一种无人机编队队形控制方法与流程
本发明属于无人机,尤其涉及一种无人机编队队形控制方法。
背景技术:
1、无人机技术经过几十年的发展已经相对成熟,在很多领域发挥着重要作用,为提高无人机的战斗力,应对更复杂的作战环境,无人机协同编队飞行越来越受到国内外的重视,通过无人机协同编队作战,可以获取更多战场环境信息,提高作战效能。编队队形控制是无人机编队协同作战的关键技术之一,通过队形控制设计能够节省无人机消耗的能量,保证飞行安全,增加航程。
2、一般而言,无人机编队根据无人机之间的距离远近,分为松编队和紧编队,紧编队的队形控制需要考虑机间气动耦合的影响,而松编队的机间距离较远,进行编队队形控制时不考虑气动因素影响。编队队形控制包括编队队形设计和队形变换,队形设计需要根据编队作战任务和环境确定队形结构,队形变换通过建立队形重构规则为无人机规划从当前队形到新队形的飞行路径。编队队形控制的关键问题包括无人机间的安全距离设计,任务需求下的队形变换,紧编队的气动耦合问题,队形形成与变换过程控制。目前,机间距离较大的松编队依然是工程和实际作战的首选。
技术实现思路
1、本发明的目的在于提供了一种无人机编队队形控制方法,以实现无人机编队队形构建和变换重构,从而增强无人机编队的协同作战能力和任务完成率。
2、实现上述目的所采用的技术方案如下:
3、一种无人机编队队形控制方法,其特征在于,包括:
4、设备准备:根据目标队形确定参与编队的无人机数量,并将所有参与编队的无人机置于地面等待;
5、设定小队编队原则:根据无人机数量进行无人机单位小队组建,对每个单位小队中的每台无人机进行角色分配,并根据角色赋予每台无人机唯一的编号;
6、坐标定义:建立编队坐标系,用于统一描述无人机在编队中的相对位置;
7、设定组合编队原则:基于编队坐标系,针对目标队形所需的若干个单位小队,设定多队多机的位置分配和飞行控制原则;
8、设定队形变换原则:在组合编队原则的基础上设定编队队形重构原则,即沿用多队多机的位置分配和飞行控制原则,在保证无人机间安全距离的基础上进行不同队形之间的切换;
9、起飞前准备:融合小队编队原则、组合编队原则和队形变换原则,根据目标队形,分别对所有参与编队的无人机进行航线规划和装订,装订的航线包括正常航线、集结航线和解散航线;
10、编队控制:在无人机满足起飞条件的情况下,通过地面站发送指令,基于装订的航线,对参与编队的无人机进行包括正常飞行、编队飞行和着陆飞行在内的编队飞行控制。
11、优选的,所述设定小队编队原则的过程中,无人机角色包括长机和僚机,且每个单位小队中包括一台长机和若干台僚机。
12、优选的,所述设定小队编队原则的过程中,将赋予无人机发唯一编号记为i_j,表示第i个单位小队中的第j台无人机;当j=1时,表示该台无人机为长机,当j>1时,表示该台无人机为僚机。
13、优选的,所述设定小队编队原则的过程中,还包括最小单位小队的确定,即令q表示参与编队的无人机数量,当为整数时,将q台无人机划分为个由一台长机和一台僚机构成的最小单位小队;当为非整数时,将q台无人机组建为个由一台长机和一台僚机构成的最小单位小队,以及由一台长机构成的最小单位小队。
14、优选的,所述坐标定义的过程中,编队坐标系是为平面下的长机坐标系,即以长机质心为坐标原点,指向机头方向为y轴正方向,垂直于y轴且指向长机机体右侧的方向为x轴正方向。
15、优选的,所述设定组合编队原则的过程中,多队多机的位置分配和飞行控制原则具体为:在参与编队的所有单位小队中,选出一个单位小队中的长机作为主长机,其余单位小队中的长机为副长机;所有长机分别负责所在单位小队中僚机在自身编队坐标系下的位置分配,主长机负责所有副长机在自身编队坐标系下的位置分配。
16、优选的,所述设定队形变换原则的过程中,编队队形重构原则是通过地面站向主长机发送队形变换指令,主长机根据当前队形与待切换队形的无人机分布区别,确定需要变换位置的无人机编号,根据需要变换位置的无人机编号控制相应无人机位置变换,具体的:
17、若需要变换位置的无人机为主长机所在单位小队中的僚机,则通过主长机对该无人机进行新位置分配;
18、若需要变换位置的无人机为副长机,则通过主长机对该无人机进行新位置分配;
19、若需要变换位置的无人机为副长机所在单位小队中的僚机,则通过主长机根据待切换队形向该无人机所在单位小队中的副长机发送位置变换指令,由该副长机对该无人机进行新位置分配。
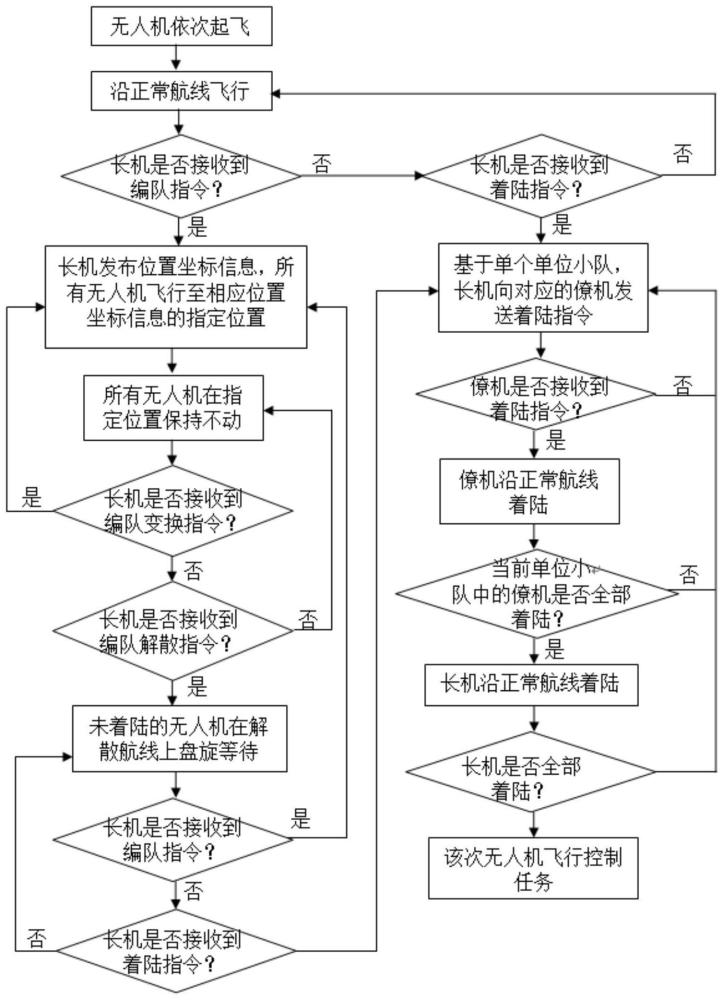
20、优选的,所述编队控制包括以下步骤:
21、s1,控制所有无人机依次起飞;
22、s2,无人机执行单机飞行任务,以沿正常航线飞行;
23、s3,判断长机是否接收到编队指令;若否,则进入步骤s4,若是则进入步骤s5;
24、s4,判断长机是否接收到着陆指令;若是,则直接进入步骤s12,若否,则回到步骤s2;
25、s5,主长机根据目标队形,向自身所在单位小队中的僚机和/或其余单位小队中的副长机发送位置坐标信息,副长机向自身所在单位小队中的僚机发送位置坐标信息,使得所有副长机和僚机沿集结航线飞行至相应位置坐标信息的指定位置;
26、s6,利用编队保持控制器控制所有无人机在指定位置保持不动;
27、s7,判断长机是否接收到编队变换指令;若是,则根据待变换的目标队形回到步骤s5,若否,则进入步骤s8;
28、s8,判断长机是否接收到编队解散指令;若是,进入步骤s9;若否,则回到步骤s6;
29、s9,未着陆的无人机在解散航线上盘旋等待;
30、s10,判断未着陆的长机是否接收到是否接收到编队指令;若是,则回到步骤s5,若否,则进入步骤s11;
31、s11,判断长机是否接收到着陆指令;若是,则进入步骤s12,若否,则回到步骤s9;
32、s12,基于单个单位小队,长机向对应的僚机发送着陆指令;
33、s13,僚机判断是否接收到着陆指令;若是,则进入步骤s14,若否,则回到步骤s12;
34、s14,接收到着陆指令的僚机调用着陆程序,沿正常航线着陆;
35、s15,当前单位小队中的僚机是否全部着陆;若是,则进入步骤s16,若否,则回到步骤s12;
36、s16,长机调用着陆程序,沿正常航线着陆;
37、s17,判断长机是否全部着陆;若否,则回到步骤s12,若否,则该次无人机飞行控制任务。
38、本发明的有益效果:
39、本技术方案提出的一种无人机编队队形控制方法,通过建立编队坐标系以统一描述所有无人机在编队中的相对位置;基于小队编队原则建立单位小队,对多种基本队形建立标准化操作奠定基础,即将单位小队作为空间基,便于以此为基础构建多架无人机的编队队形;在组合编队原则中,通过将单位小队的队形进行组合,实现多队多机的编队队形的位置分配及形成过程设计,确保编队的合理性和便操作性,对后期的队形变换具有重要意义;进一步的,本技术方案通过在小队编队原则和组合编队原则的基础上建立队形变换原则,在无人机编队发生突发情况时对现有编队队形进行重构,通过统一标准的变换步骤变换为不同队形,在保证安全距离的基础上,保证编队的抗干扰能力和任务完成率。综上所述,本技术方案提出的无人机编队队形控制方法为适应不同的场景和不同数量的无人机编队,设计了多种队形,并规定了对队形形成过程的详细步骤,同时对不同队形变换的流程进行标准化管理,限定了无人机间的安全距离,从而保障了无人机的安全性,满足了编队的不同任务需求。
- 还没有人留言评论。精彩留言会获得点赞!