一种光伏电站施工巡视方法与流程
本发明涉及光电,尤其涉及一种光伏电站施工巡视方法。
背景技术:
1、在光伏电站建设期间,因占地面积极广、设备数量极多等各类因素,项目建设总包管理难度变大。目前传统的项目管理数据主要依靠施工单位上报,建设单位管理人员、监理人员、总包管理人员到施工现场进行定期巡视抽查。由于面积广、施工作业面分散,地形复杂,靠人力巡视无法进行有效的管理。效率低、成本高,标准化程度低,不利于企业的长久发展。
2、目前相关技术通过在光伏电站架设地面摄像头,通过架设的地面摄像头监控施工人员的工作状态,由地面建设单位的管理人员、监理人员等人工记录每天的施工进度,建设运行情况。由于光伏电站占地面积广,施工作业面分散,固定摄像头和人工监理的方案无法保证全面的发现并解决问题。而且只能通过层层汇报和粗略估计的方式,无法准确把控施工进度。
技术实现思路
1、本发明提供一种光伏电站施工巡视方法,用以解决现有技术中无法准确把控施工进度的缺陷,实现精准的把控施工进度,提高施工质量。
2、本发明提供一种光伏电站施工巡视方法,包括:
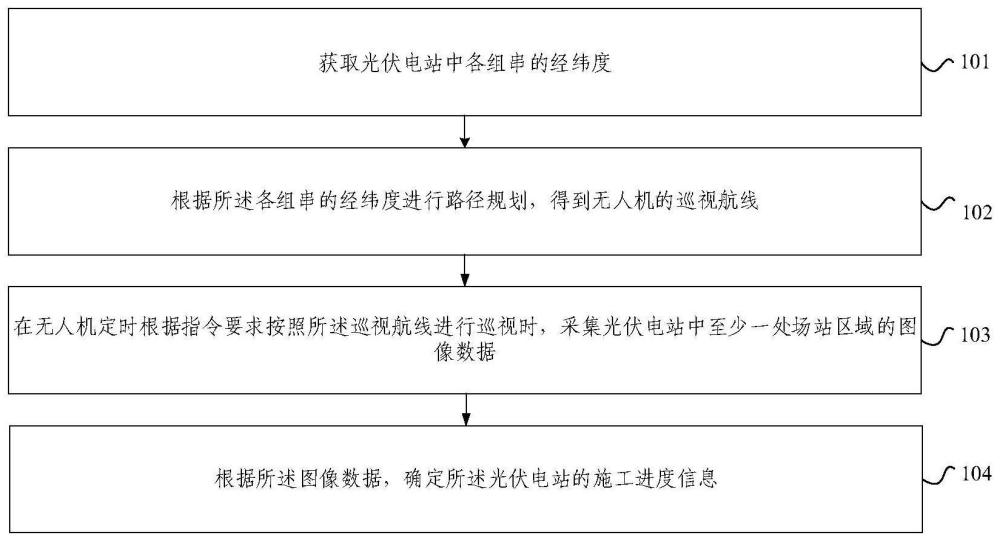
3、获取光伏电站中各组串的经纬度;
4、根据所述各组串的经纬度进行路径规划,得到无人机的巡视航线;
5、在无人机根据指令要求按照所述巡视航线进行巡视时,采集光伏电站中至少一处场站区域的图像数据;
6、根据所述图像数据,确定所述光伏电站的施工信息。
7、根据本发明提供的光伏电站施工巡视方法,所述获取光伏电站中各组串的经纬度,包括:
8、获取光伏电站的施工图,所述施工图中包括组串布局信息,其中,所述组串布局信息包括组串的排列方式、组串之间的相对位置以及组串与光伏电站中的已知地标之间的相对位置中的至少一种;
9、采集光伏电站的全景图像;
10、根据所述组串布局信息以及所述全景图像,获取光伏电站的施工图中各组串的经纬度。
11、根据本发明提供的光伏电站施工巡视方法,所述根据所述组串布局信息以及所述全景图像,获取光伏电站的施工图中各组串的经纬度,包括:
12、将所述组串布局信息与所述全景图像进行比对,确定所述全景图像中的特征地标,所述特征地标用于表征出至少一个组串在所述全景图像中的位置信息;
13、根据所述组串布局信息以及所述特征地标,获取光伏电站的施工图中各组串的经纬度。
14、根据本发明提供的光伏电站施工巡视方法,所述获取光伏电站中各组串的经纬度,包括:
15、采集光伏电站的全景图像;
16、根据所述全景图像以及无人机的位姿信息,获取光伏电站中各组串的经纬度。
17、根据本发明提供的光伏电站施工巡视方法,所述根据所述全景图像以及无人机的位姿信息,获取光伏电站中各组串的经纬度,包括:
18、确定光伏电站中各组串在所述全景图像中的像素坐标;
19、基于无人机的位姿信息,将所述各组串的像素坐标转化为大地坐标,得到各所述组串的经纬度;
20、基于所述各组串的多个点的所述大地坐标得到各所述组串的经纬度。
21、根据本发明提供的光伏电站施工巡视方法,所述各组串的图像区域中包括多个点,通过如下公式将任一点的像素坐标(uk,vk)转化为大地坐标(x,y):
22、
23、
24、
25、
26、
27、
28、其中,(u0,v0)为无人机的中心点坐标,(x0,y0)为无人机在拍摄所述全景图像时的大地坐标,p为每个像素大小,f为焦距,α为无人机在拍摄所述全景图像时的偏航角,β为无人机在拍摄所述全景图像时的俯仰角,γ为无人机在拍摄所述全景图像时的翻滚角,h为无人机在拍摄所述全景图像时的高度。
29、根据本发明提供的光伏电站巡视施工方法,光伏电站包括第一区域以及第二区域,所述第一区域为已安装组串的区域,所述第二区域为未安装组串的区域,所述方法还包括:
30、采集光伏电站的所述第一区域对应的全景图像;
31、根据所述第一区域对应的全景图像以及无人机的位姿信息,获取光伏电站中已安装组串的经纬度;
32、根据光伏电站中组串之间的相对位置以及所述已安装组串的经纬度,确定所述第二区域中未安装组串的经纬度。
33、根据本发明提供的光伏电站巡视施工方法,还包括:
34、确定所述各组串匹配的第一目标对象的标识信息;其中,所述第一目标对象包括桩子、飞机头以及光伏面板支架;
35、建立所述各组串匹配的第一目标对象的标识信息与所述各组串的经纬度的映射关系。
36、根据本发明提供的光伏电站施工巡视方法,所述施工信息包括施工进度,所述根据所述图像数据,确定所述光伏电站的施工信息,包括:
37、识别各所述场站区域的图像数据中的第二目标对象,其中,所述第二目标对象包括桩子、飞机头以及光伏面板支架;
38、根据各所述场站区域中所述第二目标对象的施工状态,确定所述光伏电站的施工进度。
39、根据本发明提供的光伏电站施工巡视方法,所述识别各所述场站区域的图像数据中的第二目标对象,包括:
40、基于yolact构建目标检测模型,对各所述场站区域的图像数据中的第二目标对象进行检测。
41、根据本发明提供的光伏电站施工巡视方法,所述根据各所述场站区域中所述第二目标对象的施工状态,确定所述光伏电站的施工进度之前,还包括:
42、根据各所述图像数据的实际经纬度与所述巡视航线中所规划的预期经纬度,对各所述图像数据中的第二目标对象进行去重。
43、根据本发明提供的光伏电站施工巡视方法,所述根据各所述图像数据的实际经纬度与所述巡视航线中所规划的预期经纬度,对各所述图像数据中的第二目标对象进行去重,包括:
44、比对所述图像数据中目标点的实际经纬度与所述巡视航线中所规划的预期经纬度之间的经纬度偏差;
45、根据所述经纬度偏差,对所述图像数据中不属于所述巡视航线中所要拍摄的第二目标对象进行去重。
46、根据本发明提供的光伏电站施工巡视方法,所述根据各所述场站区域中所述第二目标对象的施工状态,确定所述光伏电站的施工进度之前,还包括:
47、比对图像数据中第二目标对象的经纬度,确定重合的第二目标对象;
48、对所述重合的第二目标对象进行去重。
49、根据本发明提供的光伏电站施工巡视方法,所述根据各所述场站区域中所述第二目标对象的施工状态,确定所述光伏电站的施工进度之前,还包括:
50、通过分析图像数据确定是否存在漏拍区域;
51、在存在漏拍区域的情况下,控制无人机采集所述漏拍区域的图像数据,并识别出所述漏拍区域的图像数据中的第二目标对象。
52、根据本发明提供的光伏电站施工巡视方法,还包括:
53、将当前巡视航线下所识别出的各所述场站区域中所述第二目标对象与上一巡视航线下所识别出的各所述场站区域中所述第二目标对象进行比对,得到比对结果;
54、根据所述比对结果以及预期施工计划,确定当前光伏电站的施工结果。
55、根据本发明提供的光伏电站巡视方法,所述施工信息包括违规施工行为,所述根据所述图像数据,确定所述光伏电站的施工信息,还包括:
56、根据所述图像数据,识别出光伏电站中的违规施工行为;
57、根据所述违规施工行为,输出相应的预警信息。
58、本发明还提供一种光伏电站施工巡视装置,包括:
59、组串定位模块,用于获取光伏电站中各组串的经纬度;
60、路径规划模块,用于根据所述各组串的经纬度进行路径规划,得到无人机的巡视航线;
61、图像采集模块,用于在无人机根据指令要求按照所述巡视航线进行巡视时,采集光伏电站中至少一处场站区域的图像数据;
62、施工监控模块,用于根据所述图像数据,确定所述光伏电站的施工信息。
63、本发明提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述光伏电站施工巡视方法的步骤。
64、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述光伏电站施工巡视方法的步骤。
65、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述光伏电站施工巡视方法的步骤。
66、本发明提供的光伏电站施工巡视方法,先获取光伏电站中各组串的经纬度;接着根据各组串的经纬度进行路径规划,得到无人机的巡视航线;在无人机根据指令要求按照巡视航线进行巡视时,采集光伏电站中至少一处场站区域的图像数据;最后根据图像数据,确定光伏电站的施工信息。本发明的光伏电站施工巡视方法通过无人机实现智慧化巡视采集图像数据,采集的图像数据可以用于精确分析施工进度,相较于人眼观察与地面摄像头,无人机搭载的高清摄像头可以高效、精确地收集和分析光伏电站的图像数据,从而能够显著提高施工进度监控的效率和安全性。
- 还没有人留言评论。精彩留言会获得点赞!