一种基于陀螺仪的智能地锁控制方法与流程
本发明涉及地锁控制领域,具体来说,尤其涉及一种基于陀螺仪的智能地锁控制方法。
背景技术:
1、地锁是一种用于控制停车位使用的机械或电子设备。它的主要功能是保护私人停车位免受未授权的车辆使用。地锁通常安装在停车位的地面上,可以通过各种机制升起或降下。当地锁升起时,它阻止车辆进入或离开停车位;当地锁降下时,车辆可以正常进出。
2、锁的类型和操作方式多种多样,包括:手动地锁、自动地锁与智能地锁;
3、1、手动地锁:需要人工操作来锁定或解锁。
4、2、自动地锁:可以通过遥控器、手机应用或其他自动化系统远程控制。
5、3、智能地锁:集成了传感器和网络连接功能,可以与智能停车管理系统同步,实现更高级的功能,如自动识别授权车辆、实时监控和远程管理。
6、例如,中国专利cn105068455b公开了一种智能地锁的控制装置,包括蓝牙通信模块,地锁处理单元,地锁状态隔离器,地锁驱动电路和电源模块。该发明采用中断方式来确定地锁的状态实现对地锁的开关控制,有效降低功效。
7、但上述技术方案可能无法准确感知和快速响应倾斜状态的变化,导致无法及时调整或错误调整;缺乏智能化的监测和自动调整机制,需要频繁的人工检查和维护,增加了运营成本,传统系统可能无法有效适应多变的环境条件和使用情况,导致性能不稳定或故障率高,缺乏精确的控制机制和动态优化,导致地锁调整不精确,可能出现超调或响应延迟,传感器数据易受噪声干扰,未经有效处理可能导致错误的判断和操作,缺乏有效的故障诊断和预防机制,当故障发生时可能导致长时间的停机和服务中断。
8、针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、为了克服以上问题,本发明旨在提出一种基于陀螺仪的智能地锁控制方法,目的在于解决传统地锁系统可能无法准确感知和快速响应倾斜状态的变化,导致无法及时调整或错误调整;缺乏智能化的监测和自动调整机制,需要频繁的人工检查和维护,增加了运营成本的问题。
2、为此,本发明采用的具体技术方案如下:
3、一种基于陀螺仪的智能地锁控制方法,该智能地锁控制方法包括以下步骤:
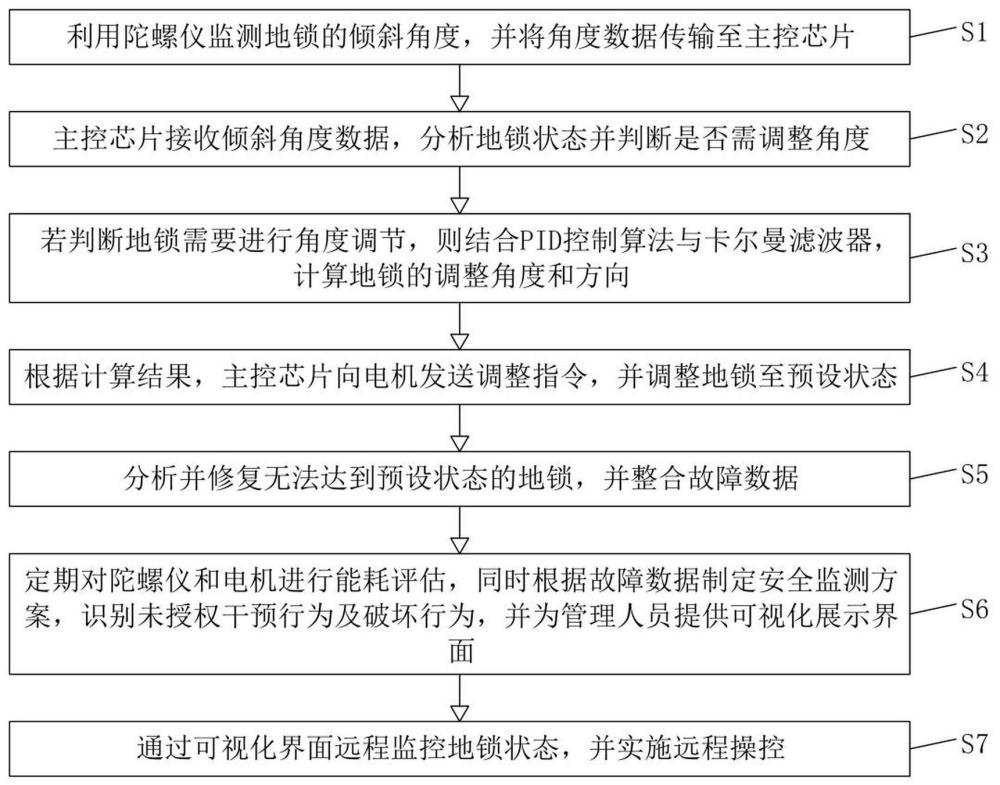
4、s1、利用陀螺仪监测地锁的倾斜角度,并将角度数据传输至主控芯片;
5、s2、主控芯片接收倾斜角度数据,分析地锁状态并判断是否需调整角度;
6、s3、若判断地锁需要进行角度调节,则结合pid控制算法与卡尔曼滤波器,计算地锁的调整角度和方向;
7、s4、根据计算结果,主控芯片向电机发送调整指令,并调整地锁至预设状态;
8、s5、分析并修复无法达到预设状态的地锁,并整合故障数据;
9、s6、定期对陀螺仪和电机进行能耗评估,同时根据故障数据制定安全监测方案,识别未授权干预行为及破坏行为,并为管理人员提供可视化展示界面;
10、s7、通过可视化界面远程监控地锁状态,并实施远程操控。
11、可选地,主控芯片接收倾斜角度数据,分析地锁状态并判断是否需调整角度包括以下步骤:
12、s21、收集地锁的倾斜角度数据;
13、s22、利用历史的地锁倾斜角度训练决策树模型;
14、s23、根据地锁的设计需求,设置倾斜角度的阈值;
15、s24、当主控芯片接收到新的倾斜角度数据时,使用训练好的决策树模型分析新的倾斜角度数据;
16、s25、根据分析结果,与倾斜角度的阈值比较,并判断地锁是否处于理想状态及是否需要进行角度调整。
17、可选地,当主控芯片接收到新的倾斜角度数据时,使用训练好的决策树模型分析新的倾斜角度数据包括以下步骤:
18、s241、基于历史的地锁倾斜角度和地锁的设计需求,选择影响预测结果的特征数据;
19、s242、使用影响预测结果的特征数据,并在决策树模型的每个节点根据预设条件判断特征数据的分类方向;
20、s243、根据特征数据的特征值沿着决策树上向下流动,沿途经过不同的分支,其中,分支代表决策路径;
21、s244、特征数据到达终节点时,由终节点提供预测结果;
22、s245、分析决策树模型预测结果的置信区间,并根据决策树模型的分析结果生成分析报告。
23、可选地,若判断地锁需要进行角度调节,则结合pid控制算法与卡尔曼滤波器,计算地锁的调整角度和方向包括以下步骤:
24、s31、定义pid控制器的参数初始化范围,并使用粒子群优化算法对pid控制器的参数进行优化;
25、s32、使用卡尔曼滤波器处理从陀螺仪传入的倾斜角度数据;
26、s33、根据优化后pid控制器的参数和卡尔曼滤波器处理后的倾斜角度数据计算地锁当前倾斜角度与倾斜角度的阈值之间的误差,并根据误差计算地锁的调整角度和方向;
27、s34、监测地锁调整的角度和方向,若角度和方向不满足倾斜角度的阈值,则运行粒子群优化算法对pid参数进行调整;
28、s35、根据计算得到的调整角度和方向生成控制指令,并将控制指令输出给主控芯片。
29、可选地,定义pid控制器的参数初始化范围,并使用粒子群优化算法对pid控制器的参数进行优化包括以下步骤:
30、s311、确定pid控制器的每个参数的初始化搜索范围,并设定优化目标;
31、s312、创建粒子群,每个粒子代表一组pid控制器的参数,并为每个粒子设定个体最优位置和全局最优位置;
32、s313、计算粒子群中每个粒子的适应值并更新个体最优位置;
33、s314、对每个粒子,将粒子的适应值与整个粒子群历史最优位置的适应值进行比较,更新全局最优位置;
34、s315、根据个体最优位置和全局最优位置,更新粒子的速度和位置;
35、s316、重复执行s312-s315的步骤,计算每个粒子的适应值,并进行迭代优化;
36、s317、在迭代优化结束后,选择表现最佳的粒子代表的pid参数作为最终pid控制器的参数。
37、可选地,使用卡尔曼滤波器处理从陀螺仪传入的倾斜角度数据包括以下步骤:
38、s321、将陀螺仪初始时刻的角度作为初始状态,并初始化误差协方差矩阵;
39、s322、基于初始化误差协方差矩阵建立状态方程和观测方程;
40、s323、使用状态方程根据当前状态估计预测下一时刻的状态及预测误差协方差,同时计算卡尔曼增益;
41、s324、利用新的观测数据和卡尔曼增益,根据预测值和实际观测值的差异来更新状态估计和误差协方差;
42、s325、通过滤波器提取出的最终输出评估陀螺仪的倾斜角度。
43、可选地,使用状态方程根据当前状态估计预测下一时刻的状态及预测误差协方差,同时计算卡尔曼增益包括以下步骤:
44、s3231、利用当前的状态估计和状态方程预测下一时刻的状态;
45、s3232、计算与预测状态的预测误差协方差;
46、s3233、通过比较预测误差协方差,评估预测的准确度;
47、s3234、根据预测误差协方差和观测噪声协方差计算卡尔曼增益;
48、s3235、通过卡尔曼增益优化状态估计过程,并确保新的观测数据融入到当前的状态估计。
49、可选地,计算卡尔曼增益的公式为:
50、;
51、式中,表示卡尔曼增益;
52、表示在时刻之前的状态估计对于时刻的预测误差协方差;
53、表示观测矩阵;
54、表示观测矩阵的转置;
55、表示在时刻的观测噪声协方差。
56、可选地,分析并修复无法达到预设状态的地锁,并整合故障数据包括以下步骤:
57、s51、从地锁的陀螺仪中收集故障数据;
58、s52、从故障数据中提取故障特征数据,并构建故障检测模型;
59、s53、使用历史故障数据训练故障检测模型;
60、s54、对新收集的故障数据输入故障检测模型进行诊断;
61、s55、新收集的故障数据在故障检测模型中进行前向传播,经过各层的计算处理;
62、s56、每一层的神经元根据权重和激活函数处理数据,并向下一层传递信息;
63、s57、获取故障检测模型在输出层的输出结果,并根据故障检测模型的输出,解析故障类型,分析故障原因。
64、可选地,定期对陀螺仪和电机进行能耗评估,同时根据故障数据制定安全监测方案,识别未授权干预行为及破坏行为,并为管理人员提供可视化展示界面包括以下步骤:
65、s61、确定评估周期,并选择预设的时间点进行能耗评估;
66、s62、在设定的评估周期内,监测并记录陀螺仪和电机在正常运行及特定操作下的能耗数据;
67、s63、对能耗数据进行分析,识别异常情况下能耗模式的效率问题;
68、s64、整合地锁中故障数据的故障原因,并制定针对未授权干预或破坏行为的安全监测方案;
69、s65、设计并开发可视化界面,为管理人员展示地锁的实时状态、能耗数据和安全警报信息。
70、相较于现有技术,本技术具有以下有益效果:
71、1、本发明通过使用历史数据训练的决策树模型,更准确地分析和预测地锁的倾斜状态,主控芯片连续监控地锁的倾斜角度,并能自动决定是否需要调整角度,保证了地锁始终处于理想状态,减少了人工检查和干预的频率,决策树模型能够根据不同的环境条件和地锁使用情况进行调整,在多变的环境中仍然保持高效运作,主控芯片能够快速处理新接收到的数据,并做出判断,这保证地锁对各种情况的快速响应能力。
72、2、本发明中pid控制算法提供了精准的控制机制,结合比例、积分、微分控制,可以精确地调整地锁的角度和方向,以达到预定的目标状态,使用粒子群优化算法对pid参数进行动态调整,能够在不同工况下找到最佳的控制参数,提升了控制算法的适应性和效率,卡尔曼滤波器能够有效过滤陀螺仪传入数据的噪声,提供更加准确和平稳的倾斜角度数据,有助于提高控制算法的准确性和稳定性,通过及时更新pid控制器的参数,能够快速适应环境变化和系统需求,确保地锁及时准确地进行角度调整,通过计算当前倾斜角度与设定阈值之间的误差,并根据误差进行调整,可以最小化系统的整体误差,结合pid控制和卡尔曼滤波器的方法,提高了控制系统的鲁棒性,增强了在复杂环境下的可靠性。
73、3、本发明通过收集和分析故障数据,系统能够及时识别和诊断地锁的故障,减少停机时间,构建的故障检测模型可以快速准确地定位故障原因,使得维修工作更加高效,减少了猜测和试错的时间,使用历史故障数据训练模型有助于预测并防止未来的故障,提前采取维护措施减少故障发生。
74、4、本发明通过监测能耗模式,可以预测设备的故障和性能退化,提前进行维护,避免意外故障,针对未授权干预或破坏行为的安全监测方案可以增强系统的安全性,防止潜在的破坏和滥用,为管理人员提供可视化展示界面,可以增加系统透明度,使管理更加直观和容易,在检测到异常或安全问题时,系统可以快速响应并通知管理人员,减少潜在的损失和风险。
- 还没有人留言评论。精彩留言会获得点赞!