网络攻击情形下空间机械臂的安全滑模控制方法与系统
本发明涉及信息安全技术与智能控制领域,具体涉及网络攻击情形下空间机械臂的安全滑模控制方法与系统。
背景技术:
1、随着新一代信息技术、信息物理系统和机器人技术的深入发展,工业机器人在航空航天、军事装备、智能制造以及数字医疗等领域具有广泛应用。信息物理系统集计算、通信与控制于一体,实现了信息空间与物理空间中人、机、物、信息、环境等要素的交互映射与高效协同。空间机械臂作为一种典型的机器人系统通常部署在信息物理系统架构的物理层,并通过信息层与控制中心或其他边缘设备进行信息的交互,实现操作动作的精确控制或者多设备的协同。
2、另一方面,频发的网络攻击事件对国家安全、基础设施以及经济民生均造成极大威胁,保障信息物理系统的安全可靠愈发重要。此外,对于很多实际工况而言,通常只有空间机械臂的输出信息可测。因此,如何仅使用系统的量测输出信息在信息物理系统框架下对空间机械臂进行输出反馈安全控制的研究对保证既定控制任务的顺利完成具有重要的现实意义。现有技术的相关文献如下:
3、现有技术一-基于滑模的机械臂安全轨迹跟踪控制方法(公开号cn112947293a)
4、(1)现有技术一的技术方案
5、该专利申请公开了一种基于滑模的机械臂安全轨迹跟踪控制方法。方法主要涉及:获取机械臂内每个关节当前相对应的角度、角速度以及输入力矩估计信息;确定轨迹缩放函数并计算机械臂的实际跟踪轨迹;将实际跟踪轨迹所对应的期望关节角度、角速度和角加速度输入滑模控制器,利用滑模控制器对机械臂进行轨迹跟踪控制。该控制方法能够在存在外部干扰的时候实现轨迹跟踪以及避免碰撞。
6、(2)现有技术一的缺点
7、1)该专利申请仅抑制了外部干扰,控制器的设计过程中没有考虑恶意网络攻击带来的不利影响,当空间机械臂的执行机构受到虚假信数据注入攻击时,该方法不再适用。
8、2)该专利申请所提出的滑模控制器的参数调节主要基于人工经验,控制器设计过程较为复杂。
9、现有技术二-一种基于深度强化学习的信息物理系统安全控制方法(公开号cn113885330a)
10、(1)现有技术二的技术方案
11、该专利申请公开了一种基于深度强化学习的信息物理系统安全控制方法。方法的步骤包括使用马尔科夫决策过程描述受攻击情形下的信息物理系统;基于强化学习技术提出了一种基于李雅普诺夫函数的柔性actor-critic强化学习算法,并提供了一种深度神经网络训练框架。设计过程中融合李雅普诺夫稳定理论,保证了信息物理系统的稳定性。最后使用单连杆机械臂例子说明了方法的有效性。
12、(2)现有技术二的缺点
13、1)该专利申请所使用的安全控制器依赖于系统的全部状态,对于系统只有输出信号可测时,该方法不适用。
14、2)该专利申请没有考虑不同负载下的输出轴惯性以及系统参数突变导致系统存在不同的工作模态。
15、综上,现有技术的空间机械臂控制方法不适用于当空间机械臂的执行机构受到虚假信数据注入攻击以及系统只有输出信号可测的情况,且没有考虑不同负载下的输出轴惯性以及系统参数突变导致系统存在不同的工作模态的情况,从而难以保证空间机械臂的随机稳定性和控制性能且控制器设计难度高。
技术实现思路
1、本发明所要解决的技术问题在于如何提升空间机械臂的随机稳定性和控制性能且降低控制器设计难度。
2、本发明通过以下技术手段解决上述技术问题的:网络攻击情形下空间机械臂的安全滑模控制方法,包括以下步骤:
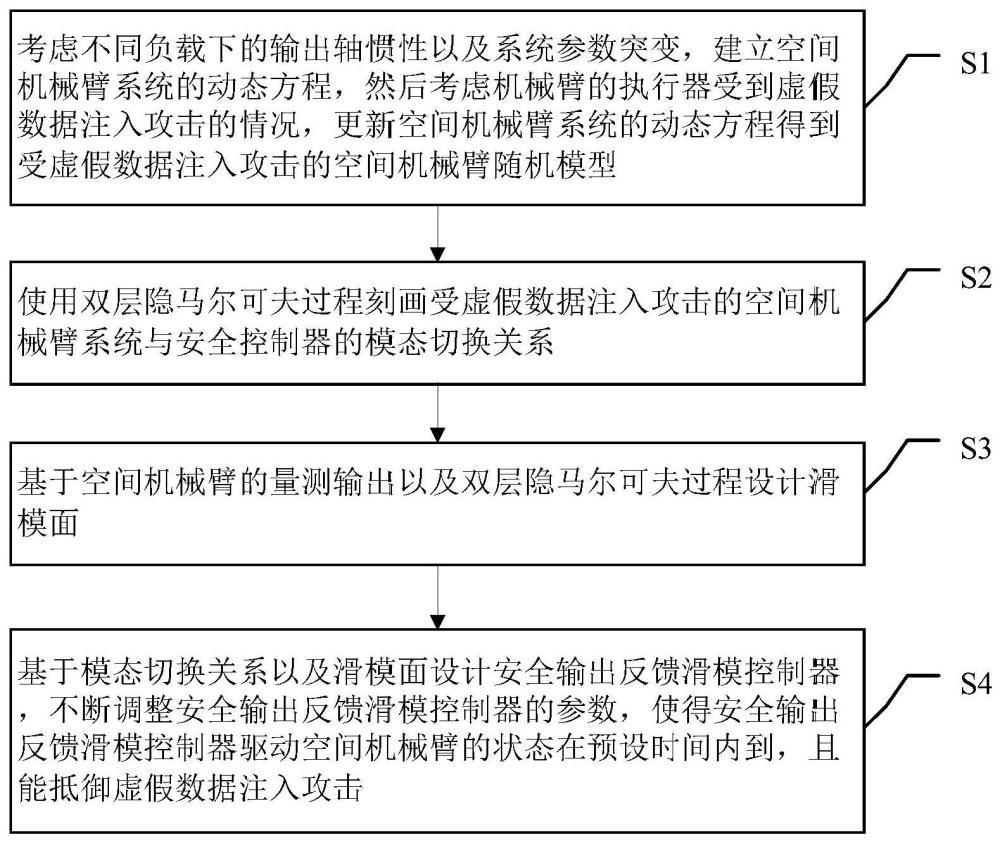
3、步骤一、考虑不同负载下的输出轴惯性以及系统参数突变,建立空间机械臂系统的动态方程,然后考虑机械臂的执行器受到虚假数据注入攻击的情况,更新空间机械臂系统的动态方程得到受虚假数据注入攻击的空间机械臂随机模型;
4、步骤二、使用双层隐马尔可夫过程刻画受虚假数据注入攻击的空间机械臂系统与安全控制器的模态切换关系;
5、步骤三、基于空间机械臂的量测输出以及双层隐马尔可夫过程设计滑模面;
6、步骤四、基于模态切换关系以及滑模面设计安全输出反馈滑模控制器,不断调整安全输出反馈滑模控制器的参数,使得安全输出反馈滑模控制器驱动空间机械臂的状态在预设时间内到达滑模面,且能抵御虚假数据注入攻击。
7、进一步地,所述步骤一包括:
8、空间机械臂随机切换模型的表达式为
9、
10、其中,x1(t)=ω,x3(t)=ε,为系统状态向量x(t)的4个分量,ω为空间机械臂的惯性轴关节角,ε为空间机械臂的输出轴关节角,u(t)为控制输入,ar,b,c均是系统参数矩阵,y(t)为量测输出,ua(y(t),t)为虚假数据注入攻击信号。
11、更进一步地,所述步骤二包括:
12、定义马尔可夫随机过程{αt}代表空间机械臂的3种不同的工作模态,r∈{1,2,3}表示3种不同的工作模态,定义马尔可夫随机过程{βt}为安全滑模控制器/滑模面的模态,{βt}在有限集合s2={1,2,…,n2}内取值,其中n2>0为正整数,代表估计的模态数目,满足下述模态切换关系
13、prob{βt=k|αt=r}=πrk,
14、其中,k为随机过程{βt}的在集合s2中取值,πrk为条件概率且满足由于βt在s2内取值,因此有βt+δt=l∈s2,则prob{βt+δt=l|αt+δt=q}=πql,其中,πql为当机械臂的工作模态αt+δt=q时安全滑模控制器/滑模面的模态βt+δt=l的条件概率,βt+δt为在时间t+δt时刻的安全滑模控制器/滑模面的模态,βt+δt=l为在时间t+δt时刻的安全滑模控制器/滑模面的模态βt+δt的取值为l,αt+δt为在时间t+δt时刻的机械臂的工作模态,q为在时间t+δt时刻的机械臂的工作模态αt+δt的取值为q。
15、更进一步地,所述步骤三包括:
16、基于测量得到的输出信号y(t)以及双层隐马尔可夫过程,设计滑模面如下
17、s(βt,t)=k(βt)y(t),βt∈s2,
18、其中,k(βt)为滑模面增益。
19、更进一步地,所述步骤四包括:
20、空间机械臂的惯性轴关节角和输出轴关节角均为有界的物理量,对于给定上界δ>0引入有界的滑模区域:
21、
22、其中,ξ:表示有界滑模区域,表示nx维空间,
23、设计如下形式的安全输出反馈滑模控制器:
24、
25、其中,s1为模态取值集合且s1={1,2,3},n1为机械臂的工作模态数目且n1=3,λrq代表从t到t+δt时刻空间机械臂系统的模态从r跳到q的转移概率速率,kl为在时间t+δt时刻的滑模面的增益,f(y(t),t)为已知的有界函数,γ>0,为给定的标量;sgn(s(βt,t))为滑模面s(βt,t)的符号函数,且变量kk为在t时刻的滑模面的增益,v为已知的常数。
26、更进一步地,所述步骤四还包括:
27、通过调整参数γ,使得安全输出反馈滑模控制器能够驱动从滑模区域中出发的空间机械臂的状态在预设时间内到达滑模面,且能抵御虚假数据注入攻击ua(y(t),t)的不利影响。
28、本发明还提供网络攻击情形下空间机械臂的安全滑模控制系统,包括:
29、模型构建模块,用于考虑不同负载下的输出轴惯性以及系统参数突变,建立空间机械臂系统的动态方程,然后考虑机械臂的执行器受到虚假数据注入攻击的情况,更新空间机械臂系统的动态方程得到受虚假数据注入攻击的空间机械臂随机模型;
30、模态关系获取模块,用于使用双层隐马尔可夫过程刻画受虚假数据注入攻击的空间机械臂系统与安全控制器的模态切换关系;
31、滑模面设计模块,用于基于空间机械臂的量测输出以及双层隐马尔可夫过程设计滑模面;
32、控制器设计模块,用于基于模态切换关系以及滑模面设计安全输出反馈滑模控制器,不断调整安全输出反馈滑模控制器的参数,使得安全输出反馈滑模控制器驱动空间机械臂的状态在预设时间内到达滑模面,且能抵御虚假数据注入攻击。
33、进一步地,所述模型构建模块还用于:
34、空间机械臂随机模型的表达式为
35、
36、其中,x1(t)=ω,x3(t)=ε,为系统状态向量x(t)的4个分量,ω为空间机械臂的惯性轴关节角,ε为空间机械臂的输出轴关节角,u(t)为控制输入,ar,b,c均是系统参数矩阵,y(t)为量测输出,ua(y(t),t)为虚假数据注入攻击信号。
37、更进一步地,所述模态关系获取模块还用于:
38、定义马尔可夫随机过程{αt}代表空间机械臂的3种不同的工作模态,r∈{1,2,3}表示3种不同的工作模态,定义马尔可夫随机过程{βt}为安全滑模控制器/滑模面的模态,{βt}在有限集合s2={1,2,…,n2}内取值,其中n2>0为正整数,代表估计的模态数目,满足下述模态切换关系
39、prob{βt=k|αt=r}=πrk,
40、其中,k为随机过程{βt}的在集合s2中取值,πrk为条件概率且满足
41、由于βt在s2内取值,因此有βt+δt=l∈s2,则prob{βt+δt=l|αt+δt=q}=πql,其中,πql为当机械臂的工作模态αt+δt=q时安全滑模控制器/滑模面的模态βt+δt=l的条件概率,βt+δt为在时间t+δt时刻的安全滑模控制器/滑模面的模态,βt+δt=l为在时间t+δt时刻的安全滑模控制器/滑模面的模态βt+δt的取值为l,αt+δt为在时间t+δt时刻的机械臂的工作模态,q为在时间t+δt时刻的机械臂的工作模态αt+δt的取值为q。
42、更进一步地,所述滑模面设计模块还用于:
43、基于测量得到的输出信号y(t)以及双层隐马尔可夫过程,设计滑模面如下
44、s(βt,t)=k(βt)y(t),βt∈s2,
45、其中,k(βt)为滑模面增益。
46、更进一步地,所述控制器设计模块还用于:
47、空间机械臂的惯性轴关节角和输出轴关节角均为有界的物理量,对于给定上界δ>0引入有界的滑模区域:
48、
49、其中,ξ:表示有界滑模区域,表示nx维空间,
50、设计如下形式的安全输出反馈滑模控制器:
51、
52、其中,s1为模态取值集合且s1={1,2,3}内取值,n1为机械臂的工作模态数目且n1=3,λrq代表从t到t+δt时刻空间机械臂系统的模态从r跳到q的转移概率速率,kl为在时间t+δt时刻的滑模面的增益,f(y(t),t)为已知的有界函数,γ>0,为给定的标量;sgn(s(βt,t))为滑模面s(βt,t)的符号函数,且变量kk为在t时刻的滑模面的增益,v为已知的常数。
53、更进一步地,所述控制器设计模块还用于:
54、通过调整参数γ,使得安全输出反馈滑模控制器能够驱动从滑模区域中出发的空间机械臂的状态在预设时间内到达滑模面,且能抵御虚假数据注入攻击ua(y(t),t)的不利影响。
55、本发明的优点在于:本发明考虑到了不同负载下的输出轴惯性以及系统参数突变导致系统存在不同的工作模态,建立空间机械臂系统的动态方程。使用双层隐马尔可夫过程刻画执行器受到虚假数据注入攻击的空间机械臂系统与安全控制器模态之间的模态切换关系,基于空间机械臂的量测输出以及双层隐马尔可夫过程设计滑模面,基于模态切换关系以及滑模面设计安全输出反馈滑模控制器,从而当空间机械臂的执行机构受到虚假信数据注入攻击时,该方法能适用,系统只有输出信号可测时,该方法同样适用,保证了空间机械臂的随机稳定性并改善了控制性能。此外,只需要调整安全输出反馈滑模控制器的参数即可实现优化控制,在降低控制器设计难度的同时扩大本发明的使用范围。
- 还没有人留言评论。精彩留言会获得点赞!