一种带电作业遥控搭接车控制系统的制作方法
本发明涉及电网机器人控制的,更具体地说,它涉及一种带电作业遥控搭接车控制系统。
背景技术:
1、配电系统末端是电力系统中至关重要的一环,直接影响到电力持续供给的稳定性和可靠性。为了降低配网停电时间、提高供电可靠性和服务水平,以及保障带电作业人员的人身安全,降低作业劳动强度,提高作业效率和自动化水平,配网带电作业机器人的应用具有重要意义。然而,目前现有的带电作业机器人的控制方式主要依赖于操作手柄进行远程控制,这在一定程度上限制了作业的灵活性和效率。
2、例如公告号cn 109434826 a,一种带电作业机器人控制系统,其通过采用的路径规划、选择系统,事先存储了无障碍情况下的简单动作序列库和有障碍情况下的简单动作序列库,遇到实际情况时与序列库中的情况对比,选择合适的动作组合,提高了应对复杂情况的灵活性,并且序列库有较强的植入性,可以及时补充新的动作,提高路径规划的效率,由于规划路径的多样性,引入路径选择模块,能够从中筛选出高效的工作路径;能够实时监控作业环境,工作人员能够根据实际环境,对主操作手做出正确动作,提高作业质量,并能进行实时观察,发生突发情况时可以立即停止系统,增加容错率。
3、公告号cn110900600a,一种带电作业机器人的远程遥控控制系统及其控制方法,该可以同时控制机械臂移动和转动,实现对带电作业机器人的全方位控制,保证带电作业机器人工作的灵活性和安全性。
4、上述现有技术当中系统中的信息采集和实时计算处理,而机械臂需要及时响应并执行控制指令。如果系统的处理速度不够快或者通信延迟较大,可能会导致作业过程中的延迟,影响作业效率和实时性。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种提高信息处理精准度,从而确保施工安全,提高效率的带电作业遥控搭接车控制系统。
2、为实现上述目的,本发明提供了如下技术方案:
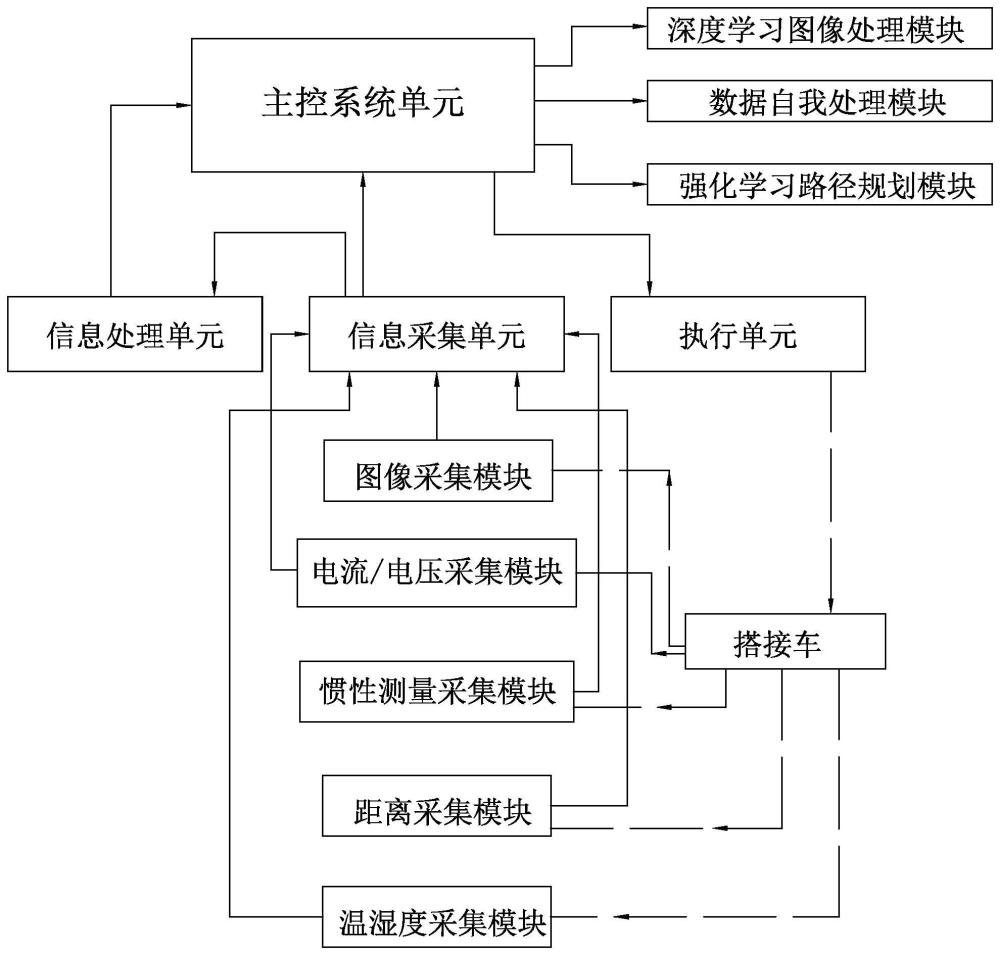
3、一种带电作业遥控搭接车控制系统,包括主控系统单元、信息处理单元、信息采集单元和执行单元,
4、信息采集单元包括图像采集模块、电流/电压采集模块、惯性测量采集模块、距离采集模块、温湿度采集模块,
5、信息处理单元根据信息采集单元内各个采集模块的输入信号来通过自动算法将信号缓存后发送至主控制系统,
6、执行单元用于接收主控系统的命令后执行搭接车受到的各个动态命令,
7、主控系统包括深度学习图像处理模块、数据自我处理模块、强化学习路径规划模块。
8、本发明进一步设置为:所述自动算法包括:
9、数据处理和缓存模块,其对从各个采集模块获取的原始数据进行处理;
10、数据融合模块,将来自不同采集模块的数据整合在一起,形成更完整、更全面的信息;
11、异常检测和处理模块,监测输入信号中的异常情况,并采取相应的处理措施;
12、通信协议处理模块,处理与主控制系统之间的通信协议,确保数据能够正确地发送到主控制系统;
13、数据优化和压缩模块,对数据进行优化和压缩,以减少通信带宽的占用,并提高数据传输的效率。
14、本发明进一步设置为:数据处理和缓存模块具体包括
15、数据滤波,去除噪声或异常数据,以提高数据质量;
16、数据校准,对数据进行校准,使其符合实际测量标准;
17、数据转换,将不同格式的数据进行转换,以便后续处理或与其他数据进行比较;
18、数据缓存,将处理后的数据暂时存储起来,以备后续发送至主控制系统或其他用途。
19、本发明进一步设置为:所述数据融合模块具有包括:
20、数据关联,将不同传感器采集的数据与特定事件或情境关联起来,
21、数据融合,将来自不同传感器的数据进行融合,以获取更全面的信息,
22、数据校正,根据多个传感器的数据进行校正,提高数据的准确性和可靠性。
23、本发明进一步设置为:异常检测和处理模块包括
24、异常检测,检测是否存在异常数据或传感器故障。
25、异常处理,对检测到的异常进行识别和处理,可能包括报警、数据修正、自动重启传感器等。
26、本发明进一步设置为:所述数据优化和压缩模块具体包括
27、数据压缩,对数据进行压缩,减少数据传输的带宽占用;
28、数据精简,精简数据格式,减少额外信息的传输;
29、数据优先级管理,根据数据的重要性或紧急程度进行优先级管理,以确保关键数据能够及时传输。
30、本发明进一步设置为:所述数据自我处理模块具体算法模型如下:
31、设定符号具体表示为,
32、: 第 个时刻的原始传感器数据;
33、 : 经过滑动窗口平均滤波后的数据;
34、: 经过卡尔曼滤波后的状态估计;
35、 经过卡尔曼滤波后的状态协方差矩阵;
36、初始化卡尔曼滤波的状态估计 和状态协方差矩阵 、滑动窗口的大小和自适应参数
37、对每个时刻,先进行滑动窗口平均滤波,得到 将作为观测值,输入到卡尔曼滤波器中进行处理。
38、滑动窗口平均滤波:
39、卡尔曼滤波:
40、预测步骤,
41、
42、更新步骤,
43、
44、自适应参数更新:( )
45、滑动窗口大小调节:。
46、本发明进一步设置为:强化学习路径规划模块的具有数学模型包括
47、状态空间s,s包括所有可能的状态,描述了搭接车环境的特征,如搭接车位置、速度、姿态;
48、动作空间a,a包括所有可能的动作,描述了搭接车可执行的操作,如加速、减速、转向;
49、状态转移概率表示在执行动作后,从状态转移到状态的概率分布;
50、奖励函数 表示在执行动作后,从状态转移到 状态的奖励值;
51、选择深度q网络(dqn)算法,在学习过程中在每个时间步,智能体根据当前状态选择动作,环境根据状态转移概率转移到下一个状态环境根据奖励函数 给出奖励信号,智能体利用奖励信号和状态转移更新策略,优化目标函数,最终确定最优路径。
52、对比现有技术的不足,本发明的有益效果为:
53、通过信息处理单元中的数据处理和缓存模块、数据融合模块,可以实现对各个采集模块的原始数据进行准确处理和整合,提高了系统对环境信息的感知能力。
54、数据优化和压缩模块能够对数据进行优化和压缩,减少了通信带宽的占用,提高了数据传输的效率,从而加快了信息传递的速度。
55、采用了滑动窗口平均滤波和卡尔曼滤波器的自适应调节,提高了数据处理的精确性和稳定性,从而增强了系统对环境的理解能力。
56、强化学习路径规划模块通过深度q网络(dqn)算法对环境进行建模和学习,可以实现对路径规划的精准和实时调整,从而提高了搭接车运行的安全性和效率。
57、数据自我处理模块中的算法模型能够实现对数据的实时处理和适应性调节,使得系统能够在不同场景下灵活应对,保持高效运行。
- 还没有人留言评论。精彩留言会获得点赞!