基于视觉的翼面损伤几何特征估计与自适应重构控制方法
本发明属于飞行控制,具体涉及一种基于视觉的翼面损伤几何特征估计与自适应重构控制方法。
背景技术:
1、翼面损伤是一种典型的机翼故障,与其他故障不同的是翼面损伤具有不确定性、高破坏性和复杂非线性。在过去几十年中,由机翼损伤故障引发的飞机失控仍是导致飞机发生致命事故的主要原因之一。诸多事故表明,在飞机不丧失必要升力和飞控系统仍有效的前提下,若飞行员采取快速有效的措施,能够有效减少因翼面损伤故障导致的灾难性事故发生的可能性,从而减少人员和财产的损失。因此,如果能够开发一套综合故障诊断和容错控制的系统,在故障时精确地估计飞机的损伤类型并采取对应的容错控制措施将显著的提高飞机生存能力。
2、可靠、快速、准确的翼面损伤故障检测是任何飞行控制系统容错控制重构的关键。众所周知,结构损伤等故障极大地改变了气动特性,通常还会导致飞行性能和操作质量的突然恶化,从而损害飞行安全。飞机飞行中机翼损伤会产生严重的后果,如果能够及时检测并估计出损伤的位置和面积,对提高飞行安全和可靠性具有重要意义。对于飞行控制系统而言,故障诊断是主动容错控制的前提,利用故障诊断方法获取准确故障信息,才能保证控制指令和操纵面偏转指令的准确性,使飞行控制系统达到预期控制效果。现有研究中基于模型的故障诊断方法具有明确的物理意义,可以实现对故障的在线检测。由于翼面损伤故障的不确定性,实时精确建模存在很大的难度。而不依赖系统模型的智能故障诊断方法在飞机稳态/准稳态的假设下具有良好的检测效果,但对损伤故障进行故障特征提取具有较大的工作量,且战斗机具有高动态特性,导致这种方法的诊断效果下降。由于没有一种检测技术像视觉系统那样可靠和快速,尤其是在飞机机翼大幅损伤情况下,留给飞控系统维持飞机稳定和平衡的时间极少,传统的故障检测方法和重构控制方法将难以适用。
技术实现思路
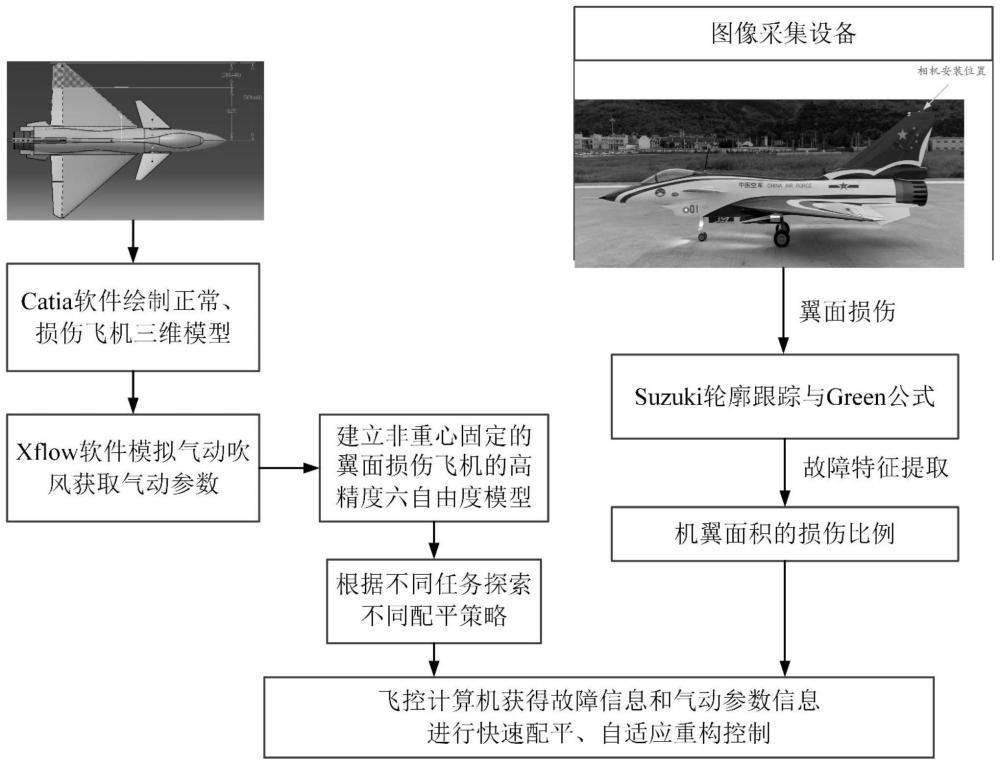
1、为了克服现有技术的不足,本发明提供了一种基于视觉的翼面损伤几何特征估计与自适应重构控制方法,包括:基于catia软件和xflow气动模拟软件,计算不同损伤飞机的气动参数,建立损伤飞机的六自由度非线性模型,完成不同损伤程度下飞机的高精度建模;根据不同飞行任务探究多种配平方案,实现不同损伤程度飞机的离线配平计算;利用视觉传感器、轮廓跟踪算法完成飞机翼面损伤情况的故障特征提取,实现翼面损伤飞机的几何特征参数估计;将基于视觉的几何特征估计参数与离线配平气动参数匹配,实现飞机的快速配平,并设计带有角加速度估计的自适应增量式动态逆重构算法,完成翼面损伤飞机高精度自适应重构控制。本发明所提供的方法可以实现损伤几何特征参数的在线精确估计和快速配平,实现飞机损伤故障发生后的快速稳定和精确控制,提升损伤飞机的生存概率和控制精度。
2、本发明解决其技术问题所采用的技术方案如下:
3、步骤1:建立损伤飞机的六自由度非线性模型,完成不同损伤程度下飞机的高精度建模;
4、步骤2:探究多种配平方案,实现不同损伤程度飞机的离线配平计算;
5、步骤3:利用视觉信息完成飞机翼面损伤情况的故障特征提取,实现翼面损伤飞机的几何特征估计;
6、步骤4:将基于视觉的几何特征估计参数与离线配平参数匹配,实现基于舵面配平的翼面损伤飞机高精度自适应重构控制。
7、进一步地,所述步骤1具体为:
8、步骤1-1:绘制不同程度损伤、正常飞机的模型,获取飞机的质量mair、机翼面积sair、平均气动弦长展长bair,并获取飞机的三维重心位置[△x△y△z]t,机体x,y,z轴的转动惯量ixx、iyy、izz,以及惯性积ixy、iyz和ixz,建立飞机的线加速度运动方程如下:
9、
10、式中[u,v,w]t分别为飞机空速vair在机体系三轴上的分量,[p,q,r]t分别为飞机的滚转角速度、俯仰角速度和偏航角速度,t为推力,d为阻力,l为升力,y为侧力,α为迎角,β为侧滑角,φ为滚转角,θ为俯仰角;
11、损伤飞机的角加速度运动方程如下:
12、
13、式中×表示向量叉乘,ω=[p,q,r]t,i为转动惯量且m为机体轴上的合外力矩,m分为正常飞机的气动力矩m0=[mx,0,my,0,mz,0]t和由于损伤产生的额外扰动力矩△m=[△mx,△my,△mz]t;
14、步骤1-2:采用泰勒级数展开将损伤飞机产生的气动力矩进一步展开成以下形式:
15、
16、式中qair为动压,ci0和cij,i=l,m,n,j=α,β,δ,ω分别表示正常飞机的滚转、俯仰和偏航力矩系数和对相应状态j=α,β,δ,ω的力矩导数,而符号‘△’表示因损伤导致对应力矩系数的增量和力矩导数增量,,δ=[δel δer δal δar δr]t,δel δer δalδar δr分别表示左右升降舵、左右副翼和方向舵;
17、步骤1-3:飞机的运动学方程如下:
18、
19、
20、
21、式中||·||表示向量的模,ψ为偏航角,[x,y,z]t表示飞机在地面系中的三维位置坐标;选择飞机的状态量为[v α β p q r φ θ ψ x y z]t,完成对飞机所有状态量运动方程的建立。
22、进一步地,所述步骤2具体为:
23、步骤2-1:飞机发生翼面损伤故障后,飞机受力的平衡方程如下:
24、
25、式中cx0、cy0、cz0表示零升阻力系数、侧力系数和升力系数,cxα、cyα、czα分别为阻力、侧力、升力关于迎角的导数,cxβ、cyβ、czβ分别为阻力、侧力、升力关于侧滑的导数,cxδδ、cyδδ、czδδ分别为阻力、侧力、升力关于不同控制舵面偏角δ的导数,△cx、△cy、△cz表示损伤产生的额外阻力、侧力、升力,符号‘△’表示因损伤导致对应气动力系数的增量,t=t0+△t,φ=φ0+△φ,β=β0+△β,θ=α=α0+△α以及δ=δ0+△δ表示损伤飞机新配平状态和控制面偏转角度,t0、φ0、β0、α0、δ0为正常飞机的配平状态和控制面偏转角度;
26、步骤2-2:由式(7)得受损飞机的气动力增量方程为:
27、qairsair(cxα△α+cxβ△β+cxδ△δ+△cx)-mairgcosα0△α-△mairgsinα0+△t=0 (8)
28、qairsair(cyα△α+cyβ△β+cyδ△δ+△cy)-mairg△φsinα0△α+△mairg△φcosα0=0(9)
29、qairsair(czα△α+czβ△β+czδ△δ+△cz)-mairgsinα0△α+△mairgcosα0=0 (10)
30、根据侧力平衡方程(9),受损飞机能够通过产生滚转角以及侧滑角或者操纵控制面配平的途径来实现损伤发生后飞机的侧力再平衡,进而通过调整迎角和推力使得损伤飞机纵向和法向力再次达到平衡;
31、步骤2-3:针对操纵控制面配平策略,控制面通过偏转一定的角度使得损伤飞机实现角速度改出以及姿态改出,进而使得损伤后的飞机重新恢复平衡,进行直线平飞;
32、步骤2-4:滚转角配平策略;
33、受损飞机产生滚转角使得损伤飞机侧力平衡,即△φ≠0和△β≈0;迎角增量△α根据公式(10)计算得出,具体如下:
34、
35、配平推力的增量△t和滚转角增量△φ分别由纵向力方程(8)和侧向力方程(9)确定,具体表达如下:
36、△t=(mairgcosα0-qscxα)△α-qairsair(△cx+cxδ△δ)+△mairgsinα0 (12)
37、
38、步骤2-5:侧滑角配平策略;
39、将滚转角增量△φ设置为零,进而根据式(9)和(10)计算配平所需要的迎角和侧滑角增量△α和△β,具体解如下:
40、
41、
42、其中,
43、
44、进一步地,所述步骤3具体为:
45、步骤3-1:图像增强;
46、对采集的图像使用直方图均衡化图像增强算法来提高图像的对比度,用于区分图像的前景和背景;
47、步骤3-2:图像处理;
48、输入的彩色图像先转化为八位单通道的灰度图像再进行后续处理,图像的灰度范围是0~255;然后再对图像进行二值化处理,采用自适应阈值分割法分割图像;再采用闭运算处理和开运算处理;
49、步骤3-3:轮廓检测;
50、使用基于suzuki轮廓跟踪算法检测图像中的飞机轮廓,进一步用douglas-peucker算法进行多边形近似,使轮廓更贴合飞机;
51、步骤3-4:面积计算;
52、检测出飞机的轮廓之后,使用green公式计算轮廓所包含区域的面积,通过对轮廓线上的点进行连线,将轮廓包含区域划分为多个三角形,然后计算出这些三角形的面积之和;
53、令飞机整体的面积为st,飞机翼面损伤后的面积为sf,飞机机体的面积为sb,用下式计算出损伤的机翼面积占单个机翼面积的比例k。
54、
55、即完成翼面损伤飞机的损伤估计;
56、进一步地,所述步骤4具体为:
57、步骤4-1:采用具有角加速度估计的增量式动态逆重构控制方法,以增强系统的鲁棒性和满足现代飞机大包线的飞行控制要求,重构控制器具体设计如下:
58、结合式(3),改写损伤飞机的角加速度运动方程(2)为如下的仿射非线性形式:
59、
60、式中,ω(t)和y1(t)分别表示系统的状态向量和输出向量;u(t)表示控制输入向量;f(ω(t))表示系统的非线性动态项,通常与控制输入无关;g(ω(t))表示系统的控制输入矩阵,与舵面数量相关。δd(t)表示系统受到的有界外部扰动向量;
61、步骤4-2:系统存在不确定性和扰动情况下,角加速度方程变为:
62、
63、其中,和表示完全已知的系统动态和控制输入矩阵,△f(ω(t))和△g(ω(t))则表示相对应的模型不确定量,δf(ω(t))和δd(t)独立于控制输入,因此,将式(19)简化为:
64、
65、使用投影算子的自适应律对扰动δd(ω(t))和模型不确定性δg(ω(t))进行估计,其形式如下:
66、
67、其中,e(t)=ωref(t)-ω(t),ωref(t)为参考输入指令,λ1,λ2表示估计增益,与误差收敛速度成正比,proj为投影算子;此时的角加速度估计信号形式如下:
68、
69、基于角加速度估计的增量式动态逆控制律设计如下:
70、
71、式中u0(t)表示上一时刻解算的控制输入指令,νω表示期望的角速度动态,表示角速度指令ωref的导数,用于提升角速度跟踪性能,kω=12·e3,e3表示三阶单位阵。
72、进一步地,所述估计增益λ1=150,λ2=80。
73、本发明的有益效果如下:
74、本发明方法可以实现对翼面损伤故障的快速检测和诊断,为重构控制提供快速、准确的故障诊断信息;采用离线配平策略和在线损伤检测可以实现翼面大幅度损伤情况下飞机的快速配平,进一步提高飞机在战场中的生存概率;采用角加速度估计的增量式动态逆重构控制方法可以实现对损伤飞机的高精度稳定控制,提升飞机的控制性能。
- 还没有人留言评论。精彩留言会获得点赞!