一种基于实时事故回报值的无人矿卡路径规划方法
本发明涉及无人矿卡的路径规划,尤其涉及一种基于实时事故回报值的无人矿卡路径规划方法。
背景技术:
1、在露天矿区内进行无人矿卡的全局路径规划时,虽然可以得到一条能耗最低的最优化路径,但在实际运输时,由于露天矿区内环境的不确定性,当无人矿卡按照预定的最优化路径行驶时,很容易碰到一些不可预测的状况,如:山体滑坡或道路坍塌等,以至于无人矿卡无法按照预定的最优化路径行进。由于传统的离线路径规划算法不具备处理这种突发状况的能力,所以当发生突发状况时,无人矿卡会因无法做出及时的应对措施而停止前进,导致后续的无人矿卡也无法按照预定的最优化路径进行运输,从而导致整个露天矿运输网络的堵塞和崩溃。因此,无人矿卡不仅需要拥有离线的全局路径规划能力,还需要具备应对突发情况的应急局部路径规划能力。但目前对于路径规划的研究主要都集中与全局路径规划搜索,少有方法能够很好的解决局部路径规划能力。
技术实现思路
1、针对上述现有技术的不足,本发明提出了一种基于实时事故回报值的无人矿卡路径规划方法,能够对无人驾驶矿卡进行局部规划,使无人驾驶矿卡在发生突发情况时有应急处理的能力,防止整个露天矿运输网络堵塞和崩溃。
2、本发明提出的一种基于实时事故回报值的无人矿卡路径规划方法,该方法包括如下步骤:
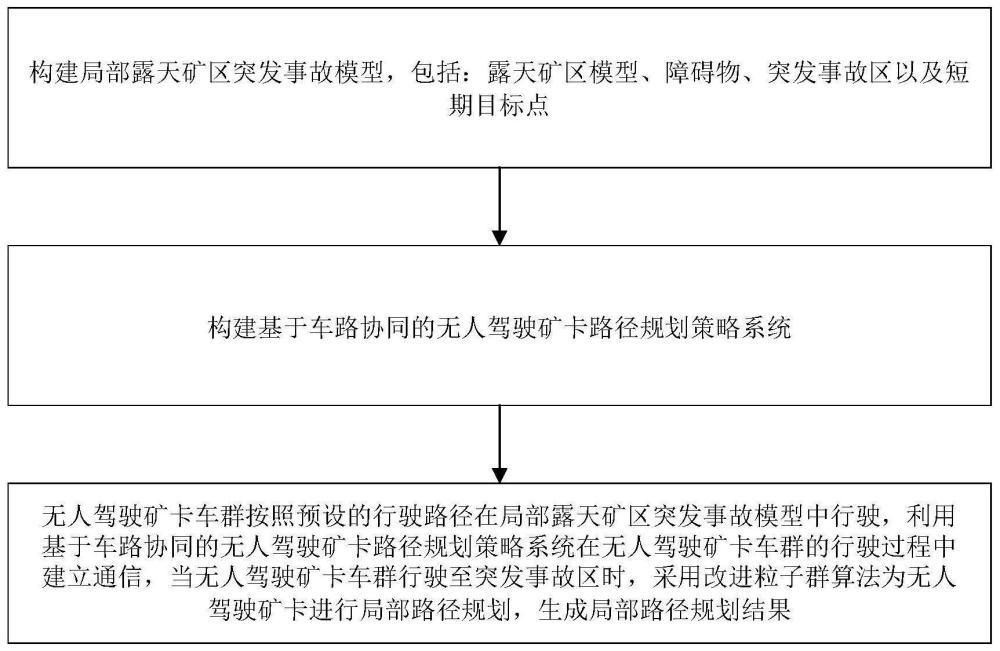
3、步骤1:构建局部露天矿区突发事故模型,包括:露天矿区模型、障碍物、突发事故区以及短期目标点;
4、步骤2:构建基于车路协同的无人驾驶矿卡路径规划策略系统;
5、步骤3:无人驾驶矿卡车群按照预设的行驶路径在局部露天矿区突发事故模型中行驶,利用基于车路协同的无人驾驶矿卡路径规划策略系统在无人驾驶矿卡车群的行驶过程中建立通信,当无人驾驶矿卡车群行驶至突发事故区时,采用改进粒子群算法为无人驾驶矿卡进行局部路径规划,生成局部路径规划结果;
6、所述步骤1进一步包括:
7、步骤1.1:构建露天矿区模型;
8、步骤1.2:定义突发事故区,并在露天矿区模型中随机添加若干个突发事故区和障碍物,同时在露天矿区模型中随机设置若干个短期目标点,完成局部露天矿区突发事故模型的构建;
9、步骤1.1中所述构建露天矿区模型的方法为:根据无人驾驶矿卡的质量、速度以及作业状态构建露天矿区数学模型;获取露天矿区的地理信息并采用数据增强技术进行数据处理,根据处理后得到的信息对露天矿区进行地形建模和地质建模,将建模结果进行可视化,得到露天矿区模型;
10、步骤2中所述基于车路协同的无人驾驶矿卡路径规划策略系统,包括:云控平台、智能路侧系统、智能车载系统和通信协议;
11、所述云控平台,用于接收来自智能路侧系统和智能车载系统的数据,根据接收到的数据进行局部路径规划处理并向智能车载系统下发运行指令;
12、所述智能路侧系统,用于在无人驾驶矿卡的运行过程中采集环境信息并利用通信协议传输给智能车载系统;
13、所述智能车载系统,用于根据智能路侧系统传递的环境信息控制无人驾驶矿卡的自动驾驶,并将无人驾驶矿卡的行驶情况实时反馈至智能路侧系统;
14、所述通信协议,用于实现智能路侧系统与智能车载系统之间的数据交换;
15、所述通信协议在进行数据交换时的帧结构依次包括:帧起始、仲裁段、控制段、数据段、crc段、ack段和帧结束;
16、所述智能路侧系统,包括:路侧信息采集子系统、路侧控制单元和路侧无线通信设备;
17、所述路侧信息采集子系统,用于判断道路路面质量、检测交通异常事故以及采集交通流信息,并将得到的数据传输给路侧控制单元;
18、所述路侧控制单元,用于根据接收的数据监控无人驾驶矿卡的行驶情况并采集道路数据,将得到的行驶情况和道路数据传递给路侧无线通信设备;
19、所述路侧无线通信设备,用于以通信协议为基础与智能车载系统进行数据交换,同时将数据传输至云控平台;
20、所述智能车载系统,包括:车载信息采集子系统、车载控制单元和车载无线通信设备;
21、所述车载信息采集子系统,用于感知无人驾驶矿卡的周围环境、判断车辆运动状态和车辆自身属性,并将得到的数据传输至车载控制单元;
22、所述车载控制单元,用于在不同的场景与环境下,通过主动控制来保持无人驾驶矿卡的自适应性和鲁棒性;所述主动控制,包括:纵向控制和横向控制两种控制方式;所述纵向控制是指通过控制无人驾驶矿卡的油门和制动,实现对期望车速的精准控制,即对无人驾驶矿卡的驱动和制动进行控制;所述横向控制是指对矿卡方向盘以及轮胎的控制,实现对无人驾驶矿卡的行驶路径进行控制;
23、所述车载无线通信设备,用于以通信协议为基础与智能路侧系统进行数据交换,同时将数据传输至云控平台;
24、所述步骤3进一步包括:
25、步骤3.1:将无人驾驶矿卡车群作为粒子群,将无人驾驶矿卡车群中的每一辆无人驾驶矿卡作为一个粒子,将无人驾驶矿卡的行驶路径为粒子的运动轨迹,设置变量k来记录粒子群循环至目标函数收敛时的迭代次数;
26、步骤3.2:无人驾驶矿卡车群在局部露天矿区突发事故模型中按照预定的行驶路径行驶,当任意无人驾驶矿卡行驶至突发事故区时,通过基于车路协同的无人驾驶矿卡路径规划策略系统侦测事故信息并传输至云控平台;
27、步骤3.3:云控平台将事故信息传输至局部露天矿区突发事故模型中的无人驾驶矿卡车群,无人驾驶矿卡车群根据接收到的事故信息产生事故回报值f_reward并传输至云控平台;
28、步骤3.4:云控平台在接收f_reward后,通过基于车路协同的无人驾驶矿卡路径规划策略系统向无人驾驶矿卡群更新事故信息,确定受突发事故区影响的无人驾驶矿卡,并该无人驾驶矿卡进行初始化,设置无人驾驶矿卡车群的数量、无人驾驶矿卡的满载数量、非线性学习因子c1和c2、边界因子b1和b2、控制因子σ、非线性惯性权重因子w′、超参数γ、无人驾驶矿卡平均速度、突发事故区半径r、受突发事故区影响的无人驾驶矿卡的半径r1、η和距离代价函数cost_f的权重系数α和β;
29、步骤3.5:定义距离代价优化函数cost_f作为适应度函数;
30、步骤3.6:利用距离代价优化函数cost_f计算粒子群中每个粒子的适应度,根据适应度更新粒子的个体最优值与粒子群的群体最优值;
31、步骤3.7:判断适应度函数是否收敛,若收敛,则将得到的无人驾驶矿卡行驶路径作为局部路径规划结果;若不收敛,则将粒子的当前位置和速度通过基于车路协同的无人驾驶矿卡路径规划策略系统进行更新,重复步骤3.2-3.6直至收敛为止;
32、步骤3.3中所述无人驾驶矿卡车群根据接收到的事故信息产生事故回报值f_reward的过程为:将无人驾驶矿卡在行驶过程需要躲避的每一个突发事故区作为一个事故故障任务,对于无人矿卡车群中的任意无人驾驶矿卡构建事故故障任务序列t,记为t={t1,…,ti,…,tn},其中t1为第一个事故故障任务,ti为第i个事故故障任务,tn为第n个事故故障任务;对于事故故障任务ti,设ti对应的突发事故区半径为r,表示为:
33、
34、其中x、y、z表示无人驾驶矿卡在局部露天矿区突发事故模型中的位置坐标;xi、yi、zi表示突发事故区几何中心的位置坐标;
35、当无人驾驶矿卡处理事故故障任务时,将无人驾驶矿卡的位置与突发事故区几何中心的直线距离设为range,表示为:
36、
37、将受突发事故区影响的无人驾驶矿卡的半径表示为r1,当range=r+r1时,说明此时无人驾驶矿卡刚好避开突发事故区,则此时无人驾驶矿卡刚好完成事故应急处理的局部路径规划任务;当range>r+r1时,说明此时无人驾驶矿卡已经远离突发事故区,无人驾驶矿卡不受影响,按照当前行驶路径继续行驶;当r1≤range≤r时,说明此时无人驾驶矿卡正处于突发事故区的影响范围内,无人驾驶矿卡等待执行事故应急处理的局部路径规划任务;根据无人驾驶矿卡的位置与突发事故区几何中心的直线距离range产生事故回报值f_reward并传输至云控平台;
38、所述事故回报值f_reward为:
39、
40、其中η为一个大于0的数,用于区分无人驾驶矿卡所处的位置与突发事故区的相对位置;
41、步骤3.4中所述非线性权重因子w′为:
42、
43、其中θ为无人驾驶矿卡所处位置的坡度角;γ为超参数,且γ取值为实数,用于控制改进群算法选择进行全局搜索或局部搜索;wmax是最大惯性权重;wmin是最小惯性权重;k表示当前迭代次数;
44、所述非线性学习因子c1和c2表示为:
45、
46、
47、步骤3.5中所述距离代价优化函数cost_f为:
48、cost_f=α×c_path-β×f_reward×δpath
49、δpath=|n_path-f_path|
50、其中α和β均为权重系数;对于受突发事故区影响的无人驾驶矿卡,c_path表示无人驾驶矿卡从起点到短期目标点以及为规避事故突发区的躲避障碍物所行驶的所有路径之和;δpath为无人驾驶矿卡的相对行驶路程差;f_path表示无人驾驶矿卡为躲避突发事故区所行驶的实际路径长度;n_path表示行驶至突发事故区之前无人驾驶矿卡的预定行驶路径长度;
51、步骤3.6中所述根据适应度计算粒子的个体最优值与粒子群的群体最优值的方法为:设置粒子群中各粒子的随机位置和速度,将无人驾驶矿卡行驶到当前位置时消耗能量最少的路径作为个体最优值pbest,将无人驾驶矿卡车群在行驶过程中消耗能量最少的路径作为群体最优值gbest;对于任意粒子,利用距离代价优化函数cost_f计算该粒子的适应度,将得到的适应度值与个体最优值pbest进行比较,若该适应度值优于个体最优值pbest,则将适应度值作为新的个体最优值pbest;反之,则个体最优值pbest不变;在完成个体最优值的更新后,再将个体最优值pbest与群体最优值gbest进行对比,若个体最优值pbest优于群体最优值gbest,则将群体最优值gbest作为该粒子的个体最优值pbest;反之,则不改变群体最优值。
52、采用上述技术方案所产生的有益效果在于:
53、本发明方法通过引入一个事故回报值f_reward,对传统粒子群算法(particleswam optimization,pso)进行代价函数的再定义,弥补了传统pso算法无法实时的处理突发问题的缺陷。本发明方法通过增强基于实时事故回报值的改进粒子群算法(f_rewardparticle swam optimization,rew-pso)的稳定性,赋予事故回报值以权重系数,从而避免该算法陷入局部最小的误区,使得无人矿卡在按照预定的最优化路径行驶过程中遇到突发事故的情况时,具备应急局部路径规划的能力
- 还没有人留言评论。精彩留言会获得点赞!