一种水下机器人运动控制装置
本发明涉及水下检测机器人控制,具体为一种水下机器人运动控制装置。
背景技术:
1、水下机器人,是水下无人航行器uuv的一种。水下无人航行器uuv技术无论在军事上、还是民用方面都已不是新事物,其研制始于50年代,早期主要用于海上石油与天然气的开发等,军用方面主要用于打捞试验丢失的海底武器如鱼雷。80年代末,随着计算机技术、人工智能技术、微电子技术、小型导航设备、指挥与控制硬件、逻辑与软件技术的突飞猛进,自主式水下航行体auv得到了大力发展。现有的潜艇技术auv机器人,虽已摆脱了系缆的牵绊,但其上升、下降大多通过改变本体在水中浮力即水压舱注水,排水来实现潜水、浮水的。而且通常只有一到两个动力推进器,响应时间慢,不够机动灵活。或者虽然机器能进行一定角度的旋转,但控制烦琐,稳定性差,均无法满足现有的水下运动所需。
2、经检索,现有技术中中国专利cn108082422b公开了水下机器人运动控制装置,包括机身、位置控制器、姿态控制器、主推进器、垂推进器和侧推进器;主推进器、垂推进器和侧推进器均设置于机身上,主推进器的推进方向朝向机身的第一方向,侧推进器的推进方向朝向机身的第二方向,垂推进器的推进方向朝向机身的第三方向,第一方向、第二方向和第三方向两两相互垂直;位置控制器用于控制主推进器、垂推进器和侧推进器工作;姿态控制器用于控制垂推进器和侧推进器工作,该发明新型利用主推进器、垂推进器和侧推进器可以分别驱动机身在三个方向上运动,通过位置控制器和姿态控制器控制垂推进器和侧推进器工作,以实现对机身的调整,使得水下机器人的运动控制更为精确,有效提高水下机器人的作业效率。
3、但是,该发明新型水下机器人运动控制装置通过主推进器、垂推进器和侧推进器分别驱动机身的纵向、垂向和横向三个方向上运动,在水中调节较为单一,而在水中面根据对不同位置对机身进行横摇、纵摇和艏摇回转三个自由度的调节时无法有效的实现机身的横摇、纵摇和艏摇自由度的调节,且水下作业期间无法有效的对水下进行观察以及收集,导致使用率较低,故而提出一种水下机器人运动控制装置来解决上述中所提出的问题。
技术实现思路
1、针对现有技术的不足,本发明提供了一种水下机器人运动控制装置,具备水下机器人本体横向、纵向、垂直、横摇、纵摇和艏摇的六自由度调节,观察收集水下并收集情况等优点,解决了水下机器人运动控制装置通过主推进器、垂推进器和侧推进器分别驱动机身的纵向、垂向和横向三个方向上运动,在水中调节较为单一,而在水中根据对不同位置对机身进行横摇、纵摇和艏摇回转三个自由度的调节时无法有效的实现机身的横摇、纵摇和艏摇自由度的调节,且水下作业期间无法有效的对水下进行观察以及收集,导致使用率较低,且水下作业期间无法有效的对水下进行观察以及收集,导致使用率较低的问题。
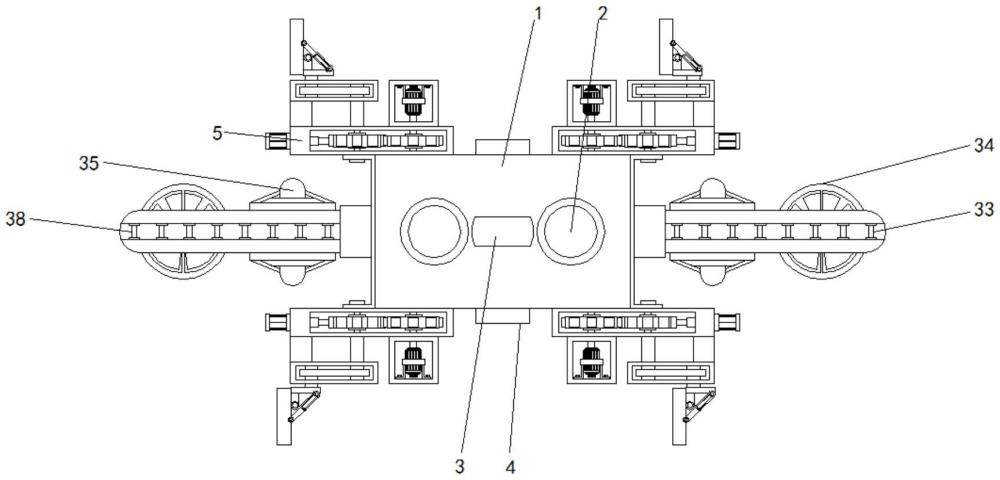
2、为实现上述水下机器人本体横向、纵向、垂直、横摇、纵摇、艏摇的六自由度调节调节,观察收集水下并收集情况目的,本发明提供如下技术方案:一种水下机器人运动控制装置,包括水下机器人本体,所述水下机器人本体上下两侧均镶嵌安装有垂向调节推进器,所述水下机器人本体外侧设置有用于对水下机器人本体横摇和纵摇的第一姿态调节装置和对水下机器人本体艏摇的第二姿态调节装置,所述水下机器人本体内部设置有用于对第一姿态调节装置和第二姿态调节装置控制的控制系统,所述水下机器人本体前端面设置有用于对水下信息收集的收集装置;
3、所述第一姿态调节装置包括螺栓连接在所述水下机器人本体上下两侧的两个第一固定块、固定连接在所述第一固定块一侧的保护箱、固定安装在所述保护箱输出端的驱动电机、固定连接在所述驱动电机输出端的第一转轴、固定套设在所述第一转轴外侧的第一齿轮、啮合连接在所述第一齿轮一侧的第二齿轮、固定套设在所述第二齿轮内壁的第二转轴、传动连接在所述第二转轴远离第二齿轮一侧的皮带、传动连接在所述皮带远离第二转轴一侧的第三转轴、固定连接在所述第三转轴远离皮带一侧的固定板、套设在所述固定板远离第三转轴一侧的第二电动气缸、转动套设在所述第二电动气缸输出端的横摇纵摇横向推进器和转动套设在所述横摇纵摇横向推进器靠近第二电动气缸一端的环形调节板;
4、所述第二姿态调节装置包括固定安装在所述水下机器人本体内壁的四个第三电动气缸、固定连接在所述第三电动气缸输出端的支撑防水架、转动套设在所述水下机器人本体内部的四个套环、固定安装在所述支撑防水架一侧的平衡转动水下叶片和固定安装在所述支撑防水架远离平衡转动水下叶片一侧的竖向驱动叶片。
5、进一步,所述控制系统包括固定安装在所述水下机器人本体内部的控制模块,所述控制模块输出端与信息反馈模块输出端相互电性连接,所述控制模块输出端与姿态控制模块输出端相互电性连接,所述控制模块输出端与声音收集模块输出端相互电性连接,所述控制模块输出端与视频收集模块输出端相互电性连接。
6、进一步,所述控制模块包含有控制信息模块、驱动控制模块、信息收集模块和视频储存模块。
7、进一步,所述收集装置包括镶嵌安装在所述水下机器人本体前端面的摄像头和设置在所述水下机器人本体靠近摄像头一侧的照明组件。
8、进一步,所述照明组件包括镶嵌安装在所述水下机器人本体前端面的两个照明灯,两个所述照明灯分别固定安装在所述摄像头左右两侧。
9、进一步,所述第一固定块一侧设置有用于防止第二齿轮空转进行限位的限位装置,所述限位装置包括固定安装在所述第一固定块一侧的第一电动气缸、固定连接在所述第一固定块内侧的套筒、滑动套接在所述套筒内壁的活动杆和固定连接在所述活动杆靠近套筒一侧的弹簧。
10、进一步,所述第一固定块一侧设置有用于对皮带外侧保护的保护组件,所述保护组件包括固定连接在所述第一固定块一侧的第二固定块。
11、进一步,所述第一转轴下侧分别贯穿保护箱和第一固定块并延伸至内部,所述第二转轴上侧贯穿第一固定块并延伸至外部。
12、进一步,所述第一电动气缸输出端贯穿第一固定块和套筒并延伸至内部。
13、进一步,所述环形调节板下侧固定连接在固定板上侧表面。
14、与现有技术相比,本发明提供了一种水下机器人运动控制装置,具备以下有益效果:
15、1.该水下机器人运动控制装置,通过垂向调节推进器来控制水下机器人本体的垂向移动,第一姿态调节装置用来控制用来控制水下机器人本体的横摇、纵摇和横向移动,第二姿态调节装置用来控制水下机器人本体的艏摇和纵向移动,完成水下机器人本体在水中六个自由度的调节。
16、2.该水下机器人运动控制装置,通过声音收集模块、视频储存模块、视频收集模块和声音收集模块配合摄像头对水下信息观察和收集,且照明灯能提高水下观察能力,解决了水下机器人运动控制装置通过主推进器、垂推进器和侧推进器分别驱动机身的纵向、垂向和横向三个方向上运动,在水中调节较为单一,而在水中根据对不同位置对机身进行横摇、纵摇和艏摇回转三个自由度的调节时无法有效的实现机身的横摇、纵摇和艏摇自由度的调节,且水下作业期间无法有效的对水下进行观察以及收集,导致使用率较低,且水下作业期间无法有效的对水下进行观察以及收集,导致使用率较低的问题。
- 还没有人留言评论。精彩留言会获得点赞!