一种水面机器人控制方法、平台、电子设备及介质
本发明涉及机器人单体-运动控制,特别是涉及一种水面机器人控制方法、平台、电子设备及介质。
背景技术:
1、随着人工智能技术的飞速发展和在多个领域的广泛应用,机器人正逐渐成为勘探、侦察任务中不可或缺的利器。这一趋势不仅源于人工智能在感知、决策和控制方面的突破,还受到了稳定性要求逐渐提升的背景影响。
2、在勘探领域,机器人借助先进的传感技术,能够在海洋、湖泊等水域进行高效的勘探活动。与传统的人工勘探相比,机器人具备更高的灵活性和自主性,能够覆盖更大的区域,获取更全面的数据信息。人工智能技术的引入使得机器人能够智能感知环境变化,自主规划勘探路径,实时分析数据,从而提高勘探效率和准确性。随着能源、地质等领域的不断发展,对于海洋、湖泊等水下资源的勘探需求不断增加,机器人在此方面具有巨大的应用潜力。
3、在侦察任务方面,机器人的应用也日益广泛。特别是在海上边境巡逻、海域监测等领域,机器人能够实现持续的、高效的监控工作,及时发现异常情况。借助人工智能的图像识别、目标跟踪等技术,机器人可以自动识别海上船只、气象变化等情况,为边境安全和海上交通管理提供重要支持。
4、水面机器人是一种高度自主的机器人,通过飞控gps信号定位和内置imu传感技术,能够在水面上按照预定航路点全自动航行,无需人工遥控。其在水上作业领域具备重要的安全和稳定性优势,可替代人员执行危险复杂的海上任务,包括地下勘探和环境信息采集,并将数据传回中控中心,从而显著提高了水上作业的安全性,同时也降低了人力成本。然而,随着任务复杂性的增加,对于机器人的稳定性要求也在逐步提高,现有水面机器人在应对复杂多变的水面环境时,往往受制于洋流、风力等干扰,存在抗干扰能力不足和运动补偿较为迟缓的问题。尤其是在干扰发生时,系统未能及时调整推进力和姿态值,影响了船只的运动稳定性。因此,如何提高机器人的运动鲁棒性、抗干扰能力以及运动补偿能力,成为了当前技术研究的关键问题。
5、为了提高机器人的运动鲁棒性,一般采用单体控制方法采取在线控a制的方案提高运动的精度和准确性,例如:1.苏黎世大学matthias团队通过简单的线性和二次空气阻力模型部分计算了非稳态和非线性流体动力效应,但这种建模通常计算成本很高,而且仅限于稳定的非动态条件。2.加州理工学院honig团队采用数据驱动的动力学建模,简化了控制模型,但是不能有效地适应变化未知的环境,如复杂噪声下的洋流和风力改变的情况。
6、综上所述,现有的单体控制方法的主要问题还是抗干扰能力不足和运动补偿较为迟缓。
技术实现思路
1、本发明的目的是提供一种水面机器人控制方法、平台、电子设备及介质,可快速学习环境干扰,进而加强了抗干扰以及运动补偿的能力。
2、为实现上述目的,本发明提供了如下方案:
3、一种水面机器人控制方法,包括:
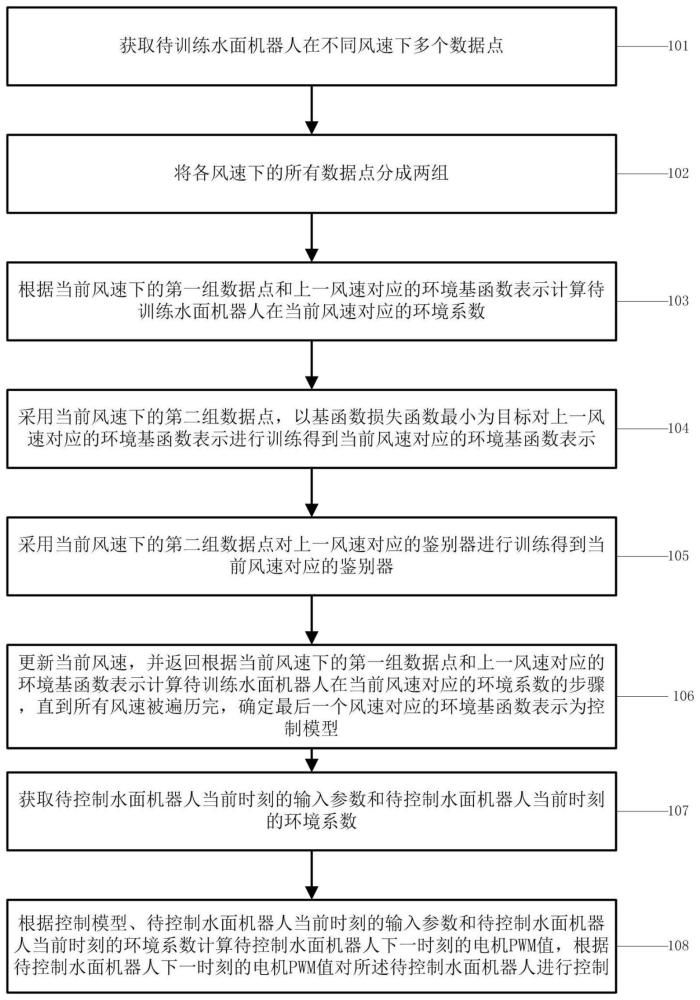
4、获取待训练水面机器人在不同风速下多个数据点,每个数据点均包括:输入参数和环境力大小;输入参数包括:速度、电机pwm值和姿态;
5、将各风速下的所有数据点分成两组;
6、根据当前风速下的第一组数据点和上一风速对应的环境基函数表示计算待训练水面机器人在当前风速对应的环境系数;
7、采用当前风速下的第二组数据点,以基函数损失函数最小为目标对上一风速对应的环境基函数表示进行训练得到当前风速对应的环境基函数表示;所述基函数损失函数基于上一风速对应的鉴别器和当前风速对应的环境系数确定;
8、采用当前风速下的第二组数据点对上一风速对应的鉴别器进行训练得到当前风速对应的鉴别器;
9、更新当前风速,并返回根据当前风速下的第一组数据点和上一风速对应的环境基函数表示计算待训练水面机器人在当前风速对应的环境系数的步骤,直到所有风速被遍历完,确定最后一个风速对应的环境基函数表示为控制模型;
10、获取待控制水面机器人当前时刻的输入参数和待控制水面机器人当前时刻的环境系数;
11、根据控制模型、待控制水面机器人当前时刻的输入参数和待控制水面机器人当前时刻的环境系数计算待控制水面机器人下一时刻的电机pwm值,根据待控制水面机器人下一时刻的电机pwm值对所述待控制水面机器人进行控制。
12、可选的,根据当前风速下的第一组数据点和上一风速对应的环境基函数表示计算待训练水面机器人在当前风速对应的环境系数,具体包括:
13、将当前风速下的第一组数据点中的输入参数分别输入上一风速对应的环境基函数表示,得到当前风速下的环境力大小矩阵;
14、根据当前风速下的第一组数据点中的环境力大小组成的矩阵以及当前风速下的环境力大小矩阵,采用最小二乘法对方程a=(φtφ)-1φty进行求解得到待训练水面机器人在当前风速对应的环境系数,其中,a表示待训练水面机器人在当前风速对应的环境系数,φ表示当前风速下的环境力大小矩阵,y表示当前风速下的第一组数据点中的环境力大小组成的矩阵,φt表示对φ求转置。
15、可选的,采用当前风速下的第二组数据点,以基函数损失函数最小为目标对上一风速对应的环境基函数表示进行训练得到当前风速对应的环境基函数表示,具体包括:
16、采用梯度下降法,以当前风速下的第二组数据点中的输入参数为输入,以当前风速下的第二组数据点中的环境力大小为输出,以基函数损失函数最小为目标,对上一风速对应的环境基函数表示进行训练,得到当前风速对应的环境基函数表示。
17、可选的,所述基函数损失函数,具体为:其中,l(φ)表示基函数损失函数,f(x)表示当前风速下的第二组数据点中的环境力大小,φ(x)表示将当前风速下的第二组数据点中的输入参数输入上一风速对应的环境基函数表示得到的环境力大小,a表示当前风速对应的环境系数,α表示梯度下降学习率,h(φ(x))表示将φ(x)输入上一风速对应的鉴别器得到的值,c表示当前风速,表示l2范数。
18、可选的,采用当前风速下的第二组数据点对上一风速对应的鉴别器进行训练得到当前风速对应的鉴别器,具体包括:
19、以当前风速下的第二组数据点中的输入参数输入上一风速对应的环境基函数表示得到的环境力大小为输入,以风速为输出,以鉴别器损失函数最小为目标,对鉴别器进行训练。
20、可选的,根据控制模型、待控制水面机器人当前时刻的输入参数和待控制水面机器人当前时刻的环境系数计算待控制水面机器人下一时刻的电机pwm值,具体包括:
21、将所述待控制水面机器人当前时刻的输入参数输入所述控制模型得到所述待控制水面机器人当前时刻环境力大小;
22、根据所述待控制水面机器人当前时刻环境力大小和待控制水面机器人当前时刻的环境系数得到待控制水面机器人当前时刻的环境力表示;
23、根据待控制水面机器人当前时刻的环境力表示和待控制水面机器人当前时刻的电机pwm值得到待控制水面机器人下一时刻的电机pwm值。
24、一种水面机器人控制平台,包括:
25、获取模块,用于获取待训练水面机器人在不同风速下多个数据点,每个数据点均包括:输入参数和环境力大小;输入参数包括:速度、电机pwm值和姿态;
26、分组模块,用于将各风速下的所有数据点分成两组;
27、环境系数计算模块,用于根据当前风速下的第一组数据点和上一风速对应的环境基函数表示计算待训练水面机器人在当前风速对应的环境系数;
28、基函数训练模块,用于采用当前风速下的第二组数据点,以基函数损失函数最小为目标对上一风速对应的环境基函数表示进行训练得到当前风速对应的环境基函数表示;所述基函数损失函数基于上一风速对应的鉴别器和当前风速对应的环境系数确定;
29、鉴别器训练模块,用于采用当前风速下的第二组数据点对上一风速对应的鉴别器进行训练得到当前风速对应的鉴别器;
30、控制模型确定模块,用于更新当前风速,并返回所述环境系数计算模块,直到所有风速被遍历完,确定最后一个风速对应的环境基函数表示为控制模型;
31、imu感知系统和定位模块,用于获取待控制水面机器人当前时刻的输入参数和待控制水面机器人当前时刻的环境系数;
32、计算及控制模块,用于根据控制模型、待控制水面机器人当前时刻的输入参数和待控制水面机器人当前时刻的环境系数计算待控制水面机器人下一时刻的电机pwm值,根据待控制水面机器人下一时刻的电机pwm值对所述待控制水面机器人进行控制。
33、可选的,所述待训练水面机器人和所述待控制水面机器人均为三栖机器人。
34、一种电子设备,包括:
35、存储器和处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述所述的水面机器人控制方法。
36、一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现如上述所述的水面机器人控制方法。
37、根据本发明提供的具体实施例,本发明公开了以下技术效果:
38、本发明将各风速下的所有数据点分成两组;根据当前风速下的第一组数据点和上一风速对应的环境基函数表示计算待训练水面机器人在当前风速对应的环境系数;采用当前风速下的第二组数据点,以基函数损失函数最小为目标对上一风速对应的环境基函数表示进行训练得到当前风速对应的环境基函数表示;采用当前风速下的第二组数据点对上一风速对应的鉴别器进行训练得到当前风速对应的鉴别器;直到所有风速被遍历完,确定最后一个风速对应的环境基函数表示为控制模型,可以有效、快速地以小样本学习的方式学习到环境干扰表示,进而加强抗干扰以及运动补偿的能力。
- 还没有人留言评论。精彩留言会获得点赞!