一种智慧井盖监控设备、系统及方法与流程
本发明涉及智慧井盖,特别是涉及一种智慧井盖监控设备、系统及方法。
背景技术:
1、井盖作为城市资产的重要组成部分,被形象称为“城市纽扣”。如不能有效加强监管、维护,就可能演化为城市中的一个个地雷、陷阱,成为敞开的虎口。推进信息化建设、推进新技术应用和创新窨井盖安全管理模式都刻不容缓。多地运用5g、人工智能、大数据和云计算等新技术,逐步实现基于传感器和物联网的管理创新,提升窨井盖安全管理效率和水平,建立城市数字化智能井盖系统。目前绝大多数设备都仅使用一个单片机控制设备运行和4g模块通讯,主控芯片成本较高。
技术实现思路
1、本发明的目的是提供一种智慧井盖监控设备、系统及方法,能够降低对单个芯片的计算力要求,从而在保证井盖监控效果的前提下,降低制备成本。
2、为实现上述目的,本发明提供了如下方案:
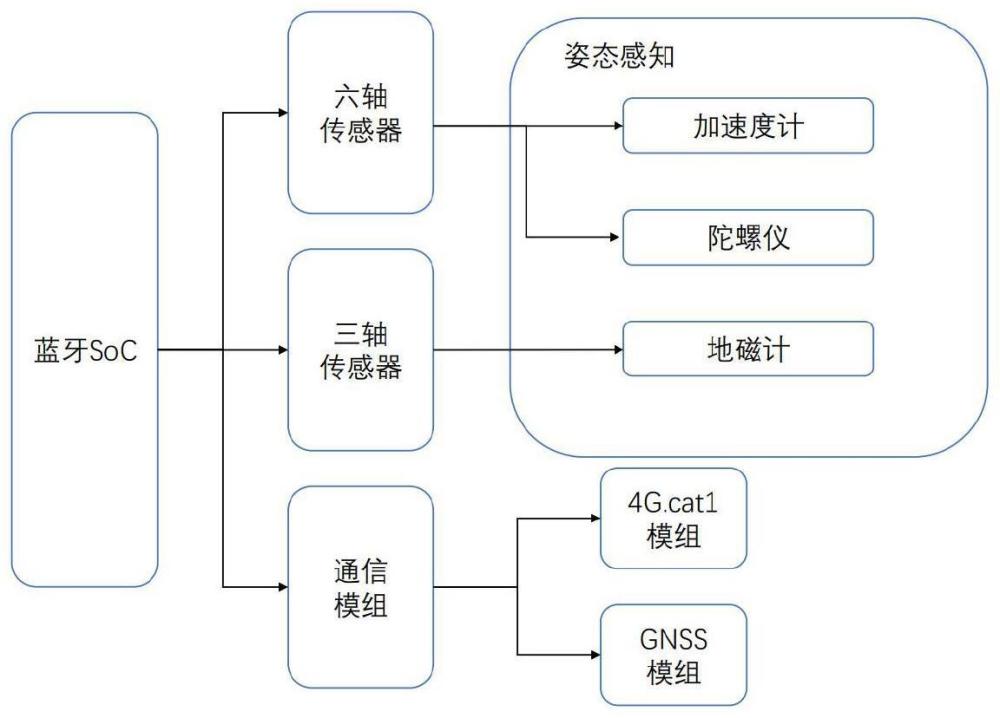
3、一种智慧井盖监控设备,包括:
4、传感器组、蓝牙soc芯片、4g模块和双模gnss定位模组;
5、所述传感器组与云平台连接;
6、所述传感器组、所述4g模块和所述双模gnss定位模组均与所述蓝牙soc芯片连接;
7、所述4g模块还与所述云平台连接;
8、所述传感器组设置于对应井盖上;
9、所述传感器组包括三轴加速度计、三轴陀螺仪和三轴地磁计;
10、所述三轴加速度计用于按照预设频率获取井盖加速度值;
11、所述三轴陀螺仪在接收到第一唤醒指令时开启;所述第一唤醒指令是蓝牙soc芯片在井盖加速度值大于井盖加速度阈值时生成的;
12、所述三轴地磁计、所述蓝牙soc芯片、所述4g模块和所述双模gnss定位模组均在接收到第二唤醒指令时开启;所述第二唤醒指令是蓝牙soc芯片在井盖角度值大于井盖松动阈值时生成的;所述井盖角度值是对所述三轴加速度计和所述三轴陀螺仪的测量数据进行滤波处理后得到的;
13、所述双模gnss定位模组用于获取井盖位置;
14、所述传感器组用于获取井盖姿态;
15、所述蓝牙soc芯片用于根据井盖位置和井盖姿态确定井盖风险状态;
16、所述4g模块与将对应井盖的位置和所述井盖风险状态发送至云平台。
17、一种智慧井盖监控系统,包括:
18、云平台和多个所述的智慧井盖监控设备;
19、所述智慧井盖监控设备与待测区域内的井盖一一对应设置。
20、一种智慧井盖监控方法,所述方法应用于所述的一种智慧井盖监控设备,方法包括:
21、获取井盖位置和井盖姿态;
22、根据井盖位置和井盖姿态确定井盖风险状态。
23、可选的,在获取井盖位置和井盖姿态之前,还包括:
24、控制三轴加速度计按照预设频率获取井盖加速度值;
25、在接收到第一唤醒指令时开启三轴陀螺仪,对所述三轴加速度计和所述三轴陀螺仪的测量数据进行滤波处理后得到井盖角度值;所述第一唤醒指令是蓝牙soc芯片在井盖加速度值大于井盖加速度阈值时生成的;
26、在井盖角度值小于井盖松动阈值时,判定井盖风险状态为“常规振动”,并生成三轴陀螺仪关闭指令,返回步骤“控制三轴加速度计按照预设频率获取井盖加速度值”;
27、在井盖角度值达到于井盖松动阈值时,生成第二唤醒指令开启三轴地磁计、蓝牙soc芯片、4g模块和双模gnss定位模组。
28、可选的,根据井盖位置和井盖姿态确定井盖风险状态,包括:
29、在井盖位移等于0且当前时刻井盖角度值处于井盖松动阈值和井盖开启阈值之间时,获取下一时刻井盖角度值;井盖松动阈值小于井盖开启阈值;
30、在井盖位移等于0且下一时刻井盖角度值小于井盖松动阈值时,判定井盖风险状态为“松动状态且可恢复”,监测下一时刻后井盖角度值,并向云平台上报井盖风险状态和下一时刻后的最大井盖角度值;
31、在井盖位移等于0且下一时刻井盖角度值处于井盖松动阈值和井盖开启阈值之间时,判定井盖风险状态为“松动状态且不可恢复”,监测下一时刻后井盖角度值,并向云平台上报井盖风险状态和下一时刻后的最大井盖角度值。
32、可选的,根据井盖位置和井盖姿态确定井盖风险状态,还包括:
33、在井盖位移等于0且当前时刻井盖角度值大于井盖开启阈值之间时,确定当前时刻为井盖开启时刻;
34、获取井盖开启时刻后第一预设时间段内按照预设频率获取井盖位移值,并确定井盖开启时刻后第一预设时间段后一时刻的井盖角度值为验证井盖角度值;
35、判断第一预设时间段内的多个井盖位移值是否均为0,得到第一判断结果;
36、若第一判断结果为是,则在井盖位移等于0且验证井盖角度值达到井盖开启阈值时,判定井盖风险状态为“井盖开启后未关闭”;向云平台上报井盖位置、井盖风险状态和异常报警信号;
37、在井盖位移等于0且验证井盖角度值小于井盖松动阈值时,判定井盖风险状态为“井盖开启且在短时间内被关闭”;向云平台上报井盖位置、井盖风险状态、井盖开启时刻以及井盖开启时刻的井盖角度值。
38、可选的,根据井盖位置和井盖姿态确定井盖风险状态,还包括:
39、若第一判断结果为否,则确定井盖开启时刻后第一预设时间段后一时刻的井盖位移值为验证井盖位移值;
40、判断验证井盖位移值是否为0,得到第二判断结果;
41、若第二判断结果为是,则判断验证井盖角度值是否为0,得到第三判断结果;
42、若第三判断结果为是,则判定井盖风险状态为“井盖被移动且已恢复原位”;
43、若第三判断结果为否,则判定井盖风险状态为“井盖打开移动后放回原位但未正确关闭”,并向云平台上报井盖风险状态。
44、可选的,根据井盖位置和井盖姿态确定井盖风险状态,还包括:
45、若第三判断结果为否,则判断验证井盖位移值是否小于位移阈值,得到第四判断结果;
46、若第四判断结果为是,则判定井盖风险状态为“井盖被移动且未恢复原位”,并向云平台上报井盖风险状态;
47、若第四判断结果为否,则判定井盖风险状态为“井盖被长距离移动”并确定验证井盖位移值获取时刻后第二预设时间段后一时刻的井盖位移值为验证丢失井盖位移值;
48、在验证丢失井盖位移值不等于0时,判定井盖风险状态为“井盖丢失”,并向云平台上报井盖风险状态。
49、根据本发明提供的具体实施例,本发明公开了以下技术效果:
50、本发明提供的一种智慧井盖监控设备、系统及方法,基于imu与北斗定位的智慧井盖设备与井盖状态判断模型,该设备采用蓝牙soc与4g模块双核协同控制设备运转,蓝牙soc完成传感器的工作控制、信息采集、多传感器信息融合、位移监测、姿态识别算法运算。4g模块接收蓝牙soc采集的传感器信息、接收姿态识别算法运算结果以及向云平台发送设备信息。而本发明设计的双核协同控制办法使得设备运行控制被分摊到蓝牙soc和4g模块两部分,主控芯片的工作压力更小,从而可以使用成本更低的主控芯片来替代高成本主控芯片,实现成本降低的同时,避免了设备性能的降低。
- 还没有人留言评论。精彩留言会获得点赞!