一种基于图像识别技术的定日镜清洗姿态校准方法与流程
本技术属于定日镜清洗,具体一种基于图像识别技术的定日镜清洗姿态校准方法。
背景技术:
1、塔式太阳能光热发电镜场一般采用定日镜作为反射光介质。塔式太阳能光热发电过程是通过定日镜将太阳光束精准反射到吸热器上,吸热器再将镜场辐射能量储备在熔盐罐中。附着在定日镜镜面上灰尘颗粒会减少定日镜反射到吸热器上太阳光束,降低吸热器获取的辐射能量。因此清洗定日镜镜面对于保持塔式太阳能光热发电效率有非常重要作用。清洗定日镜过程是将定日镜竖立起来,镜面朝向清洗车通道,清洗车两侧清洗刷在运动过程中,完成对两侧定日镜清洗。
2、然而,通常情况下,少数定日镜的清洗姿态是错误的,导致清洗车无法通过清洗车通道,见图1。现有方法是镜场运维人员持定日镜驱动器调试箱、可移动电源、便携式计算机,调试定日镜驱动器的方位角和俯仰角,使定日镜运转到清洗车能通过的姿态。操作效率非常低,操作时间非常长。
技术实现思路
1、基于上述问题,本发明针对这一点,提出了基于图像识别技术的定日镜清洗姿态校准方案,其技术方案为,
2、一种基于图像识别技术的定日镜清洗姿态校准方法,包括以下步骤:
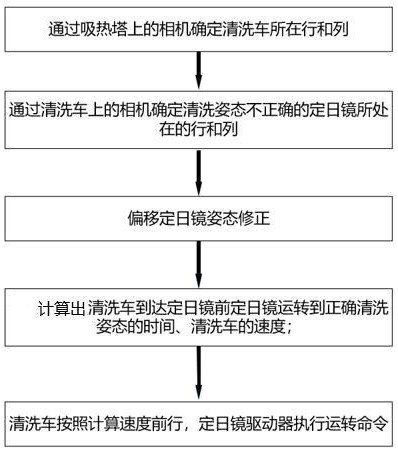
3、s1.通过吸热塔上的相机确定清洗车所在行和列;
4、s2.通过清洗车上的相机确定清洗姿态不正确的定日镜所处在的行和列;
5、s3.偏移定日镜姿态修正;
6、s4.计算出清洗车到达定日镜前定日镜运转到正确清洗姿态的时间以及清洗车的速度;
7、s5.清洗车按照计算速度前行,定日镜驱动器执行运转命令。
8、优选的,步骤s1中,s11吸热塔上安装多个相机,确保这些相机的图像组合起来可以覆盖到全部镜场;
9、s12.对每个相机内镜场行列交叉点进行标注,行列交叉点的图像坐标和世界坐标形成映射关系;
10、s13.通过给清洗车添加标志性特征,在图像中识别出清洗车;
11、s14.根据清洗车在来源相机的图像中的位置和行列交叉点的标注结果进行插值就可以确定清洗车所在的世界坐标,通过相机模型对清洗车世界坐标进行验证。
12、步骤s14中,清洗车位置在吸热塔上相机坐标系为:
13、 ;
14、在世界坐标系中为:
15、 ;
16、两者的变换关系如下:
17、 ;
18、其中,tc是吸热塔上相机的英文缩写,i是相机编号,w代表世界坐标系;、和分别代表吸热塔第i个相机的世界坐标的三个分量,是两个坐标系统变换的旋转矩阵;根据相机坐标系下清洗车坐标,可以求得清洗车的图像坐标,即
19、 ;
20、其中,是求得的清洗车的图像坐标,和代表吸热塔上第i相机的焦距参数,和分别是吸热塔上第i相机光轴在图像中的x和y坐标;如果计算所得的图像坐标与实测坐标的差值大于设定阈值,则说明相机和镜场的相对位置发生了变化,需要重新标注清洗车所在的行列交叉点和对应的吸热塔上相机的位置。
21、优选的,步骤s2中,
22、s21.识别清洗车两侧定日镜:
23、首先加载输入清洗车上相机拍摄的清洗车前方图像,然后将其转为灰度图像,即图像的像素点灰度值在0至255之间;然后设定参考阈值为127,小于127的像素点灰度置为0,大于等于127的像素点灰度置为255,从而将整个图像呈现出明显的黑白效果,得到二值化图像;然后查找所有定日镜轮廓;最后,根据轮廓的特性判断是否为四边形,并且四边形的面积要大于指定阈值(指定阈值为1/2定日镜面积);
24、s22.识别偏移定日镜:
25、假设一个定日镜位于清洗车前方,定日镜镜面中心坐标为,h代表定日镜的坐标;w是世界坐标,j是定日镜的序号,是定日镜长度的一半,定日镜宽度的一半;定日镜的姿态从镜场控制系统获取,从定日镜的姿态可以确定定日镜的旋转矩阵,在定日镜处于初始状态时,四角坐标分别为、、和,定日镜旋转后,左上角坐标变为:
26、 ;
27、右上角坐标变为:
28、 ;
29、左下角坐标变为:
30、 ;
31、右下角坐标变为:
32、 ;
33、清洗车的位置通过步骤s13获得,清洗车上相机与清洗车的相对位置是固定的,因此也就可以获得清洗车上相机的世界坐标:
34、 ;
35、其中,cc代表清洗车相机,清洗车的姿态与清洗车所在行相关,由于清洗通道是平直的,清洗车的朝向可以直接确定,也就是确定了清洗车的姿态,而相机与清洗车间的相对位置固定,也就是说相机和清洗车之间角度是固定的,确定了清洗车姿态也就确定了相机姿态,则坐标系间变换的旋转矩阵为;定日镜任意一角对应的点在清洗车上相机坐标系与世界坐标系间的变换关系如下:
36、 ;
37、其中,代表定日镜任意一角在清洗车相机坐标系下的坐标,代表定日镜任意一角在世界坐标系下的坐标;
38、定日镜四个角的图像坐标则计算可得为:
39、 ;
40、其中,代表计算定日镜的图像坐标;和代表清洗车相机的焦距参数,和分别是清洗车相机光轴在图像中的x和y坐标;计算所得坐标与步骤s21中对应位置四边形的四个顶点坐标进行对比,如果和差值大于设定阈值,则说明定日镜没有转到指定姿态,镜场控制系统给出定日镜姿态与实际不符,需要调整定日镜到清洗姿态,以便清洗车完成清洗工作。
41、优选的,步骤s3中,
42、根据偏移定日镜的四个角的图像坐标、定日镜中心坐标、清洗车相机位置和姿态,求解定日镜姿态;
43、定日镜姿态由定日镜的方位角和俯仰角确定,这两个角确定了实际上定日镜的旋转矩阵,即:
44、 ;
45、在旋转矩阵下,四个角的世界坐标满足以下关系:
46、;
47、;
48、;
49、;
50、其中,、、、分别代表左上、右上、左下、右下四个角;代表编号为j的定日镜的镜面中心的世界坐标;、、、分别代表左上、右上、左下、右下四个角的世界坐标;四个角的相机坐标与世界坐标间满足以下关系:
51、;
52、;
53、;
54、;
55、四个角的图像坐标与相机坐标间满足以下关系:
56、 ;
57、 ;
58、 ;
59、 ;
60、至此,已经在步骤s22中给出获取方法,求解定日镜方位角和俯仰角两个未知数。
61、优选的,步骤s4中,编号为j的定日镜在正确清洗姿态时的方位角和俯仰角分别为和,定日镜方位旋转轴和俯仰旋转轴转速分别为和,则运转到正确清洗姿态的时间为:
62、 ;
63、清洗车此时的世界坐标为,编号为j的定日镜的世界坐标为,则清洗车到达定日镜前的速度应该为:
64、。
65、优选的,步骤s5中,设置镜场控制系统,根据步骤s2获得定日镜所在行和列,向定日镜驱动器下发运转命令;运转命令内容包含定日镜运转方向、角度、速度;镜场控制系统根据步骤s4计算出来的清洗车速度,向清洗车下发速度命令,定日镜在清洗车到达前,运转到正确清洗姿态。
66、与现有技术相比,本技术有益效果如下:
67、使用该方案可以准确获取清洗车所处在镜场的行和列位置,获取清洗姿态不正确定日镜所处在镜场的行和列位置,根据清洗车速度和清洗车与定日镜距离及定日镜偏离角度,计算出定日镜运转速度,在清洗车到达该定日镜前,定日镜自动运转到正确清洗姿态。同时免除运维人员携带定日镜驱动器调试箱、可移动电源、便携式计算机校准定日镜清洗姿态的操作,减轻镜场运维人员工作负担。
- 还没有人留言评论。精彩留言会获得点赞!