一种智能升降桌的控制方法及智能升降桌与流程
本技术涉及智能升降控制技术,尤指一种智能升降桌的控制方法及其智能升降桌。
背景技术:
1、在现代办公环境中,升降桌作为一种提高办公舒适度和效率的重要工具,逐渐成为人们工作生活中不可或缺的组成部分。升降桌的设计旨在满足人们在不同工作状态下对桌面高度的需求,如坐着或站着工作。然而,尽管市场上的升降桌种类繁多,它们的智能化水平仍有待提高。现有的智能升降桌大多采用预设高度或简单的电子控制系统,这些系统通常要求用户输入或选择一个固定的高度设定。这种方法缺乏灵活性和个性化,无法自动识别用户当前的姿态并相应调整桌面高度。此外,传统的升降桌也很少考虑到人体工程学的原则,不能确保在不同用户之间转换时,桌面高度的调整能够符合每个独特用户的人体工程学需求。
2、比如,中国专利cn111950392b披露了一种基于深度相机kinect的人体坐姿识别方法,属于深度相机识别技术领域。该方法利用kinect相机捕捉待识别对象的图像,并识别对象的多个骨骼关节特征点的三维位置坐标以及四元数位置坐标。通过计算双眼到阅读对象间的距离、双肩的高度差和脊椎的角度,以及每段骨骼的三向旋转角度,能够评估受试者的坐姿是否健康。如果计算结果在预设的可接受范围内,则坐姿认为是合格的;否则,为不合格。通过这种方式,旨在提供一个准确性和舒适性高,同时成本低廉的坐姿识别解决方案。这种坐姿识别方法的优势在于,与其他类型的坐姿检测系统相比,kinect的使用减少了对光照和衣物的依赖,并提供了三维空间的准确数据。然而,该方法在实现上存在一定的复杂性,需要通过多步骤的计算和坐标系统建立来识别坐姿的合格性。这不仅增加了处理时间,也增加了实施的技术难度。更重要的是,该方法专注于单一坐姿的识别,没有考虑用户可能切换到其他工作模式,如站立工作或不同的坐姿。因此,cn111950392b虽然对于坐姿识别提供了一种有效的技术方案,但其智能化水平在支持灵活的工作环境和多样的工作姿态方面有限,没有实现多工作模式下的智能升降能力,这在多变的现代工作环境中可能会导致用户体验和工作效率的不足。
3、再比如,中国专利申请cn112471744a披露了一种智能升降桌,通过集成升降桌腿、桌面、控制器以及外部智能设备来实现桌面高度的智能调节;其创新之处在于利用无线传输模块与外部智能设备进行数据传输,依据用户状态的监测数据自动调节桌面高度,增强使用便捷性。其存储模块中预存了基于用户身高得出的最佳桌面高度数据,使得调节时能自动选择最优高度,提高使用舒适性。尽管该方法实现了桌面高度的自动调整功能,并在一定程度上提升了用户体验,但其智能化水平仍有限。cn112471744a主要关注在驱动层面的改进,例如自动启停和驱动电机的正反旋转控制,并能根据预存数据调整桌面高度。然而,该方法没有充分考虑人体工学的原则,特别是在多种工作模式下的适应性。换言之,它未能实现一个全面考虑人体姿态变化的智能升降系统,如坐立工作模式的无缝切换,或是依据用户的具体活动自动调整桌面高度和角度等等。
4、综上,目前现有技术的局限性在于它们主要集中在改进驱动机制、坐姿基本识别和提供基本的高度调节功能上,而没有充分考虑到人体工学的综合需求和工作模式的多样性。尽管它们能够根据用户身高数据预设和调整桌面高度,实现一定程度的自动化,但这些系统往往缺乏对用户姿态变化的实时响应能力,无法适应用户在不同工作任务中的自然转换。因此,需要开发一种更加智能化、灵活且人体工学友好的升降桌解决方案,以提供真正符合现代工作生活方式的用户体验。
技术实现思路
1、有鉴于此,本技术提供了一种智能升降桌的控制方法及智能升降桌,以期至少部分地解决上述技术问题。
2、一方面,本技术提供了一种智能升降桌的控制方法,包括如下步骤:
3、步骤a,检测用户的骨骼关键点,获取所述骨骼关键点的坐标信息,所述坐标信息包括三维坐标信息;
4、步骤b,根据所述骨骼关键点的坐标信息,确定大臂的长度、大臂与小臂之间的第一夹角,以及大臂与躯干之间的第二夹角;
5、步骤c,根据不同工作模式,匹配输出对应的第一预设范围和第二预设范围;并根据所述第一夹角与第一预设范围的比较结果,以及所述第二夹角与第二预设范围的比较结果,确定目标高度数值;
6、步骤d,根据所述目标高度数值,控制所述智能升降桌的动作,将其调整至目标高度。
7、上述控制方法,还具有如下特点:
8、所述工作模式包括默认工作模式和定制工作模式;
9、当用户选择默认工作模式时,或者用户没有选择工作模式时,输出所述默认工作模式对应的第一预设范围和第二预设范围。
10、上述控制方法,还具有如下特点:
11、所述定制工作模式包括基于用户不同工作姿态区分的站姿工作模式和坐姿工作模式,以及基于用户不同工作内容、不同偏好区分的阅读工作模式、书写工作模式、键入工作模式和护颈工作模式。
12、上述控制方法,还具有如下特点,所述定制工作模式中:
13、当用户选择一种工作模式时,输出所选工作模式对应的第一预设范围和第二预设范围;
14、当用户同时选择两种工作模式时,两种工作模式中的第一预设范围构成的交集为对应输出的第一预设范围,两种工作模式中的第二预设范围构成的交集为对应输出的第二预设范围;选择两种工作模式包括选择站姿工作模式和坐姿工作模式中的一种,以及选择阅读工作模式、书写工作模式、键入工作模式和护颈工作模式中的一种。
15、上述控制方法,还具有如下特点:
16、所述默认工作模式中,第一预设范围为90°-120°,第二预设范围为0-15°。
17、上述控制方法,还具有如下特点:
18、所述站姿工作模式中,第一预设范围为100°-110°,第二预设范围为5°-10°;
19、所述坐姿工作模式中,第一预设范围为90°-100°,第二预设范围为10°-15°。
20、上述控制方法,还具有如下特点:
21、所述阅读工作模式中,第一预设范围为100°-120°,第二预设范围为0-5°;
22、所述书写工作模式中,第一预设范围为90°-105°,第二预设范围为10°-20°;
23、所述键入工作模式中,第一预设范围为95°-105°,第二预设范围为5°-15°;
24、所述护颈工作模式中,第一预设范围为110°-120°,第二预设范围为0-10°。
25、上述控制方法,还具有如下特点:
26、所述步骤a中,所述检测采用双目视觉检测机制,通过将双目相机检测的双目画面输入到神经网络中,基于骨骼关键点的位置视差,确定骨骼关键点的三维坐标信息。
27、上述控制方法,还具有如下特点:
28、所述骨骼关键点包括肩膀点、手肘点和手腕点。
29、上述控制方法,还具有如下特点:
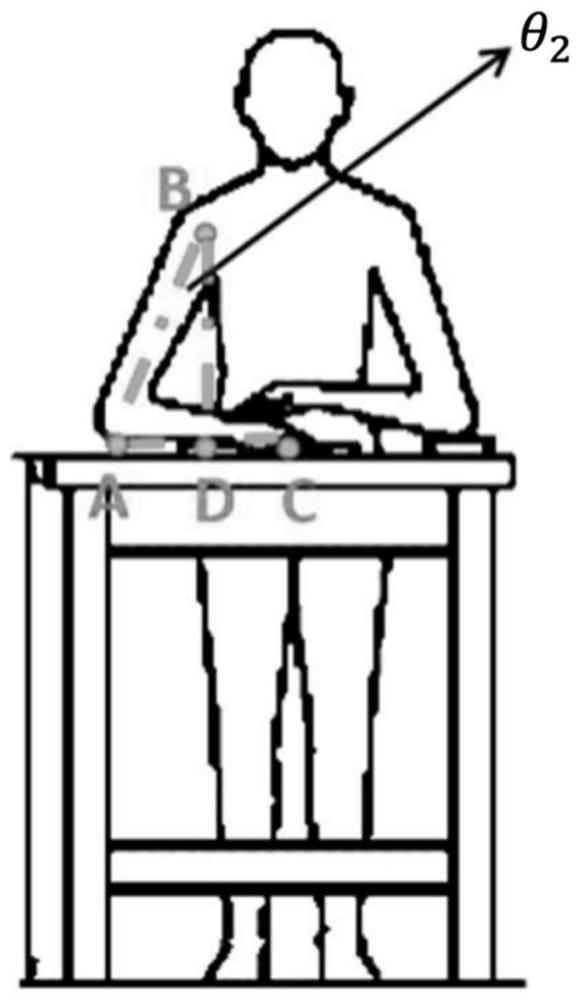
30、所述步骤b中,所述第一夹角为大臂与小臂在投影基准面上投影所构成的夹角θ1,所述投影基准面为人体侧面;所述第二夹角为大臂与躯干所构成的夹角θ2。
31、上述控制方法,还具有如下特点:
32、桌面高度h的上界计算公式:
33、
34、|bd|=l1*cosθ2;
35、桌面高度h的下界计算公式:
36、hmin=h-|bd|;
37、|bd|=l1*cosθ2
38、式中,|bd|代表bd的长度,h为肩膀点到地面的距离,l1为肩膀点到手肘点的距离。b点为肩膀点,d点为同侧手肘点在人体侧面的投影点。
39、上述控制方法,还具有如下特点:
40、桌面高度h的计算公式:
41、h=h-l1*sin(π-θ1)*cosθ2;
42、式中,h为肩膀点到地面的距离,l1为肩膀点到手肘点的距离。
43、上述控制方法,还具有如下特点:所述bd的长度、和/或θ1、和/或θ2由双目相机、深度相机或激光雷达测得。
44、上述控制方法,还具有如下特点:所述bd的长度和/或θ1由检测装置测得,所述检测装置设于人体投影基准面的外侧。
45、再一方面,本技术还提供了一种智能升降桌,包括采用如上所述的智能升降桌的控制方法进行控制的控制模块。
46、上述智能升降桌还具有如下特点:
47、还包括工作模式选择模块,
48、所述工作模式选择模块支持默认工作模式和定制工作模式;
49、所述定制工作模式支持站姿工作模式和坐姿工作模式,以及支持阅读工作模式、书写工作模式、键入工作模式和护颈工作模式;
50、所述控制模块用于根据所述工作模式选择模块,确定所述智能升降桌的目标高度数值。
51、上述智能升降桌还具有如下特点:
52、还包括数据后处理模块,
53、所述数据后处理模块用于分析用户的使用信息,并将分析结果输送给控制模块。
54、由此可见,与现有相关技术相比,本技术通过选定不同工作模式,匹配输出对应的第一预设范围和第二预设范围,来基于不同参比对象的比较结果确定目标高度数值,控制智能升降桌的动作,从而能够实现升降桌的智能控制,保证升降桌提供符合人体工学的桌面高度,有效降低疲劳。
55、本技术的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术而了解。本技术的其他优点可通过在说明书以及附图中所描述的方案来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!