一种先进制造中人机协同工作的无碰撞协作控制方法
本发明属于安全关键控制,具体涉及一种先进制造中人机协同工作的无碰撞协作控制方法。
背景技术:
1、随着系统复杂性的增加,现代控制应用越来越重视安全性,并且在设计控制器时嵌入安全特性变得越来越重要。实时人机协作(hrc)是一个快速增长的应用领域,安全控制合成对于保证人机安全至关重要。为了确保hrc环境下的人员安全,国际标准化组织(iso)发布了iso 10218-2和iso/ts15066的安全规定,规定了在此类环境中工作的机器人的操作速度、功率和力量的限制。然而,在hrc中确保人员的安全是具有挑战性的,特别是在一些意外紧急情况下,例如意外发生的人员行为或人员意外超出工作空间边界。
2、为此,我们致力于开发一个基于安全关键控制的hrc控制器。安全关键型控制(scc)在工业hrc任务中得到广泛应用,该任务要求控制的准确性和操作人员的安全性得到保障,其能够将状态与系统误差绑定以实现适应性非线性约束控制。它具有保证稳定性和安全性的优点。势垒李雅普诺夫函数和控制势垒函数是安全关键型控制中著名的工具。在本文中应用这些工具来解决hrc任务中的路径跟踪和碰撞避免问题。
3、对于路径跟踪问题,势垒李雅普诺夫函数(blf)是scc中一个重要的工具,它是通过重新塑造控制李雅普诺夫函数(clf)的结构,融入势垒函数的特征而开发的。这样的函数在目标参数接近定义的限制时呈无穷大增长。blf及其扩展(例如sblf、log型blf、tan型blf和iblf)广泛应用于自主船舶、风力涡轮机、阻抗控制和工业制造领域。与现有方法相比,我们提出使用时变的iblf(tviblf)来执行hrc中的路径跟踪任务。这使我们能够直接约束系统输出而不是跟踪误差,这对于控制器设计可能更加方便。
4、对于避障问题,控制势垒函数是scc的一个子信道,它是wieland等人首次提出的,作为势垒函数的扩展。它的目标是同时保证输入信号的渐近稳定性,同时将其约束在安全设置中。在中提出了高阶cbf(hocbf)和指数cbf(ecbf)扩展来解决高阶相对度问题。在这项工作中,基于相对二阶ecbf和神经网络实现了位置状态修正,以实现通过二次惩罚规划方法解决的平滑和节省路径的避障。
5、lyapunov方法是证明非线性系统稳定性的强大工具。使用控制李亚普诺夫函数来合成机器人平台的稳定控制器已经变得越来越流行,通常通过二次规划(qp)。尽管这些控制器采用基于优化的公式,但它们通常无法实现长期最佳行为。出现这种缺陷的原因是这些优化问题的成本未能包含系统的未来行为,而是逐点最优。
6、为了拓展安全保证的范围超出集合的边界,已经出现了各种可以最好描述为“类lyapunov”的方法。也就是说,lyapunov函数产生不变的级别集,因此如果这些级别集包含在安全集中,就可以保证安全性。重要的是,这些条件可以应用于整个集合,而不仅仅是边界上。由于实际物理设备的限制、系统性能和安全要求,在实践中大多数系统的输出或状态应受到约束。因此,保持系统输出在所需的约束内被认为是重要的。对于非线性机械系统,输出约束可以被视为位置约束。近年来,势垒lyapunov函数(blf)已被提出用于解决复杂系统中的输出约束问题。对于严格反馈非线性系统,采用了一种不对称的时变blf,以确保时变输出约束。为具有未知参数的非线性随机系统开发了一种自适应控制方案。要求系统的所有状态都受到以对数形式的blf表示的约束,限定在有界紧致集合中。通过利用blf,处理了不确定的非严格反馈系统的输出约束问题。同时使用了一种tan-blf,在针对严格反馈非线性系统的系统化控制设计下,保持了输出在约束内。然后将tan-blf与一种新颖的容错领导者-跟随者形成控制方案相结合,以确保角度约束。与传统的log型和tan型blf相比,具有新颖的积分blf(iblf)的控制器可以直接约束状态信号,而不是误差信号。从工程的角度来看,机器人的初始状态可以放宽到整个受限空间。
7、关于系统动力学的知识与cbfs相结合,以生成状态空间的约束允许子集,使其受到控制而不变。通过使用cbfs的模型预测控制来实现这一目标。为了提高实时性能并包括性能规格,ames等人建议通过二次规划将cbfs与控制lyapunov函数(clfs)结合起来,用于巡航控制。该方法还成功应用于双足机器人步行以及摆动控制。然而,现有的控制策略需要一个联合控制设计,以执行任务并强制执行约束。由于有几种已经建立的控制方案可以实现机器人系统的目标导向行为,因此希望将这些方法与cbfs相结合。此外,涉及与人类互动的场景要求对多个和时变的约束进行执行,这对于cbfs而言迄今尚未正式讨论。在这项工作中,使用blfs考虑了关节、电机、路径跟踪等内部约束,而cbfs用于处理外部约束(障碍物等)。
技术实现思路
1、本发明针对上述现有技术中的技术问题,本发明的目的是提供一种先进制造中人机协同工作的无碰撞协作控制方法,通过创新的安全关键控制、不确定性估计和路径选择方法,提高机器人与人类协同任务的安全性和性能。
2、本发明为实现上述发明目的,采取的技术方案如下:一种先进制造中人机协同工作的无碰撞协作控制方法,包括以下步骤:
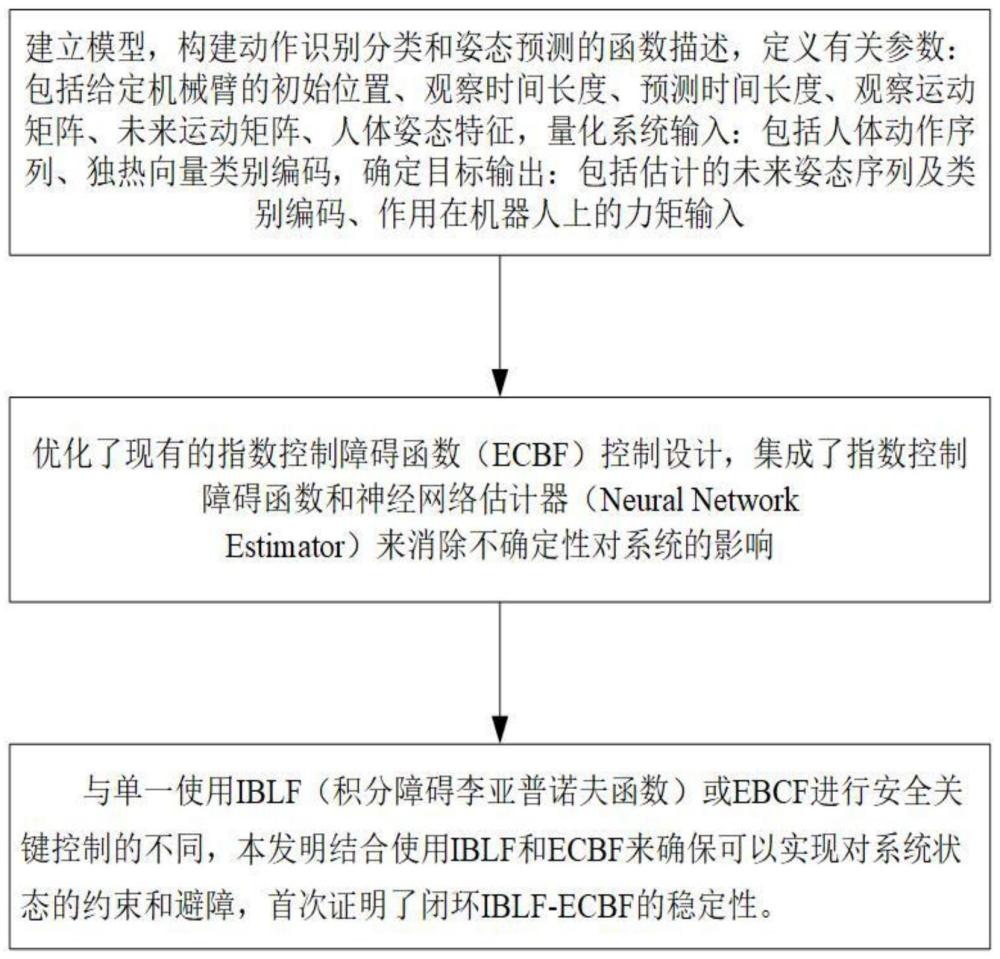
3、s1、构建动作识别分类和姿态预测的函数描述,定义有关参数:建立碰撞避免人机协作系统的设计和优化问题的优化模型;
4、s2、优化了现有的指数控制障碍函数ecbf控制设计,集成了ecbf和神经网络估计器neural network estimator来消除不确定性对系统的影响;
5、s3、使用积分障碍李雅普诺夫函数iblf和ecbf来确保可以实现对系统状态的约束和避障,建立了闭环iblf-ecbf的稳定性。
6、进一步的作为本发明的优选技术方案,所述s1中,建立模型,构建动作识别分类和姿态预测的函数描述,定义有关参数:包括给定机械臂的初始位置、观察时间长度、预测时间长度、观察运动矩阵、未来运动矩阵、人体姿态特征;量化系统输入:包括人体动作序列、独热向量类别编码;确定目标输出:包括估计的未来姿态序列及类别编码、作用在机器人上的力矩输入。
7、进一步的作为本发明的优选技术方案,所述s2中,使用rbfnn来逼近目标函数其中χ是包括机器人状态和笛卡尔控制力的输入向量;rbfnn的权重矩阵通过上述式子进行映射;是权重矩阵,s(χ)是隐藏节点输出的向量,每个隐藏节点sj(χ)是一个高斯基函数;oj和是基函数的中心和宽度参数;存在一个最优权重矩阵使得通过公式获得的系统估计值在所有输入χ的情况下,与真实值之间的误差最小;最优权重矩阵是为了分析目的而定义的人工量;最后,通过将dx替换为通过来获得系统的估计值。
8、进一步的作为本发明的优选技术方案,所述s3中,使用时间变化的不对称iblf控制方法来维持系统输出在时变的约束区域内;首先定义了误差z1,它表示末端执行器的实际位置与期望位置之间的差异;然后引入了跟踪误差z2,它表示末端执行器的笛卡尔速度与一个虚拟控制变量α之间的差异;通过设计虚拟控制变量,将控制系统的运动方程表示为为了避免式子中的第二项发生奇异性,引入了φi用来对其进行定义;最后,通过对方程进行推导,给出了的具体表达式,其中包括了误差项z、控制器参数、质量矩阵。
9、本发明所述的一种先进制造中人机协同工作的无碰撞协作控制方法,采用以上技术方案与现有技术相比,具有以下技术效果:
10、(1)本发明方法进一步估计系统的不确定性,提高机械臂的运动精度;
11、(2)本发明方法满足系统稳定性要求,证明了多安全关键控制技术及神经网络控制结合的可行性。
12、(3)本发明首次将系统不确定性加入iblf-ecbf系统中,进一步丰富了安全关键控制工具的组合。
- 还没有人留言评论。精彩留言会获得点赞!