一种具有角速度自适应滤波的垂直起降飞机控制方法
本发明属于飞行器控制,具体涉及一种具有角速度自适应滤波的垂直起降飞机控制方法。
背景技术:
1、随着海上作战需求的提高,垂直起降(vtol)飞行器也在航空母舰作战单位中占据了一席之地,该类飞行器可以直接在航空母舰甲板上进行垂直起飞和降落,并不需要滑跃甲板或者弹射器起飞,降落时也不需要拦阻索减速,这样就降低了航空母舰的设计复杂度,不需要研发耗资巨大的蒸汽弹射和电磁弹射技术,此外,两栖攻击舰上也可搭载垂直起降飞机,可以提升两栖作战能力,具有更广泛的应用和更高的存活能力。垂直起降飞机对航母上的空间需求小,因此同样条件下航母可以搭载更多的垂直起降飞机,此外,垂直起降飞机也可以在滑跃甲板上进行短距起飞,可以减少起飞时的航空燃油消耗,增大了垂直起降飞行器的载荷和作战半径,也充分发挥了垂直起降飞行器的独特优势。总的来说,推力矢量垂直起降飞行器不依赖于弹射器、作战半径大,应用场景多,是一种极为优秀的舰载机设计方案。
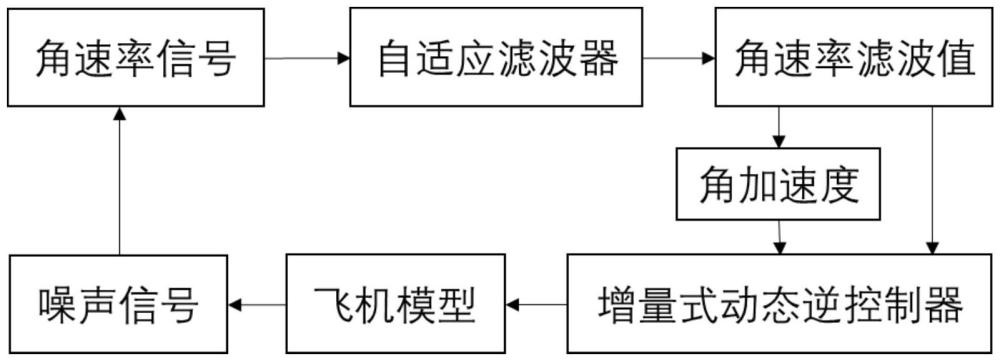
2、相较于常规飞行器的控制律设计,推力矢量型垂直起降飞机结构复杂,非线性明显,其控制律设计更加复杂。已有的控制方法中,增量式非线性动态逆(indi)控制方法作为一种较为新颖的控制策略,已经在垂直起降飞机的控制问题上得到了成功应用。然而,增量式动态逆控制方法是通过反馈飞机状态的加速度信号进行控制,实际应用上,飞机角加速度信号往往由角速率信号差分获取,而角速率信号不可避免地包含噪声干扰。这种情况下,通过加速度信号替代飞行器本体气动模型可能导致控制方法的误差甚至失效。一般飞机进行角加速度测量时通常采用对角速度信号进行微分的方法,但较大的量测噪声会放大加速度信号噪声,甚至造成加速度信号的不可用。为了获得真实的加速度信号,滤波器和状态观测器通常被采用。实际应用中,飞机本体特性往往无法精确获取,也无法得到信号和噪声统计特性的先验知识。本发明公开了一种具有角速度自适应滤波的垂直起降飞机控制方法,以保证在受到噪声干扰情况下推力矢量垂直起降飞机控制的可靠性。
技术实现思路
1、为了克服现有技术的不足,本发明提供了一种具有角速度自适应滤波的垂直起降飞机控制方法,基于增量式非线性动态逆方法设计角速度环控制律,采用基于最小均方误差(lms)的自适应滤波算法对测量得到的角速率信号进行滤波,将滤波后的信号代入indi控制中,并设置仿真条件,验证本发明方法对角加速度的滤波性能和控制方法的有效性。
2、本发明解决其技术问题所采用的技术方案如下:
3、步骤1:对推力矢量垂直起降飞机的发动机相关部件进行定义,以建立推力矢量垂直起降飞机模型;
4、步骤2:通过飞机运动模型建立飞机角速率方程,以增量式动态逆方法推导飞机角速率控制律;
5、步骤3:基于最小均方误差的自适应滤波技术对角速率进行滤波,采用滤波后信号建立角速率控制结构;
6、步骤4:通过数字仿真实验,验证采用自适应滤波方法的垂直起降飞机控制方法有效性。
7、进一步地,所述步骤1具体为:
8、所述推力矢量型垂直起降飞机,具有能够产生矢量推力的发动机系统,它包含三轴承矢量发动机,具有纵向百叶窗结构的升力风扇,以及位于两侧机翼下方的滚转喷管;
9、通过对推力矢量型垂直起降飞机的操纵机构进行建模,得到悬停阶段飞机受到的推进系统力和力矩方程:
10、
11、其中,f表示由推进系统产生的推力,fx,fy,fz分别表示沿机体x轴,y轴和z轴的推力;fnx,ffx表示矢量喷管推力和升力风扇推力沿机体x轴的分量,fny,ffy分别表示矢量喷管推力和升力风扇推力沿机体y轴的分量,fnz,ffz表示矢量喷管推力和升力风扇推力沿机体z轴的分量;μ表示由推进系统作用产生的力矩,l,m,n表示滚转力矩,俯仰力矩和偏航力矩;lroll为由滚转喷管产生的滚转力矩;mn,mf,mroll分别为由矢量喷管,升力风扇,滚转喷管产生的俯仰力矩;nn,nf分别为矢量喷管,升力风扇产生的偏航力矩;fn是矢量喷管喷口的推力,它是关于油门pla的非线性函数△fn=△dn·△pla;ff是升力风扇喷口的推力,它是关于升力风扇油门plaf的非线性函数;froll是滚转喷口的推力,它通过分配油门plaroll与发动机链接,调整推力的大小,通过差动叶片rroll进行两端推力的差动控制,实现滚转力矩lroll=froll·rroll;δn是三轴承矢量喷管的纵向偏转角度,δny是三轴承矢量喷管的侧向偏转角度;δf是升力风扇的纵向偏转角度,δfy是升力风扇的侧向偏转角度;rroll是滚转喷口的差动叶片。
12、进一步地,所述步骤2具体为:
13、通过飞机运动模型和动量矩定理建立飞机角速率方程:
14、
15、其中,ω是相对于惯性坐标系的下的飞机角速率,是飞机的惯性矩;g是与输入相关的操纵效能矩阵;u为控制输入;
16、将飞机角速率方程在(u0,ω0)状态点进行泰勒展开:
17、
18、其中,△u和△ω表示控制输入和角速度状态随时间△t的增量,o(△ω2)表示角速度状态的高阶小项;△ξx视作与状态量相关的扰动;
19、基于泰勒展开式,设计角速率回路增量式动态逆控制律为:
20、
21、其中,g(ω0)是与角速率相关的操纵效能矩阵,是虚拟的期望角加速度信号输入,ωref是期望的角速率状态,k是回路带宽。是参考角速率的导数。
22、进一步地,所述步骤3具体为:
23、设计滤波器如下:
24、y(n)=τt(n)·u(n)
25、其中,u(n)为输入信号取样值,τ(n)为滤波器系数矢量,y(n)为滤波器输出;
26、利用最陡下降算法,沿着性能曲面最速下降方向即负梯度方向调整滤波器强权向量,搜索性能曲面的最小点,计算滤波器权向量的迭代更新公式为:
27、τ(n+1)=τ(n)+2ηε(n)u(n)
28、其中η为步长因子,ε(n)被定义滤波器为输出y(n)与期望响应d(n)之间的误差;
29、得到基于滤波后信号的vtol飞机角速率控制律:
30、
31、其中表示对0时刻角速度的滤波值,表示0时刻角速度滤波值的导数。
32、进一步地,所述步骤4具体为:
33、将高斯白噪声添加到传感器模型中以模拟测量噪声,在vtol飞机悬停阶段下进行仿真,并与indi控制方法对比,验证本发明方法能够有效降低干扰噪声,控制飞机跟踪期望的角速度。
34、本发明的有益效果如下:
35、本发明方法采用自适应滤波器进行预测,通过滤波器得到的角速率信号和微分计算得到的角加速度信号更接近真实值,避免了一般滤波器需要信号和噪声的先验知识,也避免了使用状态观测器进行预测时需要飞机准确本体信息的要求;基于增量式动态逆的控制方法通过加速度反馈进行角速率控制,减少了控制器对模型信息的依赖,取代了与控制无关的气动模型参数,提高控制系统的有效性。本发明能较好的对角速率信号滤波,并完成对垂直起降飞机角速率控制的应用。
- 还没有人留言评论。精彩留言会获得点赞!