一种无人机机巢控制方法与流程
本发明涉及无人机,具体为一种无人机机巢控制方法。
背景技术:
1、无人机机巢是一种专门为无人机提供停靠、充电、数据传输和维修等服务的设施,通常具有高度自动化和智能化的特点。
2、公开号为cn113917935b的申请公开了一种无人机机巢控制方法及无人机机巢,方法包括:获取水平摄像模组采集的第一监控图像;对第一监控图像进行识别,得到第一监控图像中的隐患目标以及输电导线目标;确定输电导线目标的导线状态信息;获取垂直摄像模组采集的第二监控图像;对第二监控图像进行识别,确定输电杆塔下方的地面异常情况;基于隐患目标、导线状态信息以及地面异常情况,确定是否需要进行告警;获取垂直摄像模组采集的第三监控图像;对第三监控图像进行识别,得到第三监控图像中的无人机目标,并记录无人机目标的姿态;基于预存的标准无人机姿态,调整无人机目标的姿态。解决了无人机机巢不能对输电通道进行监测以及精确调整无人机飞行姿态的问题。
3、现有的无人机机巢所能达到的最佳路线确定方式为:基于所确定的初始点以及末端点,同时结合无人机本身的避障功能,确定勘测路线,后续飞回时,并不做相关勘测处理,只是单纯回冲充电,此种路线确定方式,不仅会造成无人机电量的相关浪费,还会造成多余的飞行路线,不能达到一个更好的无人机勘测控制效果。
技术实现思路
1、针对现有技术的不足,本发明提供了一种无人机机巢控制方法,解决了原始的方式不仅会造成无人机电量的相关浪费,还会造成多余的飞行路线的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种无人机机巢控制方法,包括以下步骤:
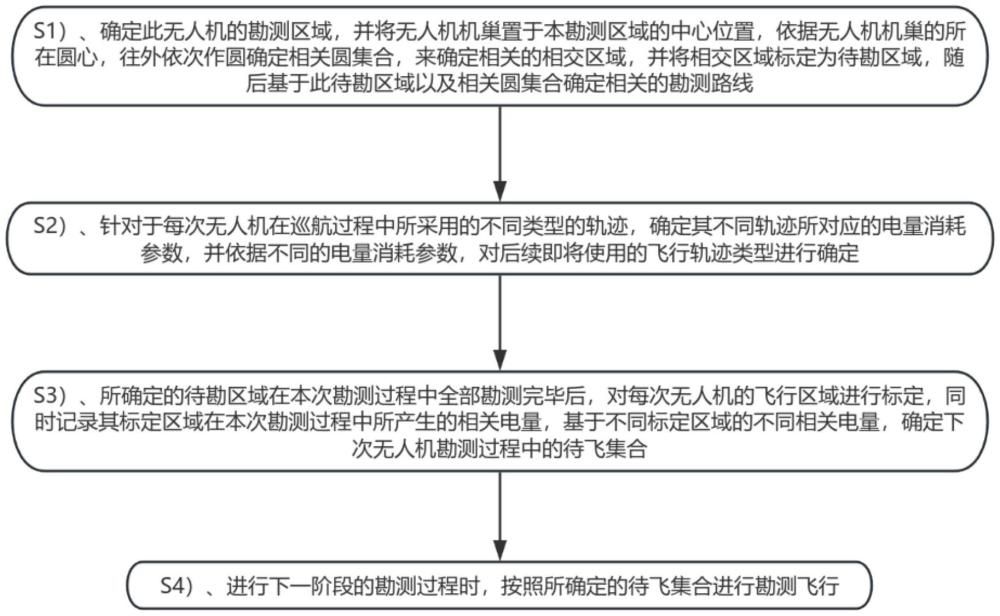
3、s1)、确定此无人机的勘测区域,并将无人机机巢置于本勘测区域的中心位置,依据无人机机巢的所在圆心,往外依次作圆确定相关圆集合,来确定相关的相交区域,并将相交区域标定为待勘区域,随后基于此待勘区域以及相关圆集合确定相关的勘测路线,包括:
4、s11、以所确认的中心位置作为圆心,构建预设圆,且第一组预设圆的半径为x1,其第二组预设圆的半径为2x1,依次往后确认所构建的预设圆的半径,其所构建的若干组预设圆逐渐变大,直至所构建的预设圆将本勘测区域完全包括在内后停止;
5、s12、将所构建的若干组预设圆标定为相关圆集合,将整个相关圆集合与勘测区域的交叉区域标定为待勘区域;
6、s13、确定一组标分线,基于此标分线进行圆形阵列处理产生n组标分线,其阵列点位为相关圆集合的圆心,其中n为预设值,将相关圆集合划分为若干个扇形区域,基于所确定的若干组扇形区域,且扇形区域的总数为偶数,对待勘区域进行划分,并将属于不同扇形区域的待勘区域进行标定,统称为相关区域,将每个相关区域的微扇形的待勘区域标定为微区域;
7、s14、随机选定一组相关区域作为主区域,将主区域相邻的相关区域标定为次区域,将主区域与次区域内所确定的若干个微区域的中心点进行确认,并分别标定为zi以及ck,其中i代表主区域的微区域的中心点,且i=1、2、……、n,其中k代表次区域的微区域的中心点,且k=1、2、……、m,选定主区域的第一组中心点z1作为初始点,再以c2作为第二组移动点,再确定位于主区域的中心点z3作为第三组移动点,依此类推,确定一组主区域与次区域的相关移动飞行轨迹:z1-c2-z3-c4-z5-c6-……-zi-ck-……-z6-c5-z4-c3-z2-c1;
8、s15、本主区域与次区域的移动飞行轨迹确认完毕后,对下一组主区域以及次区域进行选定,将主区域与次区域内所确定的若干个微区域的中心点进行确认,并分别标定为qi以及rk,其中i代表主区域的微区域的中心点,且i=1、2、……、n,其中k代表次区域的微区域的中心点,且k=1、2、……、m,从主区域的第一组中心点q1开始至qk结束,再从对应的rk开始至r1结束,确定其另一种形式的相关移动飞行轨迹:q1-q2-……-qk-rk-……r2-r1,将步骤s14中所确定的相关移动飞行轨迹标定为交叉型轨迹,将本步骤中所确定的相关移动飞行轨迹标定为环流型轨迹;
9、s2)、针对于每次无人机在巡航过程中所采用的不同类型的轨迹,确定其不同轨迹所对应的电量消耗参数,并依据不同的电量消耗参数,对后续即将使用的飞行轨迹类型进行确定,包括:
10、s21、提取至少五组为交叉型轨迹所产生的相关电量消耗参数,将所产生的若干组相关电量消耗参数进行均值处理,并将交叉型轨迹所确定的相关电量均值标定为j1;
11、s22、再提取至少五组为环流型轨迹所产生的相关电量消耗参数,将所产生的若干组相关电量消耗参数进行均值处理,并将环流型轨迹所确定的相关电量均值标定为j2;
12、s23、将j1与j2进行核对,当j1=j2时,不进行任何处理,由系统自行选取相关类型的飞行轨迹,若j1>j2时,则将后续其他未进行勘测的区域均采用交叉型轨迹的方式确定其飞行轨迹,若j1<j2时,则将后续其他未进行勘测的区域均采用环流型轨迹的方式确定其飞行轨迹;
13、s3)、所确定的待勘区域在本次勘测过程中全部勘测完毕后,对每次无人机的飞行区域进行标定,同时记录其标定区域在本次勘测过程中所产生的相关电量,基于不同标定区域的不同相关电量,确定下次无人机勘测过程中的待飞集合;
14、具体方式为:
15、s31、将每次无人机的飞行区域进行标定,确定标定区域,其标定区域包括两组扇形区域;
16、s32、将每组标定区域所使用的相关电量标定为dlv,其中v=1、2、……、p,其中p代表对应标定区域的总个数;
17、s33、并将若干组相关电量进行排序,生成相关电量序列,从相关电量序列的第一组相关电量作为初始电量,从初始电量开始往后依次将相邻的相关电量进行相加,确定总电量zz,并依次确认其总电量zz是否满足:zz>y1,若不满足,则继续相加,直至所相加的总电量zz>y1时停止,将本次所相加的相关电量进行剔除,作为下一阶段的初始电量,将本阶段所确定的若干组相关电量所对应的标记v作为一组待飞集合,其中y1为预设值;
18、s34、采用此种方式,对后续每个不同阶段的待飞集合进行依次确认,并对依次确认的待飞集合进行存储;
19、其步骤s33还包括另一种处理方式,为:
20、s33、将若干组相关电量按照从小至大的方式进行排序,生成相关电量序列,再将相关电量按照从大至小的方式进行排序,生成其相关电量序列的反序列,将相关电量序列与反序列的第一个位置的相关电量相加,确定总电量zz,识别zz是否满足:zz>y1,其中y1为预设值,若满足,则不进行处理,若不满足,则将第二个序列位于第二个位置的相关电量相加,确定总电量,若zz>y1,则将第一个位置的相关电量所对应的标记v作为一组待飞集合,若不满足,直至往后确认的第三个位置的相关电量相加时,其zz才大于y1,那么将前三个位置的相关电量所对应的标记v作为一组待飞集合,以此类推,对后续的若干组待飞集合进行依次确认;
21、s4)、进行下一阶段的勘测过程时,按照所确定的待飞集合进行勘测飞行。
22、本发明提供了一种无人机机巢控制方法。与现有技术相比具备以下有益效果:
23、本发明通过将无人机机巢置于对应勘测区域的中心位置,来生成其相关的预设圆,再对所生成的相关预设圆进行分割,确定若干个扇形区域,再基于扇形区域与勘测区域的交叉区域,确定相关的微区域,再基于扇形区域与相应微区域的相关电位特征,来确定其相关的无人机飞行轨迹路线,且无人机飞行轨迹路线包括两组,一组为交叉型路线,一组为环流型路线,其两组路线各有优点,且能达到较好的无人机勘测效果,能达到自动化控制,无需人工介入,且不会造成多余的飞行路径,使无人机的飞行电量得到充分利用;
24、基于相关不同类型路线所产生的相关电量,来确定后续所使用的最佳类型路线,并以上一阶段的相关运行情况以及耗电情况,来确定下一阶段的待飞集合相关的待飞区域,使后续无人机在飞行过程中,其飞行电量不仅能得到充分利用,还能充分缩减其勘测的具体时长,提升无人机的勘测效果。
- 还没有人留言评论。精彩留言会获得点赞!