一种设备控制方法、装置、电子设备及存储介质与流程
本发明涉及自动控制,尤其涉及一种设备控制方法、装置、电子设备及存储介质。
背景技术:
1、随着能源结构的转变以及科学技术的进步,燃气热水器得到迅速普及,已经成为了日常生活的必备设备之一。燃气热水器只有实现了稳定控制才能在日常使用中给用户较好的用水体验。
2、燃气热水器的温度控制是控制环节比较重要的一个环节,对于燃气热水器的温度控制方法常采用基于反馈式控制算法,计算出水温度和设定温度的偏差,根据偏差通过比例积分微分算法进行调节。当水流量、进水温度等因素发生变化时,虽然燃气热水器内部用于实现热交换的水箱留出了一定的缓冲空间,但是反馈式控制算法无法提前做出调整,只有在出水温度发生变化时,反馈式控制算法才会做出响应的动作,这种滞后的控制方法在外界因素发生较大幅度的波动时会带来极其糟糕的用水体验。
3、对于现有技术的分析,存在响应速度慢、控制滞后的问题。
技术实现思路
1、本发明提供了一种设备控制方法、装置、电子设备及存储介质,以解决现有的自动控制方法存在的控制滞后的问题和控制结果不准确、响应速度慢的问题。
2、根据本发明的一方面,提供了一种设备控制方法,包括:
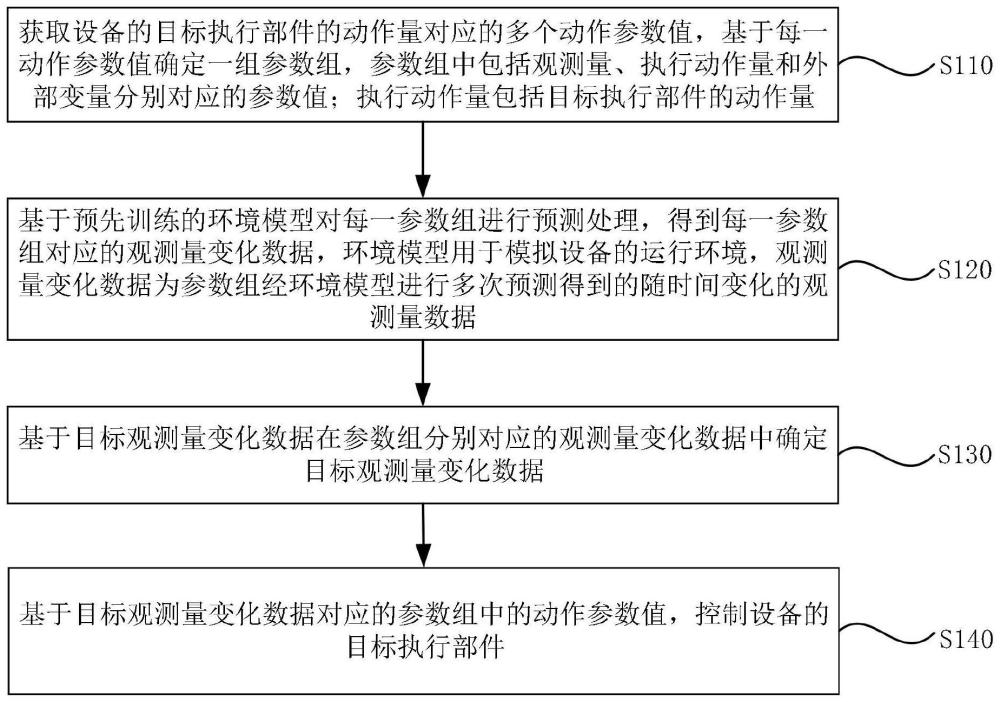
3、获取设备的目标执行部件的动作量对应的多个动作参数值,基于每一动作参数值确定一组参数组,参数组中包括观测量、执行动作量和外部变量分别对应的参数值;执行动作量包括目标执行部件的动作量;
4、基于预先训练的环境模型对每一参数组进行预测处理,得到每一参数组对应的观测量变化数据,环境模型用于模拟设备的运行环境,观测量变化数据为参数组经环境模型进行多次预测得到的随时间变化的观测量数据;
5、基于目标观测量变化数据在参数组分别对应的观测量变化数据中确定目标观测量变化数据;
6、基于目标观测量变化数据对应的参数组中的动作参数值,控制设备的目标执行部件。
7、可选的,获取设备的目标执行部件的动作量对应的多个动作参数值,基于每一动作参数值确定一组参数组,包括:
8、通过预设采样方式从目标执行部件的动作量的标准取值范围中采样得到多个动作参数值;
9、确定每一动作参数值对应的动作量参数、外部变量参数和观测量参数,得到每一动作参数值对应的一组参数组。
10、可选的,确定每一动作参数值对应的动作量参数、外部变量参数和观测量参数,得到每一动作参数值对应的一组参数组,包括:
11、基于目标执行部件的动作量与其他动作量之间的对应关系和目标执行部件的动作量对应的动作量参数确定其他动作量的动作量参数;
12、获取当前时刻对应的历史外部变量参数和历史观测量参数,基于各动作量对应的动作量参数、当前时刻对应的历史外部变量参数和历史观测量参数构成一组参数组;
13、其中,设备为温度控制设备,目标执行部件包括比例阀;目标执行部件的动作量包括比例阀开度;外部变量包括设备的进水温度、进水流量、分段阀信息、风堵等级;观测量包括设备的出水温度。
14、可选的,基于预先训练的环境模型对每一参数组进行预测处理,得到每一参数组对应的观测量变化数据,包括:
15、对于任一参数组,将参数组输入至预先训练的环境模型中,得到第一预测值,第一预测值为第一预测时刻的观测量数据;
16、基于第一预测值和参数组中的执行动作参数和外部变量参数形成第一预测时刻的参数组;
17、将第一预测时刻的参数组输入至预先训练的环境模型,得到第二预测值,并基于第二预测值得到下一参数组,直到得到多个预测时刻的观测量数据;
18、基于多个预测时刻分别对应的观测量数据得到参数组对应的观测量变化数据。
19、可选的,基于目标观测量变化数据在参数组分别对应的观测量变化数据中确定目标观测量变化数据,包括:
20、通过预测模型控制算法确定每一参数组对应的观测量变化数据与目标观测量变化数据的偏差数据;
21、将最小偏差数据对应的观测量变化数据确定为目标观测量变化数据。
22、可选的,环境模型的训练过程,包括:
23、构建待训练的环境模型,其中,待训练的环境模型为神经网络模型;
24、从历史数据中选取一历史观测量作为初始观测量,并获取初始观测值对应的时间段内的历史动作量参数和历史外部变量参数,将初始观测量、历史动作量参数和历史外部变量参数作形成一训练参数组;
25、将训练参数组输入至待训练的环境模型,得到待训练的环境模型输出预测结果,作为第一时刻的预测结果;
26、将第一时刻的预测结果作为下一时刻的观测量,获取下一时刻的观测量对应的时间段内的历史执行动作参数和历史外部变量参数,得到下一训练参数组,将下一训练参数输入至待训练的环境模型,得到第二时刻的预测结果,直到得到满足预设预测步长的预测观测量变化数据;
27、将预测观测量变化数据输入至预设判别网络,基于预设判别网络的判别结果确定奖励值,基于奖励值通过预设强化学习算法调整环境模型的参数,得到训练好的环境模型。
28、可选的,预设判别网络的训练过程,包括:
29、获取预测观测量变化数据和预测观测量变化数据对应时间范围内的实际观测量变化数据;
30、将预测观测量变化数据输入至预设判别网络中,得到预测观测量变化数据对应的第一输出结果;
31、将实际观测量变化数据输入至预设判别网络中,得到实际观测量变化数据对应的第二输出结果;
32、基于第一输出结果和预设虚假标签值确定第一损失函数;基于第二输出结果和预设真实标签值确定第二损失函数;
33、基于第一损失函数和第二损失函数对预设判别网络进行调节,得到目标预设判别网络。
34、根据本发明的一方面,提供了一种设备控制装置,包括:
35、参数组确定模块,用于获取设备的目标执行部件的动作量对应的多个动作参数值,基于每一动作参数值确定一组参数组,参数组中包括观测量、执行动作量和外部变量分别对应的参数值;执行动作量包括目标执行部件的动作量;
36、观测量数据确定模块,用于基于预先训练的环境模型对每一参数组进行预测处理,得到每一参数组对应的观测量变化数据,环境模型用于模拟设备的运行环境,观测量变化数据为参数组经环境模型进行多次预测得到的随时间变化的观测量数据;
37、目标观测量变化数据确定模块,用于基于目标观测量变化数据在参数组分别对应的观测量变化数据中确定目标观测量变化数据;
38、目标执行部件控制模块,用于基于目标观测量变化数据对应的参数组中的动作参数值,控制设备的目标执行部件。
39、根据本发明的另一方面,提供了一种电子设备,电子设备包括:
40、至少一个处理器;以及
41、与至少一个处理器通信连接的存储器;其中,
42、存储器存储有可被至少一个处理器执行的计算机程序,计算机程序被至少一个处理器执行,以使至少一个处理器能够执行本发明任一实施例的设备控制方法。
43、根据本发明的另一方面,提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机指令,计算机指令用于使处理器执行时实现本发明任一实施例的设备控制方法。
44、根据本发明的另一方面,提供了一种计算机程序产品,其特征在于,计算机程序产品包括计算机程序,计算机程序在被处理器执行时实现本发明任一实施例的设备控制方法。
45、本发明实施例的技术方案,通过获取设备的目标执行部件的动作量对应的多个动作参数值,基于每一动作参数值确定一组参数组,参数组中包括观测量、执行动作量和外部变量分别对应的参数值;执行动作量包括目标执行部件的动作量;基于预先训练的环境模型对每一参数组进行预测处理,得到每一参数组对应的观测量变化数据,环境模型用于模拟设备的运行环境,观测量变化数据为参数组经环境模型进行多次预测得到的随时间变化的观测量数据;基于目标观测量变化数据在参数组分别对应的观测量变化数据中确定目标观测量变化数据;基于目标观测量变化数据对应的参数组中的动作参数值,控制设备的目标执行部件。以解决现有自动控制方法存在控制滞后、响应速度慢的问题,以及滞后的控制方法在外界因素发生大幅度变化而导致的控制稳定性差的问题,实现了通过本方案提出的设备控制方法实现设备提前做出响应,提高了设备控制的准确性、响应速度和稳定性,从而提高用户体验。
46、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!