的推进。
8、在一些实施例中,所述第一航速被配置为表征目标航速,所述第一航速被配置为表征所述船舶期望达到的目标航速,所述第一航速从船舶推进控制系统的控制面板的设定值读取。
9、在一些实施例中,在确定所述控制参数之前,还包括:
10、构建自适应模型;
11、基于所述自适应模型对所述阻力系数进行自适应修正。
12、在一些实施例中,所述自适应模型的输入包括所述第一航速、第三航速、第一阈值、第二阈值和第三阈值;所述第三航速被配置为表征实际航速;所述第一阈值被配置为表征所述第三航速的变化率阈值;所述第二阈值被配置为表征所述船舶推进控制系统的计时阈值;所述第三阈值被配置为表征所述第三航速的偏差阈值;
13、所述自适应模型的输出包括第一命令、第二命令、第一阻力系数和第二阻力系数,所述第一命令被配置为表征保持所述阻力系数的存储记忆的命令;所述第二命令被配置为表征更新所述阻力系数的存储记忆的命令;所述第一阻力系数被配置为表征所述阻力系数的初始值;所述第二阻力系数被配置为表征修正后的所述阻力系数。
14、在一些实施例中,基于所述自适应模型对所述阻力系数进行修正,包括:
15、基于所述第一航速对所述阻力系数进行初始化,确定所述第一阻力系数;
16、对所述第一阻力系数进行更新,确定所述第二阻力系数。
17、在一些实施例中,对所述阻力系数进行初始化,确定所述第一阻力系数,包括:
18、确定所述第一航速相邻两个采样点的差值;
19、当所述差值等于零时,输出所述阻力系数,并将所述阻力系数确定为所述第一阻力系数,并保持所述第一阻力系数不变;
20、当所述差值不等于零时,进行一次所述阻力系数的估算,重新确定所述第一阻力系数,并执行所述第二命令,所述第二阻力系数初始化为所述第一阻力系数。
21、在一些实施例中,对所述第一阻力系数进行更新,确定所述第二阻力系数,包括:
22、确定所述第三航速的变化率;
23、基于所述变化率和所述第一阈值,确定判断参数;
24、基于所述判断参数开始计时;
25、当所述计时的时长大于或者等于所述第二阈值时,基于所述第一航速和所述第三航速,确定航速偏差;
26、当所述航速偏差大于所述第三阈值时,确定所述阻力系数的修正值;
27、基于所述修正值和所述第一阻力系数,确定所述第二阻力系数,并执行所述第二命令。
28、在一些实施例中,基于所述静水阻力和所述环境数据,确定阻力系数,包括:
29、基于所述环境数据确定风阻力和波浪阻力;
30、基于所述风阻力、所述波浪阻力和所述静水阻力,确定总阻力;
31、基于所述总阻力和所述静水阻力,确定所述阻力系数。
32、在一些实施例中,所述风阻力基于以下公式确定:
33、
34、其中,rx为所述风阻力,ρa为空气密度,vr为相对风速,avt为船舶横向受风面积,cx为纵向风力系数。
35、在一些实施例中,所述波浪阻力基于以下步骤确定:
36、基于以下公式进行速度惩罚:
37、
38、其中,bn为有义波高的有效蒲福级数,hs为有义波高,δv/v为速度惩罚,c为无量纲常数,设定为0.7,为船舶排水体积,ve为速度惩罚后的第二航速,μ为方向修正系数,v0为所述第一航速;
39、将所述第二航速带入预设的静水阻力数据库中进行插值,并基于以下公式确定所述波浪阻力:
40、rw=f(ve)-f(v0),
41、其中,rw为所述波浪阻力。
42、在一些实施例中,所述总阻力基于以下公式确定:
43、rt(t)=r0(t)+rx(t)+rw(t),
44、其中,rt为所述总阻力,r0为所述静水阻力,rx为所述风阻力,rw为所述波浪阻力,t为时刻。
45、在一些实施例中,所述阻力系数基于以下公式确定:
46、
47、其中,λ0为所述阻力系数,rt为所述总阻力,r0为所述静水阻力,t为时刻。
48、在一些实施例中,所述船舶行驶数据库包括螺旋桨转速数据库和螺距比数据库,其中:
49、所述螺旋桨转速数据库包括所述第一航速、所述装载量和所述阻力系数对应的最佳螺旋桨转速,所述螺距比数据库包括所述第一航速、所述装载量和所述阻力系数对应的最佳螺距比;其中,所述最佳螺旋桨转速和所述最佳螺距比确定为所述控制参数。
50、在一些实施例中,基于所述控制参数,通过主机和所述螺旋桨的执行机构调整所述船舶的螺旋桨转速和螺距比,以用于实现对所述船舶的推进。
51、相应的,本技术实施例还提供一种自适应控制装置,用于控制船舶推进控制系统,以实现船舶的推进,所述控制装置包括:
52、第一确定模块,所述第一确定模块被配置为确定所述船舶的静水阻力和所述船舶在航行过程中的环境数据;
53、第二确定模块,所述第二确定模块被配置为基于所述静水阻力和所述环境数据,确定阻力系数;
54、第三确定模块,所述第三确定模块被配置为确定所述船舶的第一航速和装载量;
55、第四确定模块,所述第四确定模块被配置为基于所述第一航速、所述装载量和所述阻力系数,从船舶行驶数据库中确定控制参数;并
56、控制模块,所述控制模块被配置为基于所述控制参数调整所述船舶的螺旋桨转速和螺距比,以用于实现对所述船舶的推进。
57、在一些实施例中,还包括自适应模块,所述自适应模块被配置为在确定所述控制参数之前,执行以下步骤:
58、构建自适应模型;
59、基于所述自适应模型对所述阻力系数进行自适应修正。
60、与现有技术相比,本技术实施例的一种自适应控制方法,用于控制船舶推进控制系统,以实现船舶的推进,控制方法包括:确定船舶的静水阻力和船舶在航行过程中的环境数据;基于静水阻力和环境数据,确定阻力系数;确定船舶的第一航速和装载量;基于第一航速、装载量和阻力系数,从船舶行驶数据库中确定控制参数;基于控制参数调整船舶的螺旋桨转速和螺距比,以用于实现对船舶的推进。如此,通过阻力系数来确定控制参数以控制船舶推进,以适应船舶在航行过程中复杂的工况变化,提升船舶主机效率,降低能耗。
61、可以理解的是,与现有技术相比,本技术实施例提供的自适应控制装置具有上述自适应控制方法的所有技术特征以及有益效果,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!