基于天宇协议的无人机环绕飞行方法与流程
本发明涉及无人机控制,尤其涉及无人机的环绕飞行控制。
背景技术:
1、目前,大疆无人机的使用通常依赖于天宇4g盒子进行飞行控制;其中天宇4g盒子对外的接口协议为天宇协议,关于天宇协议具体参见以下网址介绍:
2、http://document.wogrid.com/indexv2.html#wow48。
3、从天宇协议的介绍可知,现有的天宇协议中并未提供环绕飞行的接口。
4、环绕飞行是以目标为中心,无人机围着它转圈拍摄,如果是纯手动操控飞行器环绕拍摄,难度较高。环绕飞行可以用来检验无人机在对目标点实施全方位、多角度的空中侦查(拍摄)时的表现,尤其对于无人机的新手玩家更是如此。
5、对于无人机的新手玩家而言,需要通过环绕飞行的方式来检验无人机的全方位侦查性能以及无人机设备功能的完整性,然而无人机的新手玩家往往不具有手动操控无人机进行环绕拍摄的能力,同时只能通过天宇协议控制无人机飞行,且天宇协议中并未提供环绕飞行的接口,这就导致难以对无人机的全方位侦查性能进行检验。所以基于天宇协议实现无人机的环绕飞行功能,是本领域技术人员一直想要解决的技术难题。
6、然而,虽然市面上有许多环绕飞行的算法,例如:公开号为“cn115729256a”的专利文献公开了“无人机的环绕飞行方法、系统、终端设备以及存储介质”,公开号为“cn112684810a”的专利文献公开了“一种固定翼无人机环绕飞行的导航方法”,这些环绕飞行的算法均不能应用于天宇协议中,不能解决上述技术难题。
技术实现思路
1、本发明提出了基于天宇协议的无人机环绕飞行方法,解决了现有天宇协议中未提供环绕飞行接口的问题。
2、本发明所述的基于天宇协议的无人机环绕飞行方法,其技术方案如下:
3、所述方法包括以下步骤:
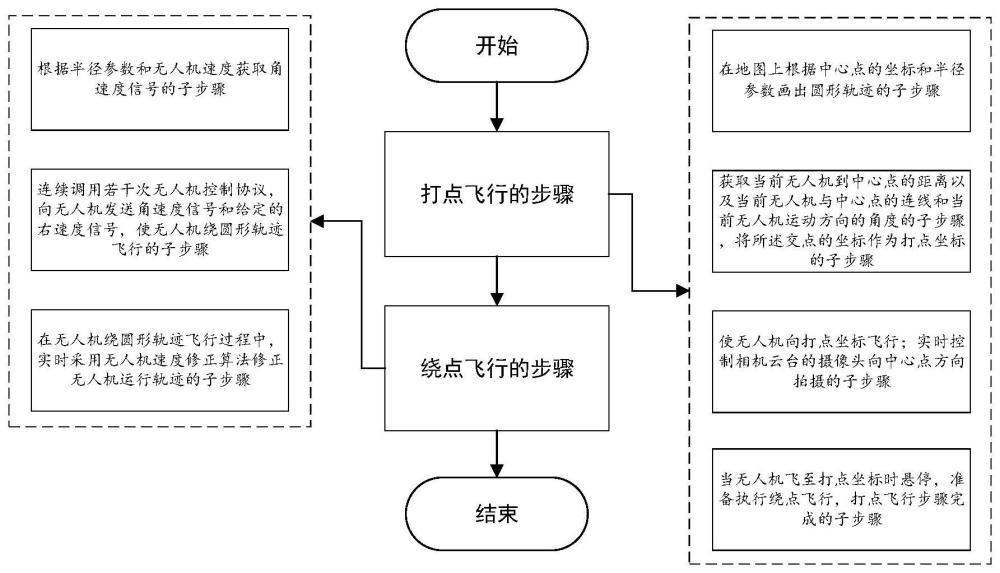
4、打点飞行的步骤,其包括以下子步骤:
5、在地图上根据中心点的坐标和半径参数画出圆形轨迹的子步骤;
6、获取当前无人机位置的坐标,并根据当前无人机位置的坐标和中心点的坐标,获取当前无人机到中心点的距离以及当前无人机与中心点的连线和当前无人机运动方向的夹角的子步骤;
7、获取当前无人机与中心点的连线和圆形轨迹的交点,将所述交点的坐标作为打点坐标的子步骤;
8、调用天宇协议中的无人机控制协议,根据当前无人机到中心点的距离以及当前无人机与中心点的连线和当前无人机运动方向的夹角,控制无人机向打点坐标飞行,同时实时获取相机云台的俯仰角度,并实时控制相机云台的摄像头向中心点方向拍摄的子步骤;
9、当无人机飞至打点坐标时悬停,准备执行绕点飞行,打点飞行步骤完成的子步骤;
10、绕点飞行的步骤,其包括以下子步骤:
11、根据半径参数和无人机速度获取角速度信号的子步骤;
12、连续调用若干次无人机控制协议,向无人机发送角速度信号和给定的右速度信号,使无人机绕圆形轨迹飞行的子步骤;
13、在无人机绕圆形轨迹飞行过程中,实时采用无人机速度修正算法修正无人机运行轨迹的子步骤;
14、当无人机绕圆形轨迹至少飞行一周后,绕点飞行步骤完成的子步骤。
15、进一步的,提供一个优选实施方式,所述连续调用若干次无人机控制协议的步骤中:
16、每调用一次无人机控制协议,无人机运行100ms。
17、进一步的,提供一个优选实施方式,所述连续调用若干次无人机控制协议的步骤中:
18、若无人机绕圆形轨迹飞行一周,则调用次数为无人机绕圆形轨迹飞行一周所用时间除以100ms。
19、进一步的,提供一个优选实施方式,所述实时采用无人机速度修正算法修正无人机运行轨迹的步骤为:
20、当无人机与中心点的距离小于半径参数时,给无人机提供一个后速度进行修正;
21、当无人机与中心点的距离大于半径参数时,给无人机提供一个前速度进行修正。
22、本发明还提出了基于天宇协议的无人机环绕飞行装置,其技术方案如下:
23、所述装置包括以下模块:
24、打点飞行的模块,其包括以下子模块:
25、在地图上根据中心点的坐标和半径参数画出圆形轨迹的子模块;
26、获取当前无人机位置的坐标,并根据当前无人机位置的坐标和中心点的坐标,获取当前无人机到中心点的距离以及当前无人机与中心点的连线和当前无人机运动方向的夹角的子模块;
27、获取当前无人机与中心点的连线和圆形轨迹的交点,将所述交点的坐标作为打点坐标的子模块;
28、调用天宇协议中的无人机控制协议,根据当前无人机到中心点的距离以及当前无人机与中心点的连线和当前无人机运动方向的夹角,控制无人机向打点坐标飞行,同时实时获取相机云台的俯仰角度,并实时控制相机云台的摄像头向中心点方向拍摄的子模块;
29、当无人机飞至打点坐标时悬停,准备执行绕点飞行,打点飞行步骤完成的子模块;
30、绕点飞行的模块,其包括以下子模块:
31、根据半径参数和无人机速度获取角速度信号的子模块;
32、连续调用若干次无人机控制协议,向无人机发送角速度信号和给定的右速度信号,使无人机绕圆形轨迹飞行的子模块;
33、在无人机绕圆形轨迹飞行过程中,实时采用无人机速度修正算法修正无人机运行轨迹的子模块;
34、当无人机绕圆形轨迹至少飞行一周后,绕点飞行步骤完成的子模块。
35、本发明还提出了一种计算机程序产品,其技术方案如下:
36、一种计算机程序产品,包括:处理器和存储器,所述存储器用于存储所述处理器的可执行指令,所述处理器配置为经由执行所述可执行指令来执行上述的基于天宇协议的无人机环绕飞行方法。
37、本发明还提出了一种计算机存储介质,其技术方案如下:
38、一种计算机存储介质,所述存储介质中存储有计算机程序,所述计算机程序运行时,执行上述的基于天宇协议的无人机环绕飞行方法。
39、本发明有以下有益效果:
40、1、本发明所述的基于天宇协议的无人机环绕飞行方法,基于现有天宇协议进行改进,提出了一种无人机环绕飞行的方法,填补了天宇协议的空白,克服了天宇协议不支持环绕飞行的技术难题,使得用户可以方便地实现无人机环绕飞行的功能。
41、2、本发明所述的基于天宇协议的无人机环绕飞行方法,是一种高效、稳定的环绕飞行方法(算法),能够确保无人机在飞行过程中保持良好的姿态和路径控制,进而按照设定的路径进行环绕飞行。
42、3、本发明所述的基于天宇协议的无人机环绕飞行方法,通过对改进现有天宇协议和设计环绕飞行方法,实现了与现有硬件设备的兼容,利用现有硬件设备(如天宇4g盒子),无需额外增加硬件成本,即可实现无人机的环绕飞行,提高了设备的利用率,同时为用户提供了更加丰富的飞行体验,具有广阔的应用前景和经济效益。
43、4、本发明所述的基于天宇协议的无人机环绕飞行方法,结合无人机控制协议(即天宇协议),实现了飞行路径的动态调整,提高了无人机的适应性和稳定性。
44、5、本发明所述的基于天宇协议的无人机环绕飞行方法,考虑了风力等外部环境因素对无人机飞行的影响,通过速度修正算法实现了更精准的飞行控制。
45、6、本发明所述的基于天宇协议的无人机环绕飞行方法简单有效,能够基于天宇协议实现无人机在地图上按照指定圆的轨迹进行环绕飞行。
46、7、本发明所述的基于天宇协议的无人机环绕飞行方法,具有飞行路径规划精准、飞行稳定性高、用户操作简便等优点,能够满足不同用户对无人机环绕飞行功能的需求。
47、本发明所述的基于天宇协议的无人机环绕飞行方法,适用于控制无人机定点环绕飞行。
- 还没有人留言评论。精彩留言会获得点赞!