一种无人机的电子围栏监控方法与流程
本发明涉及航线轨迹分配领域,更具体地说,它涉及一种无人机的电子围栏监控方法。
背景技术:
1、电子围栏是最先进的周界防盗报警系统,电子围栏以其独特的性能,被广泛应用于变电站、电厂、水厂、工厂、工业重地、工矿企业、物资仓库、住宅小区、别墅区、学校、机场、水产养殖及畜牧场所、政府机构、重点文物场所、军事设施、监狱、看守所等有围墙及需要围墙的场所;针对大型区域,目前还采用无人机配合电子围栏对区域进行全方位监控,实现对监控区域的长期、持续、高效的覆盖监控。
2、现有的监控方法是由无人机按规定航行路线均匀分布巡逻监控,这种方式的覆盖率会随着无人机的运动发生变化,从而无法保证无人机监控的覆盖率最大化,并且在电子围栏监控应用于实际场景时,还需要考虑到无人机能源消耗这一因素对无人机的智能协同编队控制方案的影响,进而导致现有的无人机的智能协同编队控制方案不合理,无人机的巡逻路径的方案不是最优选。
技术实现思路
1、本发明提供一种无人机的电子围栏监控方法,解决上述背景技术中提出的技术问题。
2、本发明提供了一种无人机的电子围栏监控方法,包括以下步骤:
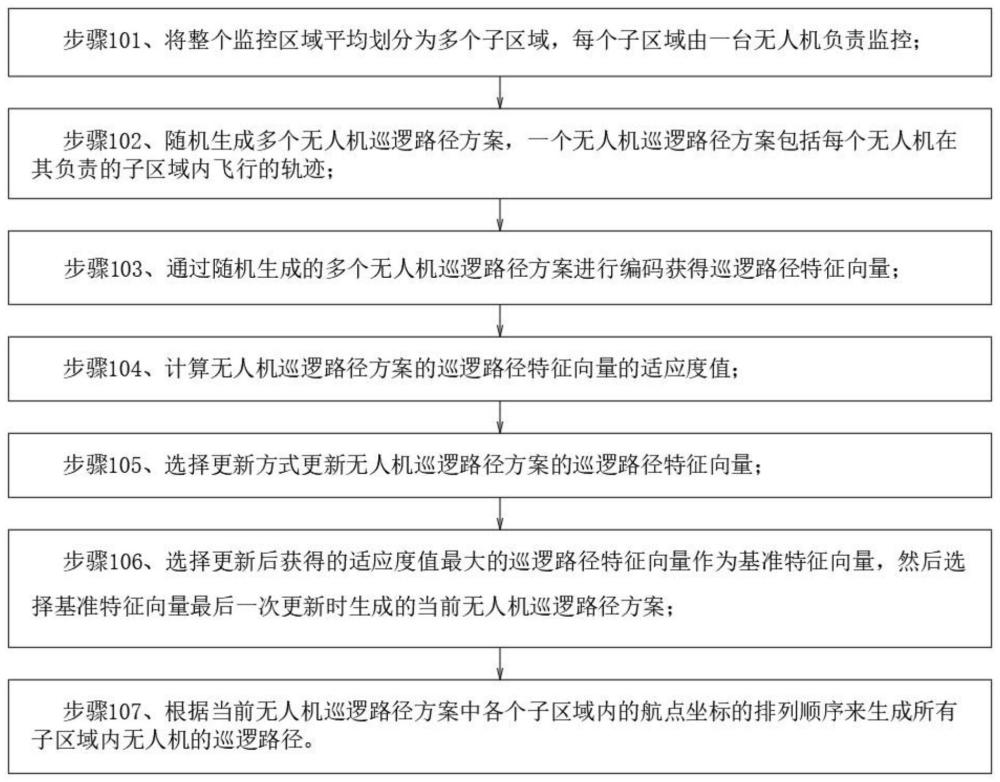
3、步骤101、将整个监控区域平均划分为多个子区域,每个子区域由一架无人机负责监控;
4、步骤102、随机生成多个无人机巡逻路径方案,一个无人机巡逻路径方案包括每个无人机在其负责的子区域内飞行的轨迹;
5、步骤103、通过随机生成的多个无人机巡逻路径方案进行编码获得巡逻路径特征向量;
6、步骤104、计算无人机巡逻路径方案的巡逻路径特征向量的适应度值;
7、步骤105、选择更新方式更新无人机巡逻路径方案的巡逻路径特征向量;
8、步骤106、选择更新后获得的适应度值最大的巡逻路径特征向量作为基准特征向量,然后选择基准特征向量最后一次更新时生成的当前无人机巡逻路径方案;
9、步骤107、根据当前无人机巡逻路径方案中各个子区域内的航点坐标的排列顺序来生成所有子区域内无人机的巡逻路径。
10、在一个优选的实施方式中,在步骤101中,将整个监控区域平均划分为n个子区域的方法包括以下步骤:
11、步骤一、采集监控区域的俯视平面图,以俯视平面图中的左下角为原点建立坐标系,获取监控区域边界的所有顶点;
12、步骤二、将所有顶点用一条闭合的凸多边形连接,获取凸多边形所有顶点中的xmax和xmin以及ymax和ymin;
13、步骤三、构造监控区域的最小外接矩形,以(xmin,ymin)作为最小外接矩形的左下角坐标,(xmax,ymax)作为最小外接矩形的右上角坐标,构建监控区域的最小外接矩形;
14、步骤四、将监控区域的最小外接矩形作为初始节点区域,初始化划分次数t为0;
15、步骤五、将节点区域等分为n个子区域(n为大于3的正整数),如果s子≥s阈,则将子区域作为下一轮的划分的节点区域,迭代次数累加一,否则输出第t次的子区域作为最终的监控区域划分的子区域。
16、在一个优选的实施方式中,在步骤101中,子区域的面积计算公式为:
17、
18、其中,s子表示第t次的子区域的投影面积,表示第t次划分的子区域的第i个顶点坐标,表示第t次划分的子区域的第i+1个顶点坐标,对于最后一个顶点,后续顶点坐标回到第一个顶点。
19、在一个优选的实施方式中,在步骤102中,生成的无人机巡逻路径方案的约束条件为:
20、相邻航点之间的距离不超过无人机的最大飞行距离限制;
21、两个无人机之间的距离不超过无人机的监控直径;
22、两个无人机之间的距离不低于无人机的扰动范围直径。
23、在一个优选的实施方式中,在步骤104中,适应度值的计算公式如下:
24、
25、其中表示第k个无人机巡逻路径方案的巡逻路径特征向量的适应度值,ω1和ω2分别表示无人机续航时间的权重系数和无人机对监控区域的监控覆盖率的权重系数,ω1和ω2根据系统对于无人机续航时间和无人机对监控区域的监控覆盖率要求来调整,ω1∈[0,1],ω1∈[0,1],tk表示第k个无人机巡逻路径方案中无人机巡逻路径总时长,ck表示第k个无人机巡逻路径方案中对监控区域的监控覆盖率,σ表示sigmoid函数,为s型函数。
26、在一个优选的实施方式中,在步骤104中,无人机巡逻路径方案中无人机巡逻路径总时长的计算公式为:
27、tk=lk/v
28、其中,lk表示第k个无人机巡逻路径方案中所有无人机巡逻路径的距离,v表示无人机的额定平均飞行速度;
29、所有无人机巡逻路径的距离的计算公式为:
30、
31、
32、其中,表示第k个无人机巡逻路径方案中第j个子区域内的无人机巡逻路径的距离,n表示子区域的数量,m表示j个子区域内的航点的数量,表示第k个无人机巡逻路径方案中第j个子区域内第i个航点的坐标,表示第k个无人机巡逻路径方案中第j个子区域内第i+1个航点的坐标;
33、无人机巡逻路径方案中对监控区域的监控覆盖率的计算公式为:
34、ck=gk/z
35、其中,gk表示所有无人机巡逻路径覆盖到的网格数量,z表示监控区域的总网格数量。
36、在一个优选的实施方式中,在步骤104中,计算无人机巡逻路径方案中对监控区域的监控覆盖率的方法包括:步骤一、先将监控区域离散成z个小网格,监控区域的范围是(xmin,ymin)到(xmax,ymax);
37、网格的行数计算公式为:
38、wh=ceil((ymax-ymin)/d)
39、其中,wh表示监控区域离散化后网络的行数,ymax表示监控区域顶点中的最大纵坐标,ymin表示监控区域顶点中的最小纵坐标,d表示网格的边长;
40、网格的列数计算公式为:
41、wl=ceil((xmax-xmin)/d)
42、其中,wl表示监控区域离散化后网络的列数,xmax表示监控区域顶点中的最大纵坐标,xmin表示监控区域顶点中的最小纵坐标,d表示网格的边长;
43、步骤二、遍历所有巡逻路径,判断它经过的每个航点所在的网格是否被覆盖;
44、对于每一条无人机巡逻路径:
45、提取路径中的所有航点坐标;
46、对于每个网格单元,检查该网格单元的矩形区域是否与该条路径的任何一段相交,如果相交,则将该网格单元标记为“已覆盖”;
47、步骤三、统计所有标记为“已覆盖”的网格单元数量g;
48、步骤四、计算无人机巡逻路径方案中对监控区域的监控覆盖率。
49、在一个优选的实施方式中,在步骤106中,第一更新条件为:
50、rsk<0.5,p<1;
51、第二更新条件为:
52、rsk<0.5,p≥1;
53、第三更新条件为:
54、rsk≥0.5;
55、其中,hf表示更新之前所有方案中的巡逻路径特征向量的集合,hk表示第k个方案中的巡逻路径特征向量,hpk表示更新之前的第k个方案中的巡逻路径特征向量的均值向量,t表示向量转置,sigmoid表示s型函数;
56、p=2a·r1-a
57、c=2r2
58、式中,r1与r2的值域为[0,1],r1与r2均是随机生成的,a为收敛因子;
59、a=2-2t/tmax
60、式中,tmax为最大迭代次数;
61、符合第一更新条件的更新方式如下:
62、xi(t+1)=x*(t)-p·(c·x*(t)-xi(t))
63、x*(t)表示为在完成t次更新且适应度值最大历史特征向量,xi(t)表示被更新的历史特征向量;
64、符合第二更新条件的更新方式如下:
65、xi(t+1)=xsuij(t)-p·(c·xsuij(t)-xi(t))
66、xi(t)表示被更新的历史特征向量,xsuij(t)表示完成t次更新的随机的一个历史特征向量;
67、符合第三更新条件的更新方式如下:
68、xi(t+1)=[c·x*(t)-xi(t)]·elcos(2πl)x*(t)
69、式中,l的值域为[-1,1],且l为随机数,e为自然常数。
70、一种无人机的电子围栏监控系统,包括以下模块:
71、区域划分模块,用于将整个监控区域平均划分为多个子区域;
72、路径方案生成模块,用于随机生成多个无人机巡逻路径方案;
73、方案编码生成模块,用于对随机生成多个无人机巡逻路径方案的进行方案编码生成巡逻路径特征向量;
74、适应度值计算模块,用于计算无人机巡逻路径方案的巡逻路径特征向量的适应度值;
75、更新模块,用于更新无人机巡逻路径方案的巡逻路径特征向量;
76、决策输出模块,基于更新后的无人机巡逻路径方案的巡逻路径特征向量生成所有子区域内无人机的巡逻路径方案。
77、一种计算机存储介质,其用于存储计算机可读指令,该计算机可读指令在由计算机系统执行时能够执行上述的一种无人机的电子围栏监控方法。
78、本发明的有益效果在于:本发明通过区域划分、多样化路径生成、编码优化和迭代更新等措施,能够高效地求解监控区域内无人机的最优巡逻路径,提高了监控的覆盖率和无人机编队的巡逻路径长度,具有积极的应用价值。
- 还没有人留言评论。精彩留言会获得点赞!