高分辨率大斜视星载SAR天线波束二维扫描控制方法及系统
本发明涉及合成孔径雷达卫星总体设计领域,具体地,涉及一种高分辨率大斜视星载sar天线波束二维扫描控制方法及系统。
背景技术:
1、星载合成孔径雷达(sar,synthet ic aperture radar)利用电磁波的穿透性和不受暗夜条件限制的特点,可实现全天时、全天候对地观测。方位向采用合成孔径技术实现高分辨率成像,即为了实现目标沿航迹向的聚焦,每个像素均需积累一定的合成孔径角度。角度积累越大,分辨率越高。对于机载sar成像或低轨低分辨率成像的星载sar,一般有两个近似,即sar飞行轨迹的直线近似和地面目标区域的平面近似。由于上述两种条件下的合成孔径时间或角度都很小,这种近似可以接受,且天线波束按照成像坐标系进行方位向和俯仰向两维扫描,恰恰与地面成像带的方位向(平行于航迹)和正侧视距离向一致,波束两维控制规律可简化。例如,刘澹提出了一种微带阵列天线及二维波束控制方法,符合以上思想,但不适合星载高分辨率大斜视成像。但是对于高分辨率星载sar和大斜视成像星载sar,以上两种近似不再成立,天线的方位向、俯仰向与成像带的方位向、距离向关系复杂,二者坐标系相对关系因轨道弯曲和地形弯曲而发生了旋转,经典扫描控制规律不在适用。孙光才,刘力媛,邓玉辉等提出了一种对大幅宽区域快速成像的sar二维波束扫描方法,解决了scansar、topsar模式的多子带拼接,但拼接精度要求不高,且该方法仅适用于低分辨率模式的sar成像。徐伟,李昊洋提出了一种星载雷达二维波束扫描控制方法及装置,虽然给出了两维角度计算的显性公式,但对于在球面几何条件下的大幅宽目标区域不再适用。高分辨率大斜视星载sar天线波束二维扫描控制缺少合适的方法。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种高分辨率大斜视星载sar天线波束二维扫描控制方法及系统。
2、根据本发明提供的一种高分辨率大斜视星载sar天线波束二维扫描控制方法,包括:
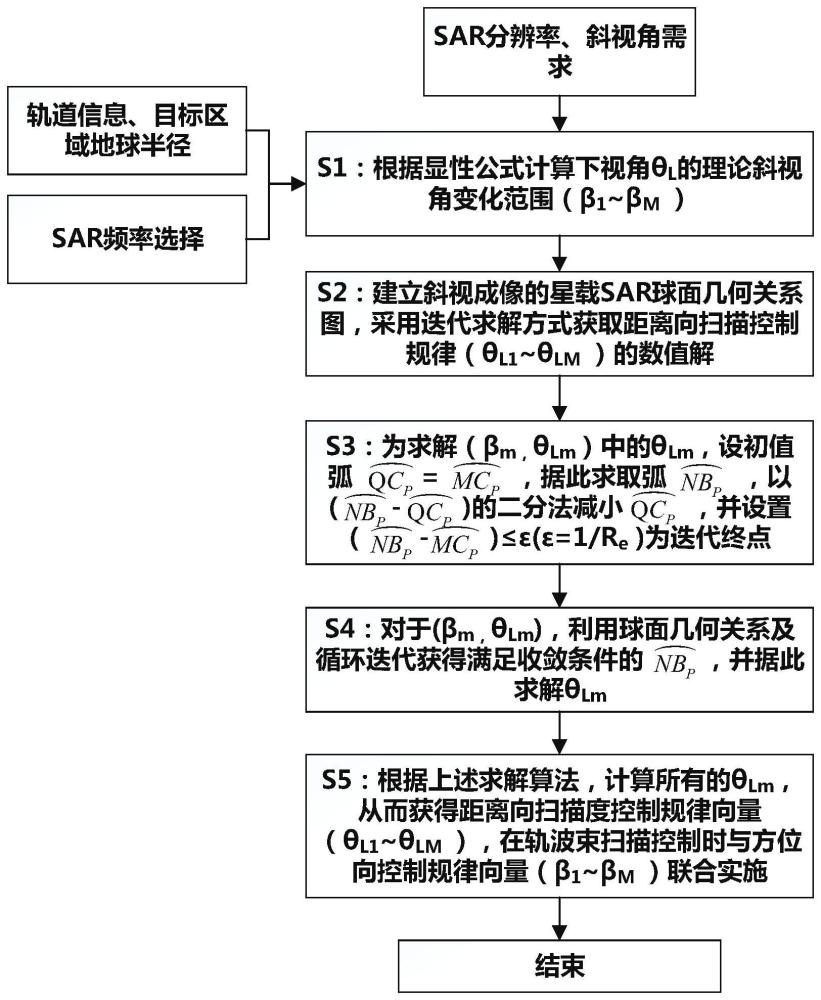
3、计算下视角θl的理论斜视角变化范围(β1~βm);
4、建立斜视成像的星载sar球面几何关系图,采用迭代求解方式获取距离向扫描控制规律(θl1~θlm)的数值解,从而获得距离向扫描度控制规律向量(θl1,θl2,…,θlm);
5、在轨波束扫描控制时,将距离向扫描度控制规律向量(θl1,θl2,…,θlm)与方位向控制规律向量(β1,β2,…,βm)联合实施。
6、优选地,所述计算下视角θl的理论斜视角变化范围(β1~βm),包括:
7、设计满足分辨率的波束方位向扫描角度;
8、将波束方位向扫描角度均匀数值化,形成方位向扫描控制规律向量(β1,β2,…,βm)。
9、优选地,
10、针对聚束sar,分辨率和波束方位向扫描角度关系:
11、
12、其中,vg表示波束地速,vs表示卫星飞行速度,λ表示波长,βsyn表示波束方位向扫描角度范围。
13、优选地,所述建立斜视成像的星载sar球面几何关系图,采用迭代求解方式获取距离向扫描控制规律(θl1~θlm)的数值解,包括:
14、建立大斜视成像的球面几何和星地几何关系,定义c为卫星位置,轨道高度为h,地球半径为re,cp为星下点,bp、cp所在的球面圆为星下点轨迹,m、n所在的球面圆为波束扫描至视角θl对应的地面轨迹,q、n所在的球面圆为在cq延长线上并与面cmcp垂直的球冠截面,m为正侧视视角θl对应的地面目标点位置,q为正侧视视角θl1对应的地面目标点位置,n为斜视角β对应的地面目标点位置,和垂直于ocpbp;
15、根据星载sar成像坐标系下波束两维扫描的正交关系,将方位向扫描控制规律向量(β1,β2,…,βm)作为输入变量,求解不同方位扫描角度下的距离向扫描角度θlm。
16、优选地,所述建立斜视成像的星载sar球面几何关系图,采用迭代求解方式获取距离向扫描控制规律(θl1~θlm)的数值解,包括:
17、使初值弧并由此迭代减小,每次循环后的减小
18、设定迭代收敛门限ε,收敛的条件公式为
19、对于视角θl和θl1,根据星地几何关系以及三角函数公式,可求得两者对应的斜距:
20、rs=resin(θinc-θl)/sin(θl)
21、rs1=resin(θinc1-θl1)/sin(θl1)
22、其中,θinc和θinc1分别为θl和θl1对应的入射角;
23、在三角形oo1c及以o1为圆心的球冠截面中,计算球冠圆截面的半径:
24、re1=(re+h)cos(θl1)-rs1
25、在三角形no1c,利用三角函数和球面几何关系可求出n点对应的斜视斜距rsq以及球面弧长
26、rsq=re1sin(∠no1c)/sin(βm)
27、
28、其中,∠no1c=asin[(re1+rs1)/re1sin(βm)]-βm;asin()是一个整体,表示反正弦函数;
29、在三角形cno和大球面中,根据球面几何和三角函数关系,获得球面弧长
30、
31、其中,acos()是一个整体,表示反余弦函数;
32、在球面三角形qncp中,令∠a=∠ncpq,可求得∠ncpbp;
33、
34、其中∠a=∠ncpq=acos((cos(a)-cos(b)cos(c))/(sin(b)sin(c)));
35、在球面三角形nbpcp中,则根据球面三角公式可求出
36、
37、进行多轮迭代,直至满足收敛条件,此时的θl1为所求θlm。
38、优选地,所述将距离向扫描度控制规律向量(θl1,θl2,…,θlm)与方位向控制规律向量(β1,β2,…,βm)联合实施,包括:
39、推导目标点的方位斜视视角θlsqm及其斜视距离入射角θincsqm:
40、
41、θincsqm=asin((re+h)/resin(θlsqm))
42、其中,re表示地球半径,rsq表示点n与点c之间连线的长度,表示在球面以点n和点cp为端点的弧长,h表示轨道高度。
43、根据本发明提供的一种高分辨率大斜视星载sar天线波束二维扫描控制系统,包括:
44、斜视角计算模块,用于计算下视角θl的理论斜视角变化范围(β1~βm);
45、距离向扫描度控制规律向量模块,用于建立斜视成像的星载sar球面几何关系图,采用迭代求解方式获取距离向扫描控制规律(θl1~θlm)的数值解,从而获得距离向扫描度控制规律向量(θl1,θl2,…,θlm);
46、联合实施模块,用于在轨波束扫描控制时,将距离向扫描度控制规律向量(θl1,θl2,…,θlm)与方位向控制规律向量(β1,β2,…,βm)联合实施。
47、优选地,所述计算下视角θl的理论斜视角变化范围(β1~βm),包括:
48、设计满足分辨率的波束方位向扫描角度;
49、将波束方位向扫描角度均匀数值化,形成方位向扫描控制规律向量(β1,β2,…,βm);针对聚束sar,分辨率和波束方位向扫描角度关系:
50、
51、其中,vg表示波束地速,vs表示卫星飞行速度,λ表示波长,βsyn表示波束方位向扫描角度范围。
52、优选地,所述建立斜视成像的星载sar球面几何关系图,采用迭代求解方式获取距离向扫描控制规律(θl1~θlm)的数值解,包括:
53、建立大斜视成像的球面几何和星地几何关系,定义c为卫星位置,轨道高度为h,地球半径为re,cp为星下点,bp、cp所在的球面圆为星下点轨迹,m、n所在的球面圆为波束扫描至视角θl对应的地面轨迹,q、n所在的球面圆为在cq延长线上并与面cmcp垂直的球冠截面,m为正侧视视角θl对应的地面目标点位置,q为正侧视视角θl1对应的地面目标点位置,n为斜视角β对应的地面目标点位置,和垂直于ocpbp;
54、根据星载sar成像坐标系下波束两维扫描的正交关系,将方位向扫描控制规律向量(β1,β2,…,βm)作为输入变量,求解不同方位扫描角度下的距离向扫描角度θlm;
55、所述建立斜视成像的星载sar球面几何关系图,采用迭代求解方式获取距离向扫描控制规律(θl1~θlm)的数值解,包括:
56、使初值弧并由此迭代减小,每次循环后的减小
57、设定迭代收敛门限ε,收敛的条件公式为
58、对于视角θl和θl1,根据星地几何关系以及三角函数公式,可求得两者对应的斜距:
59、rs=resin(θinc-θl)/sin(θl)
60、rs1=resin(θinc1-θl1)/sin(θl1)
61、其中,θinc和θinc1分别为θl和θl1对应的入射角;
62、在三角形oo1c及以o1为圆心的球冠截面中,计算球冠圆截面的半径:
63、re1=(re+h)cos(θl1)-rs1
64、在三角形no1c,利用三角函数和球面几何关系可求出n点对应的斜视斜距rsq以及球面弧长
65、rsq=re1sin(∠no1c)/sin(βm)
66、
67、其中,∠no1c=asin[(re1+rs1)/re1sin(βm)]-βm;asin()是一个整体,表示反正弦函数;
68、在三角形cno和大球面中,根据球面几何和三角函数关系,获得球面弧长
69、
70、其中,acos()是一个整体,表示反余弦函数;
71、在球面三角形qncp中,令∠a=∠ncpq,可求得∠ncpbp;
72、
73、其中∠a=∠ncpq=acos((cos(a)-cos(b)cos(c))/(sin(b)sin(c)));
74、在球面三角形nbpcp中,则根据球面三角公式可求出
75、
76、进行多轮迭代,直至满足收敛条件,此时的θl1为所求θlm。
77、优选地,所述将距离向扫描度控制规律向量(θl1,θl2,…,θlm)与方位向控制规律向量(β1,β2,…,βm)联合实施,包括:
78、推导目标点的方位斜视视角θlsqm及其斜视距离入射角θincsqm:
79、
80、θincsqm=asin((re+h)/resin(θlsqm))
81、其中,re表示地球半径,rsq表示点n与点c之间连线的长度,表示在球面以点n和点cp为端点的弧长,h表示轨道高度。
82、与现有技术相比,本发明具有如下的有益效果:
83、本发明通过星地几何、球面几何的数学建模和公式推导,结合基于二分法的数值迭代,实现了星载sar大斜视成像天线波束二维扫描精确控制处理,有效解决了星载sar大斜视成像天线波束扫描的二维耦合严重、分离困难等问题,从而有效克服了传统一维扫描近似模型精度差的问题。
- 还没有人留言评论。精彩留言会获得点赞!