基于预设时间干扰观测器的气垫船航迹向双前馈控制方法
本发明涉及气垫船安全控制,尤其涉及一种基于预设时间干扰观测器的气垫船航迹向双前馈控制方法。
背景技术:
1、气垫船作为一种高性能船舶,可以作为非常高效的两栖运输船,实用性非常强。因此受到了众多科研学者们的青睐。然而由于气垫的存在,气垫船与水面的阻力相比于常规的船来说要小得多,这导致其抗风浪等环境干扰的能力较差,并且在进行回转等操作时,容易出现严重的侧滑运动,对气垫船的航行性能和安全有很大影响。因此,气垫船的运动控制研究受到广泛关注。
2、但由于气垫船数学模型具有强非线性,且模型中存在着参数不确定性和建模误差等不确定性因素,会对气垫船的运动控制带来不利影响,而干扰观测器是目前处理系统未知干扰和不确定性的一种有效方法,现有技术中的干扰观测器大多采用固定时间控制和有限时间控制,由于它们的稳定时间是随机和未知的,并且依赖于初始条件,导致在处理气垫船这类复杂动态系统时,容易因为控制效果不佳而存在安全隐患。
技术实现思路
1、本发明提供一种基于预设时间干扰观测器的气垫船航迹向双前馈控制方法,以克服采用固定时间控制和有限时间控制的干扰观测器的稳定时间是随机和未知的,并且依赖于初始条件,导致在处理气垫船这类复杂动态系统时,容易因为控制效果不佳而存在安全隐患的技术问题。
2、为了实现上述目的,本发明的技术方案是:
3、基于预设时间干扰观测器的气垫船航迹向双前馈控制方法,具体步骤包括:
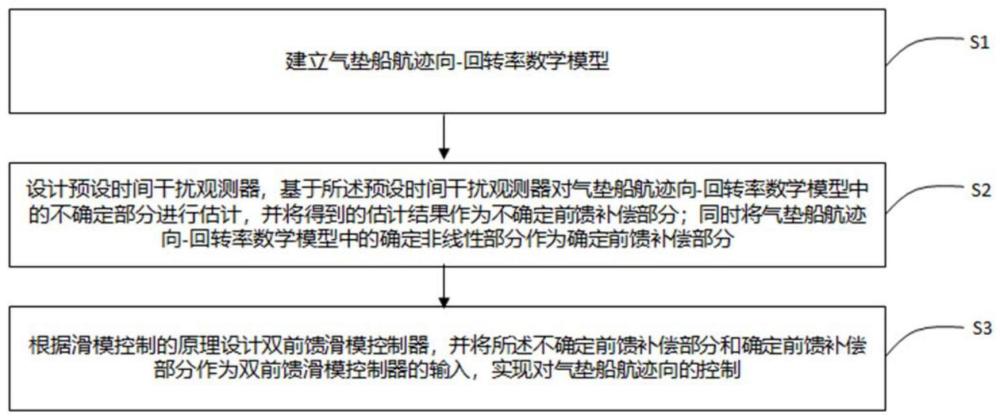
4、s1:建立气垫船航迹向-回转率数学模型;
5、s2:设计预设时间干扰观测器,基于所述预设时间干扰观测器对气垫船航迹向-回转率数学模型中的不确定部分进行估计,并将得到的估计结果作为不确定前馈补偿部分;同时将气垫船航迹向-回转率数学模型中的确定非线性部分作为确定前馈补偿部分;其中,气垫船航迹向-回转率数学模型中的不确定部分包括建模误差和模型参数不确定性;
6、s3:根据滑模控制的原理设计双前馈滑模控制器,并将所述不确定前馈补偿部分和确定前馈补偿部分作为双前馈滑模控制器的输入,实现对气垫船航迹向的控制。
7、进一步的,s2中,设计的预设时间干扰观测器表示为:
8、
9、其中,为艏向速度的估计值;为的一阶导数;为不确定部分的估计值;为的一阶导数;a1和a2为控制特征值的参数;p,q分别为气垫船的横摇速度和纵摇速度;r为气垫船的艏向速度;τr为未知的气垫船的舵力;jx0,jy0,jz0分别为气垫船的转动惯量;mzd0为气垫船航迹向-回转率数学模型中的已知误差;
10、其中,μ为单调递增函数,计算公式如下:
11、
12、式中,μ(t0)=1且t为单调递增函数运行时间;t为预设时间,且t>0;t0为初始时间;m为幂指数且m≥2。
13、进一步的,s1中,所述气垫船航迹向-回转率数学模型表示为:
14、
15、其中,p,q为气垫船的横摇速度和纵摇速度;r为气垫船的艏向速度;为r的一阶导数;θ分别为气垫船的横倾角和纵倾角;β为气垫船的侧滑角;为β的一阶导数;τr为未知的气垫船的舵力;σ为气垫船航迹向;为σ的一阶导数;m0表示气垫船的设计质量;jx0,jy0,jz0分别为气垫船的转动惯量;mzd0为气垫船航迹向-回转率数学模型中的已知误差;dr为包括建模误差和模型参数不确定性的不确定部分。
16、进一步的,s3中,根据滑模控制的原理设计双前馈滑模控制器,并将所述不确定前馈补偿部分和确定前馈补偿部分作为双前馈滑模控制器的输入,实现对气垫船航迹向的控制的过程为:
17、s31:基于气垫船航迹向-回转率数学模型设计航迹向跟踪误差;
18、s32:基于航迹向跟踪误差定义第一个滑模面sσ;
19、s33:基于第一个滑模面sσ设计虚拟控制律ασ;
20、s34:基于虚拟控制律ασ定义气垫船回转率与期望气垫船的回转率之间的误差;
21、s35:基于气垫船回转率与期望气垫船的回转率之间的误差定义第二个滑模面sr;
22、s36:基于第二个滑模面sr设计双前馈滑模控制器,并将所述不确定前馈补偿部分和确定前馈补偿部分作为双前馈滑模控制器的输入,实现对气垫船航迹向的控制。
23、进一步的,s31中,基于气垫船航迹向-回转率数学模型设计的航迹向跟踪误差为:
24、eσ=σ-σd (4)
25、
26、其中,eσ为航迹向跟踪误差;为eσ的一阶导数;σ为气垫船航迹向;σd为期望航迹向值;为σd的一阶导数;为气垫船的侧滑角β的一阶导数;θ分别为气垫船的横倾角和纵倾角;q为纵摇速度。
27、进一步的,s32中,定义的第一个滑模面sσ,表示为:
28、
29、其中,cσ是滑模参数,且满足cσ>0;eσ为航迹向跟踪误差;为eσ的一阶导数。
30、进一步的,s33中,设计的虚拟控制律ασ为;
31、
32、其中,ασf是对式(5)中确定的非线性项的前馈补偿,表示为:
33、
34、ασeq和ασs均为中间变量,表示为:
35、
36、式中,ησ是控制参数,且满足ησ>0;分别为气垫船的横倾角和纵倾角;q为纵摇速度;为期望航迹向值σd的一阶导数;为气垫船的侧滑角β的一阶导数;cσ是滑模参数,且满足cσ>0;sσ为第一个滑模面;eσ为航迹向跟踪误差。
37、进一步的,s34中,气垫船回转率与期望气垫船的回转率之间的误差er表示为:
38、er=r-ασ
39、对er=r-ασ两侧求导,并根据式(1)可得:
40、
41、式中,为er的一阶导数;p,q为气垫船的横摇速度和纵摇速度;r为气垫船的艏向速度;τr为未知的气垫船的舵力;jx0,jy0,jz0分别为气垫船的转动惯量;mzd0为气垫船航迹向-回转率数学模型中的已知误差;dr为包含建模误差和模型参数不确定性的总的不确定项;为虚拟控制律ασ的一阶导数。
42、进一步的,s35中,定义的第二个滑模面,表示为:
43、
44、式中,cr是滑模参数,且满足cr>0,a和b为正奇数,且满足0<a;b<1。
45、进一步的,s36中,设计的双前馈滑模控制器表示为:
46、τr'=jz0(τrf1+τrf2+τreq+τrs) (12)
47、其中,τrf1是对式(10)中确定的非线性部分的前馈补偿,τrf2是对dr的前馈补偿,表示为:
48、
49、τreq和均为中间变量,表示为:
50、
51、式中,ηr是控制参数;cr是滑模参数,且满足cr>0;a和b为正奇数,且满足0<a;b<1;er气垫船航迹向-回转率数学模型的误差;sr为第二个滑模面;
52、jx0,jy0,jz0分别为气垫船的转动惯量;mzd0为气垫船航迹向-回转率数学模型中的已知误差;为虚拟控制律ασ的一阶导数;dr为包括建模误差和模型参数不确定性的不确定部分。
53、有益效果:本发明通过设计预设时间干扰观测器估计气垫船航迹向-回转率数学模型中的不确定部分,通过预设时间观测器可以在预设时间内使误差达到稳定,在不考虑初始条件的情况下,允许用户根据实际需求灵活地设定收敛时间,可以使预设时间控制更加灵活、高效,并且适应性强,有助于提高双前馈滑模控制器的性能和鲁棒性。同时采用滑模控制的原理设计双前馈滑模控制器,具有快速响应、无需系统在线辨识、鲁棒性强以及物理实现简单等优点。
- 还没有人留言评论。精彩留言会获得点赞!