基于MIRLS-MAEKF的自适应循环发动机鲁棒变增益容错控制器
本发明涉及自适应循环发动机机载自适应模型建模,尤其涉及一种基于mirls-maekf的自适应循环发动机鲁棒变增益容错控制器。
背景技术:
1、自适应循环发动机(adaptive cycle engine,ace)作为一种创新性的航空燃气轮机技术,被认为是未来军事战斗机潜在的动力解决方案,同时也展示了在其他飞行器类型(例如超音速商用飞机)中的应用潜力。因此,ace具备非常广泛的应用前景。
2、在自适应循环发动机运行过程中,自然磨损、腐蚀、积垢及热蠕变等因素会导致气路部件性能退化。当前,广泛应用的机载模型包括部件级模型(component level model,clm)、线性变参数(linear parameter-varying,lpv)模型以及数据驱动模型。实际上,与clm相比,lpv和数据驱动模型更具实用性,因为它们需要较低的计算负荷。然而,训练数据驱动模型以覆盖飞行包络和发动机工作状态需要大量的数据,因此无法确保未覆盖飞行包络的模型精度。lpv模型使用有限工作点建立的线性模型,通过插值或拟合方法得到。自适应循环发动机部件性能退化以及维护和安装会导致同类型发动机之间的个体性能略有差异,因此离线lpv模型无法涵盖所有条件,建模误差不可避免,lpv模型的准确性通常低于clm。然而,估计精度高度依赖于滤波器递归过程中所使用的系统矩阵的更新频率;频率越高,估计精度越高。由于clm本身计算量大,模型需多次线性化,这将极大增加总计算量,使实时性难以满足。
3、由于自适应循环发动机工作环境恶劣且传感器数量众多,容易发生传感器故障。异常测量值会导致机载自适应模型的可靠性降低以及估计参数产生较大偏差。huber首次提出m估计器,通过更新测量噪声协方差矩阵,以克服异常测量值的影响。然而,该估计器无法处理针对网格拓扑结构的误差或异常值,这些拓扑结构会产生杠杆点。针对此问题,maronna和zhao设计了广义huber m估计器,即gm估计器。在此基础上,yacine提出了在扩展卡尔曼滤波器(extended kalman filter,ekf)的批量模式回归表示上实现鲁棒s估计器,s估计器具有高击穿点优势,即在面对大量异常值时仍然能够给出鲁棒的估计,且不会随系统维数增加而降低。然而,以上方法均基于迭代重加权最小二乘算法,虽对异常测量值有较好隔离作用,但是此类方法只适用于很有限的某一类具有特殊形式的系统矩阵模型的估计,在某些情况下存在估计结果发散的问题,不适用于燃气轮机发动机健康参数的估计。另外,目前传感器故障诊断方法通常采用卡尔曼滤波器组进行诊断,实现发动机单传感器和双传感器故障的诊断与信号重构,但该方法需进行大量滤波器组计算,严重影响机载自适应模型的实时性。
4、此外,当前广泛使用的滤波器各自存在问题,如线性化卡尔曼滤波器对非线性系统的估计误差较大,扩展卡尔曼滤波器需要具有完整过程和测量噪声协方差的随机系统进行最优估计,无迹卡尔曼滤波器由于未使用非线性模型的不同稳态点线性化先验信息,导致计算复杂度过高。
技术实现思路
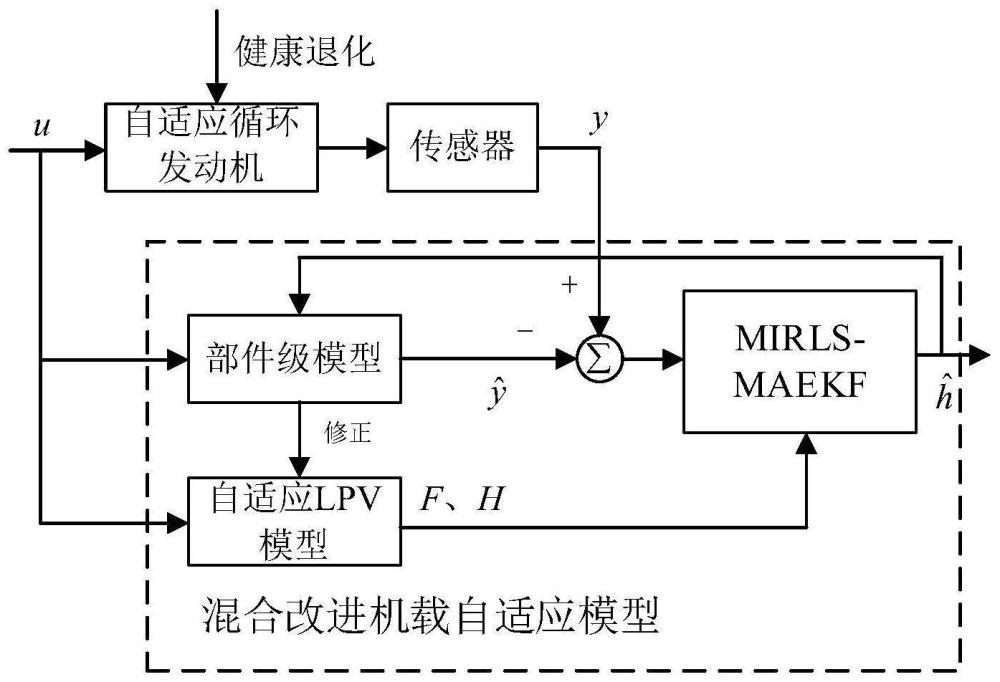
1、为解决现有技术存在的问题,本发明提出一种新的基于改进迭代重加权最小二乘-混合自适应扩展卡尔曼滤波器(modified iterative reweighted least squares–mixed adaptive extended kalman filter,mirls-maekf)的混合结构容错机载自适应模型。该模型利用部件级模型提高模型精度,同时采用自适应线性变参(adaptive linearparameter-varying,alpv)模型以提高实时性。同时,maekf基于扩展卡尔曼滤波器引入协方差缩放机制,并利用全协方差估计更新系统噪声协方差矩阵而得;mirls基于irls改进,依靠广义残差大小确定残差权重。将mirls与maekf相结合,设计mirls-maekf并应用于自适应循环发动机容错机载自适应模型的建立。这不仅提高了机载模型的估计精度和实时性,还能在多个传感器同时发生故障时实现快速故障检测并进行隔离,提升机载自适应模型的容错性和估计精度,同时估计出故障传感器所测参数的准确值。
2、本发明的技术方案为:
3、所述一种基于mirls-maekf的自适应循环发动机鲁棒变增益容错控制器,其特征在于:包括clm、所提出的mirls-maekf和用于在线参数预测的alpv模型,采用快慢双环设计。基本工作原理是将机载发动机模型的输出作为mirls-maekf的稳态参考值,该参考值通过扩展健康参数到模型进行实时估计,将健康参数反馈到clm和alpv模型进行在线更新,以确保其自适应能力。mirls-maekf的偏导数参数直接由alpv模型提供,以避免耗时的模型线性化过程,从而提高实时性能。这个过程以较高的更新速率进行,以实现精确的参数估计,clm的热力计算和alpv模型的校正计算同时进行。自适应clm采用小偏差线性化方法进行线性化,以校正alpv模型的参数,确保alpv模型在当前工作点的准确性,满足mirls-maekf递归过程中系统矩阵的精度要求。此过程以较低频率更新,以应对clm的重计算负担,为模型的慢速环。通过快慢双环设计,同时保证了模型的精度和实时性能,慢速环降低了模型线性化更新频率,保证了模型的精度,而快速环提高了机载自适应模型的实时性能。
4、所述mirls-maekf是一种新型扩展卡尔曼滤波器。自适应循环发动机具有强烈的非线性,即模型的系统方程和量测方程都是非线性的。ekf是对原系统和量测先进行泰勒级数展开,将系统近似为一阶线性系统再作线性卡尔曼滤波器估计,与线性kf的区别在于使用非线性模型计算状态值和输出值,可以解决非线性系统的参数估计问题。然而,ekf需要一个具有完整过程和测量噪声协方差的随机系统来进行最优估计,这在计算上可能耗时且估计精度较低。因此,本发明在ekf的基础上进行改进,提出了maekf算法。mirls基于irls改进,依靠广义残差大小确定残差权重。将mirls与maekf相结合,设计mirls-maekf并应用于自适应循环发动机容错机载自适应模型的建立。
5、针对下面形式的自适应循环发动机离散系统
6、
7、式中下标k表示该变量在第k步的值。
8、定义:
9、
10、
11、maekf的设计流程为:
12、初始化:
13、
14、
15、状态预测:
16、
17、
18、此处与ekf的区别在于将协方差矩阵乘以一个遗忘因子来补偿不完全动态方程的不利影响。通过这种方式对滤波过程中旧数据的权重进行缩放。
19、该滤波器中的遗忘因子
20、
21、其中,λ0为遗忘因子基准值。
22、nk和tk矩阵为
23、
24、
25、其中
26、
27、
28、通过平均前一个长度为n的残差序列,新残差的协方差估计可以推导为:
29、
30、其中,为卡尔曼滤波中的新息残差。得到估计的过程噪声矩阵如下:
31、
32、其中,在稳态下,上述方程可以采用下面的方程的方差协方差矩阵得到,具体如下:
33、
34、maekf的修正步长可由下式得到
35、
36、mirls-maekf中的mirls模块根据权重公式计算权重,异常值离群体越远,分配的权重越小,当异常值超过一定的限制值c时,其权重将变为0,这意味着完全隔离了故障传感器。混合自适应模块根据历史数据对测量噪声协方差矩阵和遗忘因子进行更新,从而不断优化滤波器参数。通过利用测量值与模型计算值的残差以及滤波器计算得到的参数进行迭代运算,实现状态量的估计。
37、如果修正步骤是鲁棒的,可以得到相应的鲁棒滤波器。加权最小二乘(wls)估计器是高斯噪声下的最大似然估计器,它可以被视作使回归残差范数最小的估计器,这意味着满足
38、
39、其中,为残差的标准差,即残差向量为arg min代表使后面式子达到最小值时的变量的取值。
40、标准差估计的大小受到异常测量值即离群点的影响,为了使相应的残差平方最小化,滤波器甚至倾向于向离群点倾斜。迭代重加权最小二乘(irls)可以克服此问题,irls方法对所有观测值进行迭代重加权运算,为正常观测值赋予权重1,为异常观测值赋予小于1的权重,异常观测值距离正常值越远,权重越小,直至为0。采用wls方法进行拟合时,由于异常观测值的权重仍为1,拟合结果与待估计圆会有较大偏差,而irls方法由于隔离了异常观测值,拟合效果远优于wls方法拟合结果。
41、若回归最小化残差的鲁棒尺度,则估计是鲁棒的,即
42、
43、其中,是一个鲁棒尺度估计器,最小化鲁棒尺度估计器可以确保对异常测量值的隔离,估计残差尺度的估计器定义如下
44、
45、式中,δ∈[0,1],函数ρ是满足ρ(0)=ρ'(0)=0且ρ”(0)>0的有界ρ函数,ρ是偶函数且ρ(r)对r不递减。为了确保干净数据下估计器的一致性,δ应固定为eφρ(r),其中φ为标准高斯分布,尺度估计器通过迭代求解
46、
47、其中,是相对标准残差,权函数
48、
49、选择的ρ函数为
50、
51、权函数定义为
52、
53、请注意,标准残差对应于一个具有无界ρ函数的估计器,即且δ=1。这种情况下鲁棒性的缺乏可以理解为对所有残差使用一个相等的权重进行加权,最小化残差的鲁棒尺度可以得到高度鲁棒估计器。
54、传统irls方法隔离异常观测点的策略是将超过阈值的残差对应的测量值权重设为0,该方法并非普遍适用,仅在具有特殊形式的量测矩阵hk的少数情况下有效。因为对于许多hk,由于hk对测量参数的不同权重影响,导致异常观测点对应的残差可能小于非异常观测点对应的残差,导致irls方法不再适用。本发明在irls的基础上改进了权重函数的计算,提出了mirls方法。
55、首先,利用最小二乘法计算测量参数
56、
57、然后计算残差
58、
59、当所有传感器无故障即无异常测量点时,残差r的值非常小,是一个接近于0的正整数;当部分传感器出现异常测量点时,残差r的值会比较大。
60、由于是一个n*n维的病态矩阵,可以将其相似行消除,即如果则令的第i行元素为0,其中表示矩阵的第i行元素,病态矩阵容限误差τill为大于0的很小的常数。
61、利用上述方法将对式
62、
63、进行求解的问题,化为非齐次线性方程组的求解问题。利用行列式的初等行变换可以解得
64、
65、其中,为通解,广义残差rg为特解,k∈r,通解项代表满足残差为0的测量参数的系列组合,特解项代表导致残差不为0的测量参数的系列组合,特解项元素的值越大,代表对应传感器测量参数越异常。
66、新的权重函数定义为
67、
68、mirls-maekf的量测预测方程为
69、
70、
71、
72、其中,wk为权重矩阵,
73、有益效果
74、与现有技术相比较,本发明的基于mirls-maekf的自适应循环发动机鲁棒变增益容错控制器结合部件级模型高精度的优势与自适应lpv模型高实时性的优势建立混合结构模型作为机载模型,并在传统扩展卡尔曼滤波器的基础上,将协方差矩阵乘以一个遗忘因子来补偿不完全动态方程的不利影响,通过这种方式对滤波过程中旧数据的权重进行缩放,设计了一种新型的mirls-maekf。mirls基于irls改进,依靠广义残差大小确定残差权重。将mirls与maekf相结合,设计mirls-maekf并应用于自适应循环发动机容错机载自适应模型的建立。这不仅提高了机载模型的估计精度和实时性,还能在多个传感器同时发生故障时实现快速故障检测并进行隔离,提升机载自适应模型的容错性和估计精度,同时估计出故障传感器所测参数的准确值。
75、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!