智能网联车辆队列汇入-汇出分层控制方法
本发明属于智联网汽车领域,涉及一种智能网联车辆队列汇入-汇出分层控制方法。
背景技术:
1、基于v2x通信的车辆队列控制被认为是提高交通流动性、安全性和节能性的最佳选择。因为这些显而易见的好处,世界各国在过去几十年进行了大量与车辆队列控制有关的工作。车辆作为陆上交通运输中及其重要的一部分,其运输效率和安全性如何提高也越来越多地被研究。智能网联车辆队列控制由于融合了先进的自动化技术和高效的通信技术,具有极大的节能、安全、高效的潜力,成为全球汽车产业的研究发展方向。
2、目前,现有的车辆队列控制技术包括公开的专利研究重点由如何维持固定队列稳定性向着如何实现车辆安全动态汇入-汇出队列发展。如公开号为cn116682252a,名称为:一种智能网联车辆自适应汇入车辆队列控制方法,该专利主要提供一种智能网联车辆自适应汇入车辆队列控制方法,考虑车辆队列和汇入车辆的速度、位置关系,以及车辆舒适性要求,对所有候选汇入位置进行评估,以实现汇入车辆自适应选择最优汇入位置,然而,其忽略了避碰安全间距与实际车辆的底层动力学特性,难以刻画出真实驾驶场景下的队列控制。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种智能网联车辆队列汇入-汇出分层控制方法,其考虑车辆非线性动力学影响,设计包含集中式决策层和分布式控制层在内的汇入-汇出分层协同控制方法,决策层与控制层相互配合,确保了整个协同控制过程的安全性、稳定性和高效性。
2、为达到上述目的,本发明提供如下技术方案:
3、智能网联车辆队列汇入-汇出分层控制方法,该方法包括以下步骤:
4、s1:考虑车辆传动系统、轮胎以及制动系统,建立车辆动力学模型;
5、s2:设计位于领航车辆的集中决策层,领航车与队列中每个车辆和机动车辆都建立有通信连接,每次决策层计算的结果通过v2v通信来发送给队列中的协同车辆或者汇入-汇出车辆,以此完成汇入-汇出的决策沟通,具体包括汇入-汇出的请求评估、汇入位置判断以及队列安全间距判断;
6、s3:设计位于每辆车上的分布式控制层,控制层会根据决策层输出的指令来控制车辆完成相应的具体动作,具体包括汇入-汇出间距控制、轨迹规划以及轨迹跟踪控制;
7、s4:搭建仿真环境对控制方法进行有效性验证,通过建立联合仿真环境、引入传感器系统以及通信系统完成对分层控制方法有效性验证。
8、进一步的,所述s1,考虑车辆传动系统、轮胎以及制动系统,建立车辆动力学模型如下:
9、
10、式中,fxr(t)表示后轮纵向轮胎力;fxf(t)表示前轮纵向轮胎力;ωr(t)表示后轮转速;ωf(t)表示前轮转速;ωe(t)表示发动机转速;ωp(t)表示液力变矩器转速;tb(t)表示制动力矩;te(t)表示驱动力矩;pbr(t)表示制动压力;θth(t)表示节气门开度;ftr(*)表示液力变矩扭矩特性;ftki(*)表示液力变矩容量特性;map(*)表示发动机扭矩特性;lf表示前轴到质心距离;lr表示后轴到质心距离;vx(t)表示纵向速度;rw表示车轮半径;kb表示制动压力系数;cd表示空气阻力系数;vlow表示车轮纵向速度常数;ig表示变速器传动比;i0表示减速器传动比;μa表示滚动阻力系数;ρa表示空气密度;a表示迎风面积;b表示刚度因子;c表示形状因子;d表示峰值因子;e表示曲率因子;jr表示后轮转动惯量;je表示发动机转动惯量;jf表示前轮转动惯量;vy表示车辆横向速度;m表示车辆质量;cf和cr分别表示车辆前、后轮等效侧偏刚度;ω表示车辆横摆角速度;β表示质心侧偏角;ψ表示前轮转角;iz表示车辆绕z轴的转动惯量。
11、进一步的,所述s2具体为:
12、s21:请求评估:负责根据队列自身情况来对汇入-汇出请求进行分析,判断是否接受此次请求
13、1)外部车辆请求汇入队列:领航车辆需要根据合并后的队列长度和队列当前运行状态来进行汇入请求的评估;具体判断步骤如下:
14、a)汇入车辆tm发送汇入请求给队列领航车辆t0,触发队列汇入策略,领航车辆t0与车辆tm建立通信连接;
15、b)进行队列长度判断;根据当前队列长度la计算合并后的队列长度是否大于队列设定最大长度lmax;大于则直接拒绝此次请求,小于等于则进行下一步骤的判定,如下所示;
16、la+1≤lmax
17、c)进行队列稳定性判断;根据下式进行队列串稳定性判别,当队列处于串稳定状态时,允许进行外部车辆的汇入,否则拒绝此次汇入请求;
18、
19、式中,j为虚数单位;ω为激励频率;|g(jω)|为车辆队列系统传递函数幅值;
20、d)汇入车辆tm加入队列自组织通信网络,进行下一步汇入位置判断;
21、2)内部车辆请求汇出队列:在实际行驶过程中内部车辆的汇出往往是因为目的地即将到达或目的地变更,需要驶入其他车道来达到此目的;因此领航车辆会默认同意汇出申请;具体判断步骤如下:
22、a)汇出车辆ts发送汇出请求给队列领航车辆t0,触发队列汇出策略;
23、b)领航车辆t0同意汇出请求,进行下一步队列安全间距的判断;
24、3)领航车辆同意外部车辆的汇入请求后,将进行汇入位置的判断再进行队列安全间距的判断;若同意内部车辆的汇出请求后,则直接进行队列安全间距判断;
25、s22:领航车辆t0允许汇入车辆tm的汇入请求后,需要进行汇入位置的决策;
26、1)汇入位置通常分为队尾汇入和队中汇入,汇入位置判断策略如下:
27、a)若车辆tm当前位置位于队列尾车位置xn之后,判定策略为队尾汇入;
28、b)若车辆tm当前位置位于队列头车到尾车之间,判定策略为队中汇入;
29、2)计算汇入位置pm:
30、
31、式中,pm为车辆tm的汇入位置;xi为队列中车辆i的纵向位置;
32、3)汇入位置判断完成后,领航车辆会将汇入位置发送给汇入车辆tm;然后汇入车辆tm会在纵向分层控制器的作用下,达到指定的汇入起始点并等待领航车进行队列安全间距的判断;为了方便汇入后车辆间距的调整,缩短队列恢复稳定行驶的时间,将汇入起始点与车辆汇入后的期望位置设定为相同的值;计算如下:
33、
34、式中,xmp为汇入点前车的位置;di,des为相邻车辆间的期望间距;l为车长;
35、s23:安全间距判断:设计队列安全间距判断模型,在决策层进行队列安全间距的计算并发送计算结果给控制层,控制层通过队列纵向分层控制器完成汇入-汇出位置的间距调整,使其符合汇入-汇出的安全需求;
36、1)汇入安全间距判断
37、a)汇入起始点与前车位置xmp(t)的最小安全间距:汇入过程中车辆tm与前车tmp可能发生碰撞;根据车辆tm和前车tmp的相对位置关系,得到如下所示的避碰条件;
38、
39、式中,xm(t)为车辆tm的纵向位移;w为车辆tm的车身宽度;为车辆速度方向与车道中心线的夹角;xmp(t)为车辆tmp的纵向位移;
40、进一步定义smin(tm,tmp)为车辆tm与车辆tmp不发生碰撞的最小安全间距,表示如下:
41、
42、式中,am(t)为车辆tm的纵向加速度;amp(t)为车辆tmp的纵向加速度;vm(0)为汇入初始时刻车辆tm的纵向速度;vmp(0)为汇入初始时刻车辆tmp的纵向速度;sp(0)为车辆tm与车辆tmp的初始间距;t∈[tms,tmf]为时间域;tms和tmf分别为汇入开始时刻和汇入结束时刻;
43、b)汇入起始点与后车位置xml(t)的最小安全间距:汇入过程中车辆tm与后车tml可能发生碰撞;根据车辆tm和后车tml的相对位置关系,得到避碰条件如下:
44、
45、式中,xml(t)为车辆tml的纵向位置;
46、进一步,车辆tm与后车tml不发生碰撞的最小安全间距如下:
47、
48、式中,smin(tml,tm)为最小安全间距;aml(t)为车辆tml的纵向加速度;vml(0)为汇入初始时刻车辆tml的纵向速度;sl(0)为车辆tm与车辆tml的初始间距;
49、汇入最小安全间距dm(t)如下:
50、dm(t)=smin(tm,tmp)+smin(tml,tm)
51、2)汇出安全间距判断
52、汇出起始点与前车位置xsp(t)的最小安全间距:根据车辆tm和前车tsp的相对位置关系,得到车辆之间不发生碰撞的条件如下:
53、
54、式中,as(t)为车辆ts的纵向加速度;asp(t)为车辆tsp的纵向加速度;vs(0)为汇出初始时刻车辆ts的纵向速度;vsp(0)为汇出初始时刻车辆tsp的纵向速度;sr(0)为车辆ts与车辆tsp的初始间距;t∈[tss,tsf]为时间域;tss和tsf分别为汇出开始时刻和汇出结束时刻;
55、汇出时车辆ts的速度设定为大于等于队列速度,此时车辆ts不可能与后车tsl发生碰撞;汇出最小安全间距ds(t)如下:
56、ds(t)=smin(ts,tsp)
57、s24:得到汇入-汇出最小安全间距,决策层信息发送给相应车辆:
58、1)得到汇入最小安全间距dm(t)后,决策层会将计算结果发送给后车tml;tml上的控制层会根据此结果,在队列纵向分层控制器的作用下完成指定动作;
59、2)汇出最小安全间距ds(t)后,决策层会将计算结果发送给汇出车辆ts,ts上的控制层会根据此结果,在队列纵向分层控制器的作用下完成指定动作。
60、进一步的,所述s3具体为:
61、s31:在决策层中计算得到了汇入-汇出时的队列安全间距后,控制层需要进行安全间距的控制;具体步骤如下:
62、1)汇入时车辆tmp和车辆tml的间距策略如下式:
63、dml,des(t)=max(dm(t),αvml(t)+dmin)
64、式中,dml,des(t)为车辆tmp和车辆tml之间的期望间距;max(*)为最大值函数;αvml(t)+dmin为车辆tml在cth策略下的期望间距;
65、2)汇出时车辆ts和车辆tsp之间的间距策略如下式:
66、ds,des(t)=max(ds(t),αvs(t)+dmin)
67、式中,ds,des(t)为车辆ts和车辆tsp之间的期望间距;αvs(t)+dmin为车辆ts在cth策略下的期望间距;
68、3)队列中的车辆都采用如下所示的分布式纵向分层控制器进行控制:
69、
70、式中,uf,i(t)为校正后的期望加速度;k1、k2、k3分别为pid控制器的比例、积分、微分增益系数;δai(t)为期望加速度与实际加速度之间的误差,δai(t)=ui(t)-ai(t);θth,i(t)和pbr,i(t)表示下层控制器输出节气门开度和制动压力;map-1(*)表示逆发动机扭矩特性函数;ωe,i(t)为第i辆车的发动机转速;si(t)表示滑模面;c表示滑模面增益;为车辆间的速度误差;k、λ、b、γi和为常数增益;ei(t)为相邻车辆的间距误差;di(t)为相邻车辆的实际间距;l为车辆车长;di,des(t)为i车与i-1车之间的期望间距;h为车头时距;dmin为车辆静止时两车辆间的车间距;
71、s32:汇入-汇出队列轨迹规划:根据汇入-汇出初始条件和结束条件,利用三次多项式曲线得到汇入-汇出轨迹的表达式如下:
72、
73、式中,xm和xs分别为汇入和汇出过程车辆的纵向位置;ym和ys分别为汇入与汇出过程车辆的横向位置;和分别为汇入的最终纵向和横向位置;和分别为汇出的最终纵向和横向位置;
74、s33:汇入-汇出队列轨迹优化:
75、1)汇入轨迹优化,
76、a)建立基于汇入效率和乘客舒适度的汇入轨迹代价函数,以此来得到最优的汇入最终纵向位置代价函数表示如下:
77、
78、b)汇出轨迹优化的代价函数j表示如下:
79、
80、通过最小化代价函数j的方式来找到最优的汇入轨迹,得到最优汇入终点纵向位置如下式所示:
81、
82、2)除了考虑汇入效率和乘客舒适度之外,在实际汇入过程中汇入车辆应避免与汇入位置前后车辆的碰撞风险;汇入车辆tm和前车tmp的安全间距模型表示如下:
83、
84、式中,τ为滞后车辆的反应时间;和分别为汇入车辆tm和前车tmp的初始纵向速度;bm和bmp分别为汇入车辆tm和前车tmp的最大减速度;
85、汇入车辆tm和后车tml的安全间距模型表示如下:
86、
87、式中,为后车tml的初始纵向速度;bml为后车tml的最大减速度;
88、将汇入起始纵向位置定义为0,得到汇入最终纵向位置的避碰范围下所示:
89、
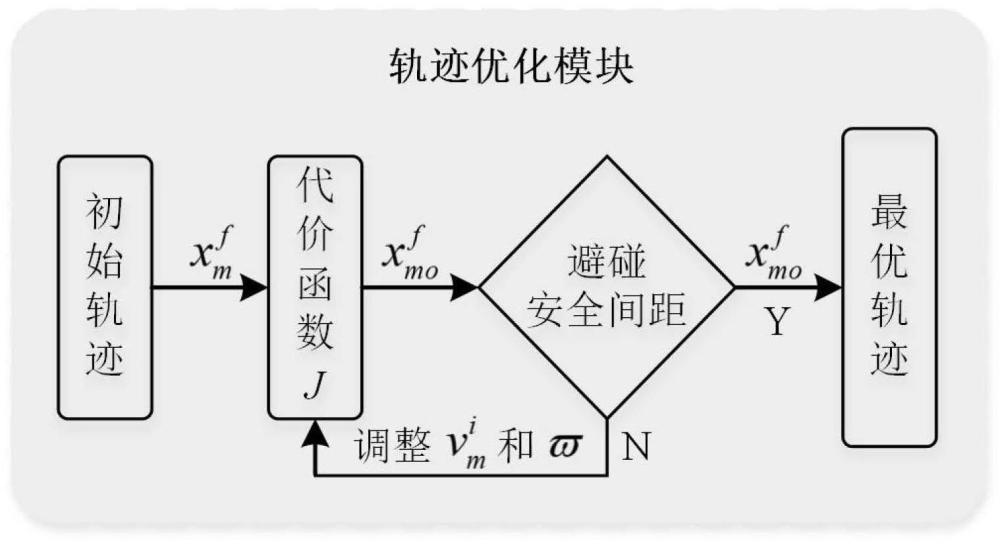
90、3)结合考虑汇入效率和乘客舒适度的代价函数模块和考虑碰撞风险的安全间距模块最终得到汇入轨迹优化模块,最小化优化函数j后得到的最优汇入终点位置可能并不满足避碰安全间距的要求;因此为了避免碰撞的发生,应落在避碰安全间距范围内;通过调整汇入起始速度和权重来得到,具体调整逻辑如下:
91、当时,在避碰安全间距内;此时无需进行调整,得到最优汇入轨迹;
92、当时,即超出避碰安全间距上界;首先进行汇入起始速度的调整,通过降低来达到要求;如果采用最大减速度依然满足不了要求,那么进一步通过调整权重来达到要求;
93、当时,即超出避碰安全间距下界;首先进行汇入起始速度的调整,通过增大来达到要求;如果采用最大加速度依然满足不了要求,那么进一步通过调整权重来达到要求;
94、如果通过和的调整,最优汇入终点位置仍然不能满足避碰安全间距的要求,则表示当前队列环境不适合进行汇入;汇入车辆将重新发送汇入请求,并等待领航车辆的回应;
95、s34:轨迹跟踪控制:根据s1中车辆模型,设计控制器实现汇入-汇出,表示如下:
96、
97、式中,ω(t)表示车辆实际横摆角速度,ωdes表示车辆理想横摆角速度;s(t)表示滑模面;c表示滑模面系数,ψc为车辆的前轮转角;k、λ、b、γi和为常数增益。
98、进一步的,所述s4中,通过采用仿真环境进行联合仿真测试;其中,其中prescan主要用于交通场景构建、v2x传感器配置以及进行三维仿真动画显示,trcuksim用于生成车辆动力学模型,matlab/simulink用于控制算法的加载和仿真数据的提取。
99、进一步的,所述仿真环境包括matlab和simulink+prescan+trucksim。
100、本发明的有益效果在于:本发明提出了一种包含集中式决策层和分布式控制层在内的汇入-汇出分层协同控制方法。决策层位于领航车辆上,在整个协同过程中负责关键信息的决策并输出相应信号给控制层。具体包括请求评估、汇入位置判断以及队列安全间距计算。控制层考虑车辆非线性车辆动力学模型影响,根据决策层输出的结果来控制队列成员车辆和机动车辆完成相应的协同动作。具体包括队列纵向间距控制、汇入-汇出轨迹规划、轨迹优化和轨迹跟踪控制。决策层与控制层相互配合,确保了整个协同控制过程的安全性、稳定性和高效性。
101、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!