多电源电路的控制方法、多电源电路及存储介质与流程
本发明涉及医疗,具体涉及一种多电源电路的控制方法、多电源电路、手术机器人及存储介质。
背景技术:
1、随着手术机器人的发展,越来越多的人工手术被取代,手术机器人具有智能、稳定等优点,现在的手术机器人一般由人工一一开启多个控制台。
2、然而,随着手术复杂程度的提升,以及手术机器人功能的丰富,在临床应用中,可能需要启动大量的操作台以及执行机构,逐个触发开关容易导致准备时间增加,不利于手术进行。
技术实现思路
1、本发明解决的问题是现有的手术机器人的开启方法容易导致手术室准备时间过长。
2、为解决上述问题,本发明提供一种多电源电路的控制方法,应用于手术机器人,所述多电源电路包括至少一个患者手术平台、至少一个影像处理平台和至少一个医生控制台,所述控制方法包括:
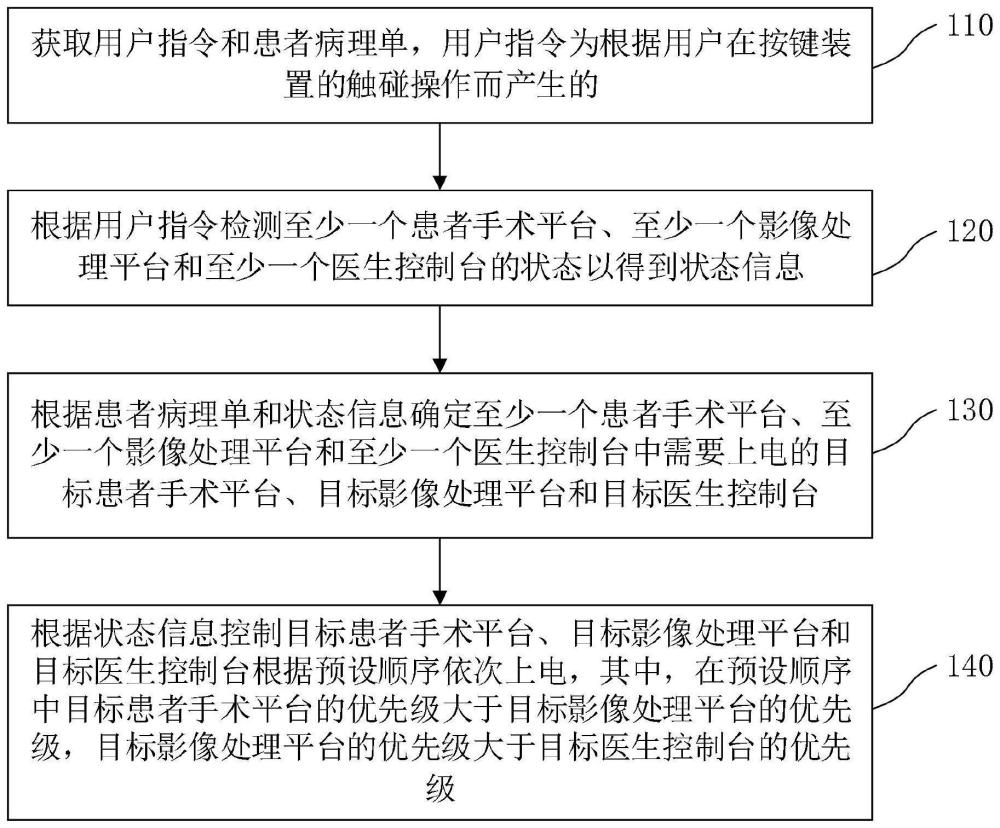
3、获取用户指令和患者病理单,所述用户指令为根据用户在按键装置的触碰操作而产生的;
4、根据所述用户指令检测所述至少一个患者手术平台、所述至少一个影像处理平台和所述至少一个医生控制台的状态以得到状态信息;
5、根据所述患者病理单和所述状态信息确定所述至少一个患者手术平台、所述至少一个影像处理平台和所述至少一个医生控制台中需要上电的目标患者手术平台、目标影像处理平台和目标医生控制台;
6、根据所述状态信息控制所述目标患者手术平台、所述目标影像处理平台和所述目标医生控制台根据预设顺序依次上电,其中,在所述预设顺序中所述目标患者手术平台的优先级大于所述目标影像处理平台的优先级,所述目标影像处理平台的优先级大于所述目标医生控制台的优先级。
7、可选的,所述根据所述状态信息控制所述目标患者手术平台、所述目标影像处理平台和所述目标医生控制台根据预设顺序依次上电包括:
8、根据所述状态信息确定所述目标患者手术平台、所述目标影像处理平台和所述目标医生控制台是否处于待上电状态;
9、若均处于待上电状态,则控制所述目标患者手术平台、所述目标影像处理平台和所述目标医生控制台根据所述预设顺序依次上电;
10、若所述目标患者手术平台、所述目标影像处理平台和所述目标医生控制台中至少一种未处于待上电状态,则控制处于待上电状态的平台按照所述预设顺序上电,并在预设时间内控制未处于待上电状态的所述目标患者手术平台、所述目标影像处理平台和所述目标医生控制台进行自恢复。
11、可选的,在所述在预设时间内控制未处于待上电状态的所述目标患者手术平台、所述目标影像处理平台和所述目标医生控制台进行自恢复之后,所述控制方法还包括:
12、再次检测未处于待上电状态的所述目标患者手术平台、所述目标影像处理平台和所述目标医生控制台进行自恢复之后的状态;
13、若所述目标患者手术平台、所述目标影像处理平台和/或所述目标医生控制台处于待上电状态,则按照所述预设顺序控制上电;
14、若所述目标患者手术平台仍未处于待上电状态,则发出警报;
15、若所述目标影像处理平台和/或所述目标医生控制台仍未处于待上电状态,则根据所述患者病理单和所述状态信息查找所述目标影像处理平台的备用影像处理平台和/或所述目标医生控制台的备用目标医生控制台。
16、可选的,所述根据所述状态信息控制所述目标患者手术平台、所述目标影像处理平台和所述目标医生控制台根据预设顺序依次上电还包括:
17、根据所述患者病理单确定所述目标影像处理平台和所述目标医生控制台的个数和开启阶段;
18、若所述目标影像处理平台和所述目标医生控制台均为一个,则控制所述目标患者手术平台、所述目标影像处理平台和所述目标医生控制台依次上电;
19、若所述目标影像处理平台或所述目标医生控制台为多个,则根据所述个数和所述开启阶段确定所述目标患者手术平台、所述目标影像处理平台和所述目标医生控制台的上电顺序。
20、可选的,所述根据所述个数和所述开启阶段确定所述目标患者手术平台、所述目标影像处理平台和所述目标医生控制台的上电顺序包括:
21、根据所述用户指令控制所述目标患者手术平台开启;
22、若所述目标影像处理平台的个数为多个,所述目标医生控制台的个数为多个,且均在同一阶段开启,则控制多个所述目标影像处理平台开启后,再控制多个所述目标医生控制台开启;
23、若在第一阶段所述目标影像处理平台的个数为m1,所述目标医生控制台的个数为n1,在第二阶段所述目标影像处理平台的个数为m2,所述目标医生控制台的个数为n2,则控制m1个所述目标影像处理平台开启后,再控制n2个所述目标医生控制台开启,且在预设时间后再控制m2个所述目标影像处理平台开启,后控制n2个所述目标医生控制台开启。
24、可选的,所述根据所述患者病理单确定所述目标影像处理平台和所述目标医生控制台的个数和开启阶段包括:
25、根据所述患者病理单确定病灶位置和病灶部位的面积;
26、若所述病灶部位的面积小于预设面积,则增加所述目标医生控制台的个数;
27、若所述病灶位置大于1,则增加所述目标影像处理平台的个数,且增加开启阶段的次数。
28、可选的,所述控制方法还包括:
29、获取关机指令,所述关机指令为根据用户在按键装置的触碰操作而产生的;
30、根据所述用户指令控制所述目标患者手术平台关机;
31、检测所述目标患者手术平台关机后,将所述用户指令发送至所述目标影像处理平台的控制器以控制所述目标影像处理平台关机;
32、检测所述目标影像处理平台关机后,将所述用户指令发送至所述目标医生控制台的控制器以控制所述目标医生控制台关机。
33、本技术实施例还提供一种多电源电路,应用于手术机器人,所述多电源电路包括:
34、至少一个患者手术平台;
35、至少一个影像处理平台;
36、至少一个医生控制台;
37、处理器,处理器均与所述至少一个患者手术平台、所述至少一个影像处理平台和所述至少一个医生控制台连接,所述处理器用于执行上述任一项所述的控制方法。
38、本技术实施例还提供一种手术机器人,所述手术机器人包括:
39、按键装置,用于获取用户对所述按键装置上的按键的触碰操作,并响应于所述触碰操作生成用户指令;
40、如上述所述的多电源电路,所述多电源电路与所述按键装置连接。
41、本技术实施例还提供一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如上述任一项所述的控制方法的步骤。
42、本技术实施例所提供的多电源电路的控制方法,应用于手术机器人,通过获取用户指令后检测至少一个患者手术平台、至少一个影像处理平台和至少一个医生控制台的状态以得到状态信息,并根据患者病理单和状态信息确定需要上电的目标患者手术平台、目标影像处理平台和目标医生控制台,可以根据不同患者病理单自动识别待上电的平台,减少了人工判断,提高了对不同场景的识别性和适应性,提高了多电源电路的智能性。另外本技术实施例根据状态信息控制目标患者手术平台、目标影像处理平台和目标医生控制台根据预设顺序进行上电,进而实现了一键启动手术机器人的效果,减少了操作者数量,可以个人单独完成手术室设备的准备工作,进而有效缩短了手术室准备时间。
- 还没有人留言评论。精彩留言会获得点赞!