自动化系统的控制方法、控制装置、存储介质和处理器与流程
本技术涉及自动化系统,具体而言,涉及一种自动化系统的控制方法、自动化系统的控制装置、计算机可读存储介质、处理器和电子设备。
背景技术:
1、在自动化控制系统中,操作变量包括调节阀的开度等连续控制信号,调节阀的开度调控温度和压力等被控变量,此外,操作变量还包括截止阀的动作类型(动作类型分为:全开、全关和不动作)等离散控制信号,现有技术中仅实现了对调节阀的开度等连续控制信号进行控制,使得调节阀的开度等连续控制信号对应的被控变量按照目标轨迹运行至目标值,而无法实现截止阀等离散控制信号进行控制,以使截止阀的动作类型等离散控制信号对应的被控变量的值贴近目标轨迹运行至被控变量的目标值的问题。
2、目前针对上述问题,暂无解决方案。
技术实现思路
1、本技术的主要目的在于提供一种自动化系统的控制方法、自动化系统的控制装置、计算机可读存储介质、处理器和电子设备,以至少解决现有技术中无法实现控制离散控制信号对应的被控变量值贴近目标轨迹运行被控变量的目标值的问题。
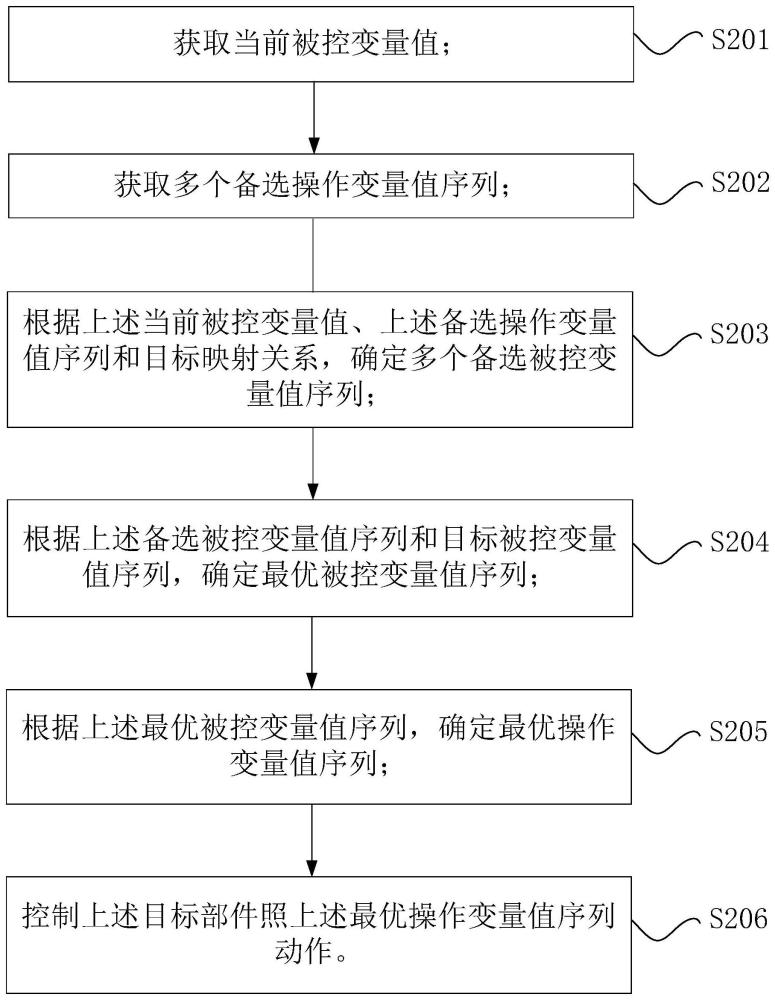
2、为了实现上述目的,根据本技术的一个方面,提供了一种自动化系统的控制方法,所述方法包括:获取当前被控变量值,所述当前被控变量值为当前时刻下的第一目标值,所述第一目标值为被控变量的值,所述被控变量为物理量,且所述自动化系统的目标部件的动作类型影响所述被控变量的值;获取多个备选操作变量值序列,所述备选操作变量值序列包括多个连续的未来时刻下的第二目标值,所述第二目标值为操作变量的值,所述操作变量的值表示所述目标部件的所述动作类型,任意两个所述备选操作变量值序列包含的所述第二目标值一一对应,且任意两个所述备选操作变量值序列中对应的所述第二目标值所属的所述未来时刻相同;根据所述当前被控变量值、所述备选操作变量值序列和目标映射关系,确定多个备选被控变量值序列,所述备选操作变量值序列与所述备选被控变量值序列一一对应,所述备选被控变量值序列包括多个连续的所述未来时刻下的所述第一目标值,任意两个所述备选被控变量值序列包含的所述第一目标值一一对应,且任意两个所述备选被控变量值序列中对应的所述第一目标值所属的所述未来时刻相同,所述目标映射关系为所述第一目标值与所述第二目标值的变化量之间的映射关系;根据所述备选被控变量值序列和目标被控变量值序列,确定最优被控变量值序列,所述最优被控变量值序列为与所述目标被控变量值序列吻合程度最高的所述备选被控变量值序列,所述目标被控变量值序列包括多个连续的所述未来时刻下的所述第一目标值,所述目标被控变量值序列的最后一个所述第一目标值为所述被控变量的目标值,任意一个所述备选被控变量值序列与所述目标被控变量值序列包含的所述第一目标值一一对应,且任意一个所述备选被控变量值序列与所述目标被控变量值序列中对应的所述第一目标值所属的所述未来时刻相同;根据所述最优被控变量值序列,确定最优操作变量值序列,所述最优操作变量值序列为所述最优被控变量值序列对应的所述备选操作变量值序列;控制所述目标部件照所述最优操作变量值序列动作。
3、可选地,获取多个备选操作变量值序列,包括:获取预设操作变量值范围和第一预设规则,所述预设操作变量值范围包括多个预设的所述第二目标值,所述第一预设规则为所述操作变量值序列中的所有的所述第二目标值均位于所述预设操作变量值范围内;至少基于所述预设操作变量值范围和所述第一预设规则,确定多个所述备选操作变量值序列。
4、可选地,至少基于所述预设操作变量值范围和所述第一预设规则,确定多个所述备选操作变量值序列,包括:获取预设数量和第二预设规则,所述第二预设规则为所述备选操作变量值序列中满足预设条件的所述第二目标值的数量小于或者等于所述预设数量,所述预设条件为所述第二目标值对应的所述动作类型不为目标动作类型,所述目标动作类型为表示所述目标部件不动作的所述动作类型;基于所述预设操作变量值范围、所述第一预设规则、所述预设数量和所述第二预设规则,确定多个所述备选操作变量值序列。
5、可选地,根据所述备选被控变量值序列和目标被控变量值序列,确定最优被控变量值序列,包括:第一计算步骤,计算筛选被控变量值序列与所述目标被控变量值序列中对应的所述第一目标值之间的差值的平方,得到多个目标平方,所述筛选被控变量值序列为所述备选被控变量值序列中的一个,所述目标平方与所述筛选被控变量值序列的所述第一目标值一一对应;第二计算步骤,计算所有的所述目标平方的和,得到目标和;重复步骤,重复所述第一计算步骤和所述第二计算步骤多次,直至得到多个所述目标和,所述目标和与所述备选被控变量值序列一一对应;确定步骤,确定最小的所述目标和对应的所述备选被控变量值序列为所述最优被控变量值序列。
6、可选地,控制所述目标部件照所述最优操作变量值序列动作,包括:获取第三目标值,所述第三目标值为所述最优操作变量值序列的第一个所述第二目标值;控制所述目标部件在目标时刻下按照所述第三目标值对应的所述动作类型动作,所述目标时刻为所述第三目标值对应的所述未来时刻。
7、可选地,所述方法还包括:根据确定所述目标被控变量值序列,其中,t为未来周期,所述未来周期包括多个连续的所述未来时刻,cvm为所述当前被控变量值,cvn为所述被控变量的目标值,xi为第i个所述未来时刻,yi为所述目标被控变量值序列中的第i个所述第一目标值。
8、根据本技术的另一方面,提供了一种自动化系统的控制方法,所述方法包括:第一获取单元,用于获取当前被控变量值,所述当前被控变量值为当前时刻下的第一目标值,所述第一目标值为被控变量的值,所述被控变量为物理量,且所述自动化系统的目标部件的动作类型影响所述被控变量的值;第二获取单元,用于获取多个备选操作变量值序列,所述备选操作变量值序列包括多个连续的未来时刻下的第二目标值,所述第二目标值为操作变量的值,所述操作变量的值表示所述目标部件的所述动作类型,任意两个所述备选操作变量值序列包含的所述第二目标值一一对应,且任意两个所述备选操作变量值序列中对应的所述第二目标值所属的所述未来时刻相同;第一确定单元,用于根据所述当前被控变量值、所述备选操作变量值序列和目标映射关系,确定多个备选被控变量值序列,所述备选操作变量值序列与所述备选被控变量值序列一一对应,所述备选被控变量值序列包括多个连续的所述未来时刻下的所述第一目标值,任意两个所述备选被控变量值序列包含的所述第一目标值一一对应,且任意两个所述备选被控变量值序列中对应的所述第一目标值所属的所述未来时刻相同,所述目标映射关系为所述第一目标值与所述第二目标值的变化量之间的映射关系;第二确定单元,用于根据所述备选被控变量值序列和目标被控变量值序列,确定最优被控变量值序列,所述最优被控变量值序列为与所述目标被控变量值序列吻合程度最高的所述备选被控变量值序列,所述目标被控变量值序列包括多个连续的所述未来时刻下的所述第一目标值,所述目标被控变量值序列的最后一个所述第一目标值为所述被控变量的目标值,任意一个所述备选被控变量值序列与所述目标被控变量值序列包含的所述第一目标值一一对应,且任意一个所述备选被控变量值序列与所述目标被控变量值序列中对应的所述第一目标值所属的所述未来时刻相同;根据所述最优被控变量值序列,确定最优操作变量值序列,所述最优操作变量值序列为所述最优被控变量值序列对应的所述备选操作变量值序列;控制所述目标部件照所述最优操作变量值序列动作。
9、根据本技术的再一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行任意一种所述的自动化系统的控制方法。
10、根据本技术的又一方面,提供了一种处理器,所述处理器用于运行程序,其中,所述程序运行时执行任意一种所述的自动化系统的控制方法。
11、根据本技术的另一方面,提供了一种电子设备,包括:一个或多个处理器,存储器,以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行任意一种所述的自动化系统的控制方法。
12、应用本技术的技术方案,首先,获取当前被控变量值,然后,获取多个备选操作变量值序列,即获取目标部件在未来的多个动作方案,之后,根据当前被控变量值、备选操作变量值序列和目标映射关系,确定多个备选被控变量值序列,即确定目标部件在未来按照每种动作方案动作时被控变量的运行轨迹,之后,根据备选被控变量值序列和目标被控变量值序列,确定最优被控变量值序列,所述最优被控变量值序列为与所述目标被控变量值序列吻合程度最高的所述备选被控变量值序列,即确定与目标运行轨迹吻合程度最高的被控变量的的运行轨迹为最优运行轨迹,之后,根据最优被控变量值序列,确定最优操作变量值序列,所述最优操作变量值序列为所述最优被控变量值序列对应的所述备选操作变量值序列,即确定最优运行轨迹对应的动作方案为最优动作方案,最后,控制所述目标部件照所述最优操作变量值序列动作,即控制目标部件按照该最优的动作方案动作,从而实现控制被控变量的值贴近目标运行轨迹运行至被控变量的目标值,从而解决了现有技术中无法实现控制离散控制信号对应的被控变量值贴近目标轨迹运行被控变量的目标值的问题。
- 还没有人留言评论。精彩留言会获得点赞!