一种基于高精地图的矿山无人驾驶规划仿真方法及系统与流程
本发明属于无人驾驶矿卡,尤其涉及一种基于高精地图的矿山无人驾驶规划仿真方法及系统。
背景技术:
1、当前智慧矿山领域的一个重点研究内容是封闭场景下的矿山无人驾驶技术。随着越来越多的矿山采用无人驾驶矿卡进行运输作业,相应的无人驾驶矿卡调度平台对无人驾驶矿卡的调度变得越来越重要。
2、现有的无人驾驶矿卡调度平台对无人驾驶矿卡的调度测试和验证通常需要进行实地测试,然而这种方法存在一些问题:首先,实地测试可能存在安全风险,例如车辆碰撞和人员伤亡等;其次,实地测试需要大量的时间、人力和资源投入。此外,实地测试的环境和条件难以控制,难以复现特定场景和情况。因此,需要一种更安全、更高效、更可控的测试和验证方法。
技术实现思路
1、技术方案
2、为了解决上述背景技术中的缺陷,本发明提出一种基于高精地图的矿山无人驾驶规划仿真方法及系统,采用高精度地图和多种路径规划算法相结合的方式,实现更精确、高效的路径规划和仿真结果;可有效解决,多点装载、多点卸载的矿山运输调度系统,无实车可调、测试成本高、安全隐患大、测试验证效率低、特殊场景难以复现等诸多问题,为优化矿山运维资源配置、提高运输效率提供便捷、可靠的工具。
3、本发明的第一目的是提供一种基于高精地图的矿山无人驾驶规划仿真系统,包括:
4、高精地图解析模块,获取矿山的高精地图,对所述高精地图进行解析得到路径信息,将所述路径信息作为初始条件,进行初始化;
5、位置记录模块,用于动态记录并跟踪每台车辆的实时位置,动态更新当前车辆与相同道路上临近的前后车辆之间的相对位置关系;
6、平台交互模块,接收所述位置记录模块的采样数据,根据所述采样数据,上报车辆数据至调度平台,同时接收并解析调度平台下发指令;
7、道路路径规划模块,接收所述位置记录模块和平台交互模块的数据,将车辆当前位置与调度平台下发的目标点位置作为初始条件,规划出车辆行驶路径;
8、速度规划模块,用下发控制车辆速度信息;
9、任务决策执行模块,用于判定车辆采用何种规划算法,用于动态计算车辆位置;
10、控制中心软件模块,用于控制系统流程的执行与计算。
11、优选地,在高精地图解析模块中,采用dijkstra算法进行初始化。
12、优选地,在速度规划模块中,汇总道路限速、平台限速、不同转弯曲率限速以及固定工况下固定速度基础上,按照最小安全原则下发车辆行驶速度。
13、优选地,所述道路路径规划模块包括:
14、结构化道路路径规划模块,将车辆当前位置与调度平台下发目标点位置作为初始条件,采用初始化后的dijkstra算法规划出车辆行驶路径;
15、非结构化道路路径规划模块,将车辆当前位置与调度平台下发目标点位置作为初始条件,采用hybrid a*算法或reeds-shepp曲线算法规划出车辆行驶路径。
16、本发明的第二目的是提供一种基于高精地图的矿山无人驾驶规划仿真方法,
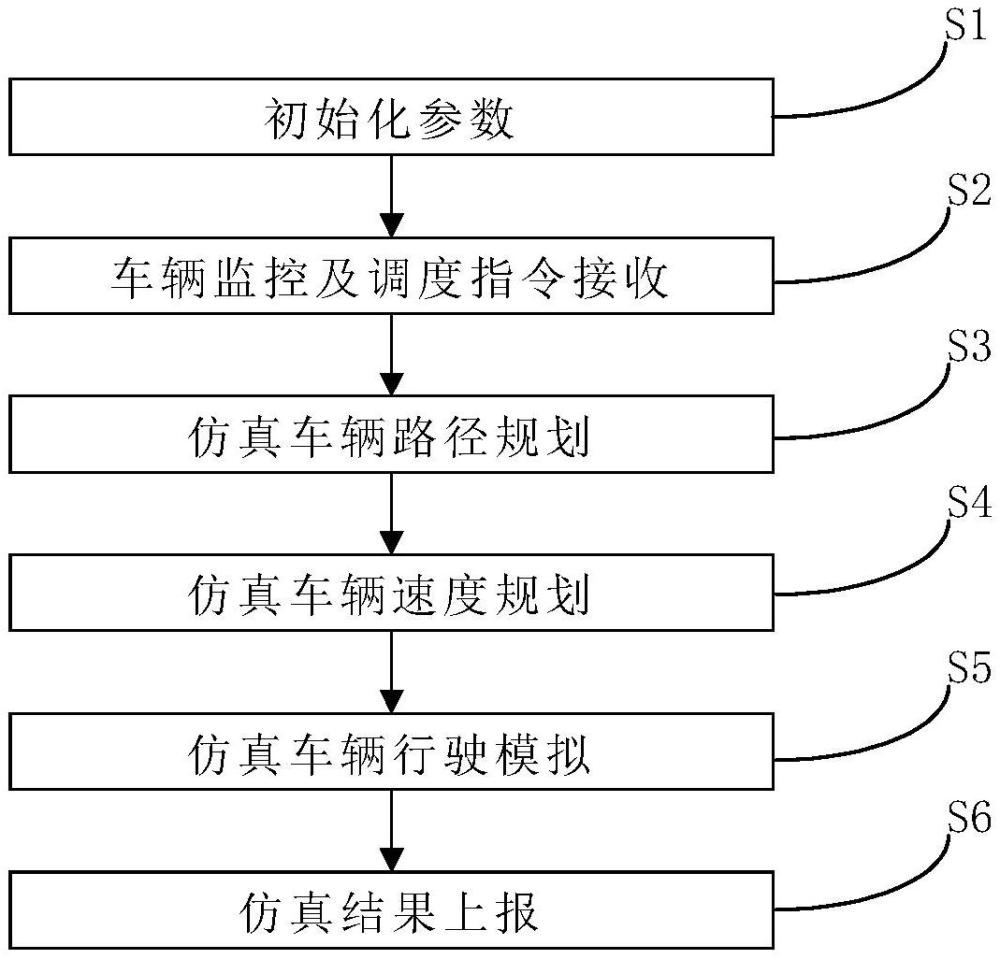
17、包括以下步骤:
18、s1,初始化系统参数;
19、s2,每台车监控并接收调度任务指令;
20、s3,根据当前位置选择不同路径规划算法,并进行仿真车辆的路径规划;
21、s4,根据不同的路径规划算法规划对应行驶速度;
22、s5,控制仿真车辆模型模拟车辆行驶;
23、s6,实时上报仿真过程及仿真结果。
24、优选地,s1包括以下步骤:
25、s11,根据调度平台调度车辆的需求,部署控制中心软件的数量,设置每个控制中心软件的仿真车辆数量,对仿真车辆进行初始化自动编号,编号规则按照公式(1)进行;
26、tno=com+con+num (1)
27、公式(1)中,tno表示车辆自动生成的序号,com表示公司代号,com表示仿真车辆所在的控制中心软件序号,num表示辆编号的递增序号,从1开始递增;
28、s12,对每台仿真车辆建立车辆模型,车辆模型的参数包括车辆模型的长度、宽度,矿卡初始位置、最大前进速度和最大倒车速度;
29、s13,激活每台仿真矿卡按照固定频率上报矿卡信息数据,所述矿卡信息数据包括矿卡位置、执行任务模式、当前车辆限速值、仿真运行时长、本次仿真累计里程、本次仿真累计运载量和当前仿真状态;
30、s14,配置与调度平台通讯的相关参数,建立与调度平台通讯通道,订阅调度平台任务主题。
31、优选地,在s2中,接收的任务指令包括接收当前仿真车辆下一个目标任务点(x,y,z),当前车辆最高行驶速度、清除当前任务、临时驻车、停车让行。
32、优选地,s3包括以下步骤:
33、s31,根据公式(2),结合高精度图离散后的点,判断仿真车辆模型是否在高精地图车道内;
34、
35、公式(2)中,ires表示仿真车辆模型是否在高精地图车道内,ires大于等于1表示在高精地图车道内,否则表示不在高精地图车道内;x,y分别表示仿真车辆模型当前坐标位置;xi,yi分别表示高精地图车道中心线离散后的点在大地2000坐标位置;disi表示离散点所在车道宽度的一半;
36、s32,根据公式(2)判断高精地图下发的任务目标点是否在高精地图车道内;
37、s33,根据公式(3)选择执行规划任务算法;
38、
39、公式(3)中,res1表示采用dijkstra算法,res2表示采用hybrid a*算法,res3表示采用reeds-shepp算法,error表示无法选择算法规划,上报无法规划错误;iresstart表示由公式(2)计算仿真车辆模型是否在高精地图车道内;iresfinish表示调度平台下发终点是否在高精地图车道内,dis表示车辆位置与任务目标位置的欧氏距离;dis_control表示第一预设距离;
40、s34,根据步骤s33选择结果,输出规划最短路径相关结果,包括高精地图车道序号,离散后的点坐标文件,离散后点对应的转弯曲率半径。
41、优选地,在结构化道路上采用高精地图进行描述,将高精地图衔接关系按照公式(4)进行赋值,并作为dijkstra算法输入条件:
42、
43、公式(4)中,weight(u,v)表示高精地图某条车道的权重,该权重包括车道长度,车道高差,车道优先级。
44、优选地,在s4中,根据不同算法预设不同的最大限速;具体为:藉用高精地图最大限速设为dijkstra算法规划道路最高前进速度,不允许dijkstra算法规划道路上倒车行驶;藉用hybrid a*算法进行的路径规划,最大前进速度为第一预设速度,最大倒车速度为第二预设速度;藉用reeds-shepp曲线算法规划道路上,最大前进和倒车速度均为第二预设速度。
45、优选地,在s4中,在非结构化道路上,根据将要行驶距离d、最大加速度amax、目标速度vtarget、最大速度vmax和当前速度vcurrent,使用以下方法计算车辆在不同阶段的目标速度:
46、f.若d≤停车距离dstop,则目标速度vdesired为0,即停车状态;
47、g.若停车距离dstop<d≤加速距离dacc,则目标速度vdesired可通过公式(5)计算:
48、
49、h.如果加速距离dacc<d≤匀速距离dunif,则目标速度vdesired等于目标速度限制,即vdesired=vtarget;
50、i.如果匀速距离dunif<d≤减速距离ddece,则目标速度vdesired可通过以下公式计算:
51、
52、j.如果d>减速距离ddece,则目标速度为0,即停车状态。
53、优选地,在s5中,所述仿真车辆模型按照公式(7)在规划路径上两相邻的离散点间计算车辆行驶轨迹:
54、
55、其中,s表示在t时段内仿真车辆模型行驶距离,vt表示在t时刻仿真车辆模型速度;根据两相路径离散点,采用线性差值法,得到t时刻仿真车辆模型的坐标。
56、优选地,在s5的模拟行驶过程中,仿真车辆会通过调度平台下发的安全距离,建立基于路径规划的安全区域,当安全区域中有其它车辆时,会获取其它车辆速度,按照其前方车辆速度跟车行驶;安全区域按照公式(8)计算:
57、
58、其中,are表示安全行驶区域,width表示安全行驶区域宽度,表示仿真车辆前方安全距离,表示仿真车辆残余路径距离,li表示仿真车辆前方规划路径两个离散点间距。
59、优选地,在s1、s2及s6中,通过消息主题格式,完成仿真车辆与调度平台之间的交互,具体包括,通过配置通讯参数,实现仿真车辆订阅调度平台下发任务指令,包含目标点任务模式、目标点位置及姿态、当前仿真车辆最高行驶速度、清除当前任务、临时驻车、停车让行,取消临时驻车、取消停车让行,实现仿真车辆执行完一个任务后,上报执行结果并等待下一个任务指令。
60、优选地,在s6中,仿真过程具体指按照上报频率,定期上报车辆局部坐标位置(x,y,z),x,y分别为车辆在仿真矿区平面二维坐标,z表示矿区道路上车辆的高程;上报频率按照公式(9)计算;
61、fre=n/(a*d) (9)
62、其中,fre表示上报频率,n表示总车辆数,a表示矿区面积,d表示车辆分布密度;仿真结果包含单车行驶里程、单车仿真运行累计时间。
63、本发明的优点包括:
64、首先,本发明提供了一种更安全的调度算法测试和验证系统和方法,避免了实地测试中可能存在的安全风险。其次,它可以节省大量的时间、人力和资源投入,提高调度算法测试和验证的效率。此外,该系统能够控制仿真环境和条件,便于复现特定场景和情况。最后,该系统的硬件要求较低,可以在较小的硬件支持下实现可靠、稳定的仿真。
65、因此,本发明的基于规划的无人驾驶矿卡快速仿真系统在无人驾驶矿山技术领域具有广阔的应用前景,可以提高矿山无人驾驶系统的调度效率和安全性,为智慧矿山的发展做出贡献。
66、1.快速性:本系统能够快速规划路径和行驶速度,实时响应调度任务,提高矿卡仿真效率。
67、2.稳定性:在保证仿真的真实性的前提下,本系统通过简化感知和简化控制等方式简化了仿真系统,减少了系统的复杂性,降低了出错概率,提高了仿真系统的长期稳定运行能力。
68、3.经济性:系统通过路径规划和速度规划算法,优化矿卡的行驶路径和速度,可以在虚拟环境中快速测试和优化,减少实际使用资源和成本。此外,系统通过一套硬件部署应用即可实现上百台矿卡的仿真模拟,大大降低了仿真硬件的要求,节省了大量硬件资源和费用。
69、4.可靠性:本系统通过仿真环境和算法优化模块,对无人驾驶矿卡进行虚拟仿真,极大提高了调度系统的可靠性和安全性。通过模拟各种场景和不同的工作条件,可以在虚拟环境中验证调度系统的可行性和安全性,避免了潜在的风险和事故发生。
70、总之,本发明通过路径规划和速度规划算法,简化了无人驾驶感知系统及控制系统,通过与调度平台交互及车辆虚拟控制,实现无人驾驶调度平台对虚拟车辆的调度。该系统具有快速、稳定、经济的特点,可用于验证无人驾驶矿卡调度平台的可靠性和经济性。
- 还没有人留言评论。精彩留言会获得点赞!