飞行器参数在线辨识方法、装置、飞行器及计算机可读存储介质与流程
本技术涉及飞行器,尤其涉及一种飞行器参数在线辨识方法、装置、飞行器及计算机可读存储介质。
背景技术:
1、旋翼飞行器具有结构简单、机动性强、能够垂直起降等特点,近年来在军事和民用领域都取得了越来越广泛的应用:在军事领域,飞行器具有对敌侦察,具有打击、护航、目标搜索等许多重要功能;在民用领域,飞行器被用来执行包括灾害救援、航拍、短距离运输等任务。
2、在实际应用中,由于飞行器在设计、器件制造以及不同飞行工况的过程中,会存在各种各样的不确定性,造成不同工况下量产飞行器与设计飞行器之间存在一定的参数不确定性,导致单一的参数难以实现各种工况下的最优控制性能。目前,为实现飞行器设计在不同工况下的最优控制性能,可通过根据已知外界不同的飞行工况针对性地离线设置不同工况下的对应参数,或者,在不同的飞行工况下试飞进行参数调整,但是,上述方式均需要耗费大量的时间精力实际设计对应工况下的参数,导致不同工况下参数辨识过程的不够便捷,并且成本高。
3、因此,如何提高飞行器参数辨识的便捷性,是目前亟需解决的一个问题。
技术实现思路
1、本技术的主要目的在于提供一种飞行器参数在线辨识方法、装置、飞行器及计算机可读存储介质,旨在解决如何提高飞行器参数辨识的便捷性的技术问题。
2、为实现上述目的,本技术提供一种飞行器参数在线辨识方法,包括:
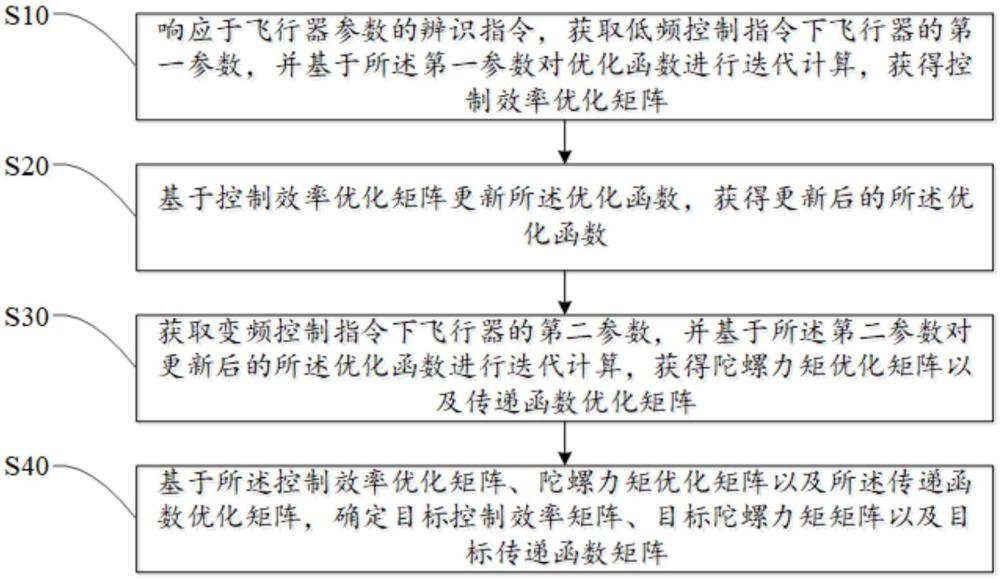
3、响应于飞行器参数的辨识指令,获取低频控制指令下飞行器的第一参数,并基于所述第一参数对优化函数进行迭代计算,获得控制效率优化矩阵,其中,所述优化函数由飞行器的控制效率矩阵、陀螺力矩矩阵及传递函数矩阵确定,所述第一参数包括飞行器的待辨识参数以及第一运行参数;
4、基于控制效率优化矩阵更新所述优化函数,获得更新后的所述优化函数;
5、获取变频控制指令下飞行器的第二参数,并基于所述第二参数对更新后的所述优化函数进行迭代计算,获得陀螺力矩优化矩阵以及传递函数优化矩阵;
6、基于所述控制效率优化矩阵、陀螺力矩优化矩阵以及所述传递函数优化矩阵,确定目标控制效率矩阵、目标陀螺力矩矩阵以及目标传递函数矩阵。
7、在一实施例中,所述响应于飞行器参数的辨识指令,实时获取低频控制指令下飞行器的第一参数,并基于所述第一参数对优化函数进行迭代计算,获得控制效率优化矩阵的步骤包括:
8、响应于飞行器参数的辨识指令,第一预设时长内基于所述低频控制指令控制所述飞行器;
9、实时获取所述飞行器当前的第一参数,并基于所述第一参数对所述优化函数进行迭代计算;
10、若所述低频控制指令的持续时长达到所述第一预设时长,则基于当前的优化函数确定所述控制效率优化矩阵。
11、在一实施例中,所述第一运行参数包括飞行器的三轴对应的第一角加速度、三轴对应的第一角速度、三轴对应的第一速度、三轴对应的第一转速变化率、机体坐标系下三轴的第一加速度以及各个旋翼的第一转速,所述飞行器的待辨识参数包括控制效率矩阵的参数、陀螺力矩矩阵的参数以及传递函数矩阵的参数。
12、在一实施例中,所述获取变频控制指令下飞行器的第二参数,并基于所述第二参数对更新后的所述优化函数进行迭代计算,获得陀螺力矩优化矩阵以及传递函数优化矩阵的步骤包括:
13、第二预设时长内基于所述变频控制指令控制所述飞行器;
14、实时获取所述飞行器当前的第二参数,并基于所述第二参数对更新后的所述优化函数进行迭代计算;
15、若所述变频控制指令的持续时长达到所述第二预设时长,则基于当前的优化函数确定所述陀螺力矩优化矩阵以及所述传递函数优化矩阵。
16、在一实施例中,所述第二参数包括飞行器的待辨识参数以及第二运行参数,所述第二运行参数包括飞行器的三轴对应的第二角加速度、三轴对应的第二角速度、三轴对应的第二速度、三轴对应的第二转速变化率、机体坐标系下三轴的第二加速度以及各个旋翼的第二转速。
17、在一实施例中,所述基于所述控制效率优化矩阵、陀螺力矩优化矩阵以及所述传递函数优化矩阵,确定目标控制效率矩阵、目标陀螺力矩矩阵以及目标传递函数矩阵的步骤包括:
18、基于所述控制效率优化矩阵、陀螺力矩优化矩阵以及所述传递函数优化矩阵,通过最小二乘滤波器进行处理,获得目标控制效率矩阵、目标陀螺力矩矩阵以及目标传递函数矩阵。
19、在一实施例中,所述基于所述控制效率优化矩阵、陀螺力矩优化矩阵以及所述传递函数优化矩阵,通过最小二乘滤波器进行处理,获得目标控制效率矩阵、目标陀螺力矩矩阵以及目标传递函数矩阵的步骤包括:
20、基于所述控制效率优化矩阵、陀螺力矩优化矩阵以及所述传递函数优化矩阵,确定待优化矩阵;
21、将所述待优化矩阵输入所述最小二乘滤波器进行处理,获得优化矩阵;
22、基于所述优化矩阵,确定所述目标控制效率矩阵、目标陀螺力矩矩阵以及目标传递函数矩阵。
23、在一实施例中,所述低频控制指令包括低频加速度指令以及低频角加速度指令,所述飞行器的四轴对应的低频加速度指令的幅值不同,所述飞行器的四轴对应的低频角加速度指令的幅值不同;
24、所述变频控制指令包括变频加速度指令以及变频角加速度指令,在所述变频控制指令的持续时间内,所述变频加速度指令的幅值相同,所述变频角加速度指令的幅值相同。
25、在一实施例中,所述响应于飞行器参数的辨识指令,获取低频控制指令下飞行器的第一参数,并基于所述第一参数对优化函数进行迭代计算,获得控制效率优化矩阵的步骤之前,还包括:
26、基于飞行器的三轴对应的角加速度、三轴对应的角速度、三轴对应的速度、三轴对应的转速变化率、机体坐标系下三轴的加速度、各个旋翼的转速、控制效率矩阵、陀螺力矩矩阵以及传递函数矩阵,确定所述优化函数。
27、此外,为实现上述目的,本技术还提供一种飞行器,所述飞行器包括:
28、第一计算模块,用于响应于飞行器参数的辨识指令,获取低频控制指令下飞行器的第一参数,并基于所述第一参数对优化函数进行迭代计算,获得控制效率优化矩阵,其中,所述优化函数由飞行器的控制效率矩阵、陀螺力矩矩阵及传递函数矩阵确定,所述第一参数包括飞行器的待辨识参数以及第一运行参数;
29、更新模块,用于基于控制效率优化矩阵更新所述优化函数,获得更新后的所述优化函数;
30、第二计算模块,用于获取变频控制指令下飞行器的第二参数,并基于所述第二参数对更新后的所述优化函数进行迭代计算,获得陀螺力矩优化矩阵以及传递函数优化矩阵;
31、确定模块,用于基于所述控制效率优化矩阵、陀螺力矩优化矩阵以及所述传递函数优化矩阵,确定目标控制效率矩阵、目标陀螺力矩矩阵以及目标传递函数矩阵。
32、此外,为实现上述目的,本技术还提供一种飞行器参数在线辨识装置,所述飞行器参数在线辨识装置包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的飞行器参数在线辨识程序,所述飞行器参数在线辨识程序被所述处理器执行时实现前述的飞行器参数在线辨识方法的步骤。
33、此外,为实现上述目的,本技术还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有飞行器参数在线辨识程序,所述飞行器参数在线辨识程序被处理器执行时实现前述的飞行器参数在线辨识方法的步骤。
34、本技术通过响应于飞行器参数的辨识指令,获取低频控制指令下飞行器的第一参数,并基于所述第一参数对优化函数进行迭代计算,获得控制效率优化矩阵;接着基于控制效率优化矩阵更新所述优化函数,获得更新后的所述优化函数;而后获取变频控制指令下飞行器的第二参数,并基于所述第二参数对更新后的所述优化函数进行迭代计算,获得陀螺力矩优化矩阵以及传递函数优化矩阵;然后基于所述控制效率优化矩阵、陀螺力矩优化矩阵以及所述传递函数优化矩阵,确定目标控制效率矩阵、目标陀螺力矩矩阵以及目标传递函数矩阵,能够通过优化函数实现飞行器特征参数的在线辨识,提升了飞行器参数辨识的便捷性,使得飞行器在不同工况下达成最佳的飞行性能。
35、同时,由于通过优化函数对飞行器特征参数进行在线辨识,无需设计对应工况下的参数,降低了飞行器特征参数辨识的成本。
- 还没有人留言评论。精彩留言会获得点赞!