一种海-空跨域协同智能无人水上搜救系统及控制方法与流程
本发明属于多智能体,尤其涉及一种海-空跨域协同智能无人水上搜救系统及控制方法。
背景技术:
1、随着社会经济的发展,海上旅游、娱乐、作业以及交通等涉海活动不断增加。针对在开放海域落水人员的紧急救援,搜救系统的响应时间、救援手段和自主化水平等因素至关重要,直接影响救援的成功与否。传统的水上救援方式主要包括人工抛投救生圈或救生衣,以及驾驶冲锋舟/救生艇直接进行救援。然而,人工抛投存在距离有限、范围受限、准确度低等问题,可能导致救援无法及时到达或延误;而驾驶冲锋舟/救生艇需要专业人员操控,在水域环境复杂的情况下,受到障碍物或大风浪等因素的限制,可能导致行动受阻甚至造成救援人员的伤亡。
技术实现思路
1、针对现有技术存在的不足,本发明提供一种无人机、无人艇和救生机器人协同智能无人水上搜救系统,解决实时、高效、精准的水上救援问题。
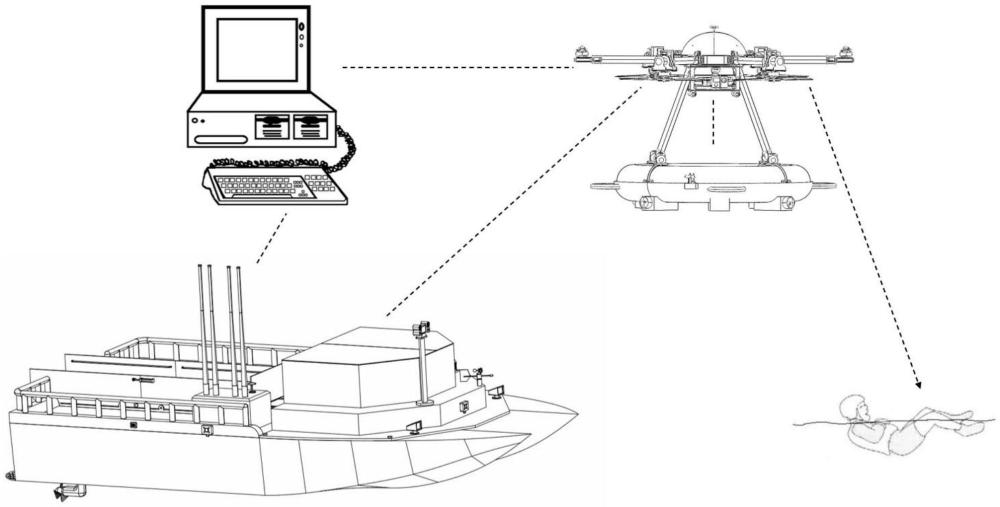
2、一种海-空跨域协同智能无人水上搜救系统,包括多功能无人机、自主避障无人艇、救生机器人和地面站系统;
3、所述多功能无人机用于挂载所述救生机器人,并获取落水人员实时位置信息和图像信息;
4、所述自主避障无人艇用于营救落水人员,并回收救生机器人和多功能无人机;
5、所述救生机器人用于快速自主接近落水人员,并为落水人员提供浮力;
6、所述地面站系统用于监控多功能无人机、自主避障无人艇和救生机器人的实时运行情况,以及向多功能无人机、自主避障无人艇发送指令和信息;
7、进一步地,所述多功能无人机包括第一动力系统、第一传感系统、第一控制系统和抛投装置;
8、所述第一动力系统的输入端与第一控制系统的输出端连接,用于接收第一控制系统的飞行控制指令,并根据飞行控制指令驱动多功能无人机;
9、进一步地,所述第一动力系统包括两块锂电池、六个无刷电机,六个双叶螺旋桨和无人机电调;所述锂电池用于给多功能无人机供电;所述无刷电机和螺旋桨用于给多功能无人机提供升力;所述无人机电调的输入端与第一控制系统的输出端连接,无人机电调的输出端与无刷电机的输入端连接,用于根据第一控制系统发出的飞行控制指令对无刷电机的转速进行调节;
10、所述第一传感系统的输出端与第一控制系统的输入端连接,用于采集图像信息、获取多功能无人机位置信息、方向和速度,将所采集的图像信息、获取的多功能无人机位置信息、方向和速度传输给第一控制系统;
11、进一步地,所述第一传感系统包括第一gps定位模块、惯性导航和三轴云台高清相机;
12、所述第一gps定位模块用于获取多功能无人机的位置信息并发送给第一控制系统;
13、所述惯性导航用于确定多功能无人机的位置信息、方向和速度并发送给第一控制系统,使多功能无人机能够在各种环境下进行自主导航和飞行;
14、所述三轴云台高清相机用于采集图像信息并发送给第一控制系统;
15、所述第一控制系统用于接收第一传感系统发送的图像信息、多功能无人机位置信息、方向和速度,根据图像信息和多功能无人机位置信息确定落水人员实时位置并发送给自主避障无人艇、救生机器人和地面站系统,结合落水人员实时位置向第一动力系统发送飞行控制指令,向抛投装置发送抛投控制指令,向自主避障无人艇发送自主避障无人艇启动控制指令;
16、进一步地,所述第一控制系统包括第一飞行控制器、第一机载计算机、第一机载通信数据传输模块;
17、所述第一飞行控制器用于感知多功能无人机的飞行高度、速度、角度及位置信息,接收第一传感系统发送的多功能无人机位置信息、方向和速度,根据第一机载计算机发送的落水人员实时位置生成飞行控制指令并驱动所述第一动力系统中各无刷电机,实现对多功能无人机的调姿和飞行控制;对抛投装置进行抛投控制;在搜救结束后,根据第一机载通信数据传输模块发送的回收控制指令和自主避障无人艇位置信息实现多功能无人机的回收;
18、所述第一机载计算机用于接收三轴云台高清相机发送的图像信息、第一gps定位模块和惯性导航发送的多功能无人机位置信息,将第一gps定位模块和惯性导航发送的多功能无人机位置信息进行融合,得到融合后的多功能无人机位置信息并根据图像信息获取落水人员实时位置,将落水人员实时位置传递给第一飞行控制器和第一机载通信数据传输模块;在多功能无人机起飞后,生成自主避障无人艇启动控制指令并发送给第一机载通信数据传输模块;
19、所述获取落水人员实时位置的方法具体为:当识别到三轴云台高清相机所拍摄的图像信息中,落水人员位于图像信息的中央位置时,判定此时多功能无人机飞至落水人员正上方,所获取的多功能无人机位置信息即为落水人员的实时位置;
20、所述第一机载通信数据传输模块用于与自主避障无人艇、救生机器人和地面站系统通信,用于接收地面站系统所发送的落水人员初始位置,还用于将接收到的落水人员实时位置传输给自主避障无人艇、救生机器人和地面站系统;将接收的自主避障无人艇启动控制指令发送给自主避障无人艇;接收自主避障无人艇发送的回收控制指令和自主避障无人艇位置信息并转发给第一飞行控制器;
21、所述抛投装置包括四个电磁吸附模块,所述电磁吸附模块输入端与第一控制系统的输出端连接,用于吸附救生机器人,当接收到第一控制系统发送的抛投控制指令时根据抛投控制指令投放救生机器人;
22、进一步地,所述的自主避障无人艇包括第二动力系统、第二传感系统、第二控制系统、救援系统和智能无人机库;
23、所述第二动力系统的输入端与第二控制系统的输出端连接,用于接收第二控制系统的航行控制指令,并根据航行控制指令驱动无人艇;
24、进一步地,所述第二动力系统包括六块铅蓄电池、安装于自主避障无人艇尾部的两个无人艇防水电机、两个无人艇电调和两个无人艇三叶螺旋桨,铅蓄电池用于给自主避障无人艇供电;无人艇防水电机和无人艇三叶螺旋桨用于给自主避障无人艇提供推力;无人艇电调的输入端与第二控制系统的输出端连接,无人艇电调的输出端与无人艇防水电机的输入端连接,用于根据第二控制系统发出的航行控制指令对无人艇防水电机的转速进行调节;
25、所述第二传感系统的输出端与第二控制系统的输入端连接,用于定位自主避障无人艇的位置信息、探测障碍物和采集自主避障无人艇周围的图像信息,并将获得的融合信息传输给第二控制系统;所述融合信息包括自主避障无人艇位置信息、障碍物和无人艇周围的图像信息;
26、所述第二传感系统包括第二gps定位模块、毫米波雷达和高清相机;
27、所述第二gps定位模块用于获取自主避障无人艇的位置信息;
28、所述毫米波雷达用于探测所述自主无人艇前进方向上的障碍物;
29、所述高清相机用于获取自主避障无人艇周围的图像信息;
30、所述第二控制系统用于接收第二传感系统发送的融合信息,并对所接收的融合信息进行处理后,向第二动力系统发送航行控制指令,向救援系统发送收放控制信号,向智能无人机库发送舱门开闭控制信号和充放电控制信号;
31、进一步地,所述第二控制系统包括第二飞行控制器、第二机载计算机和第二机载通信数据传输模块;
32、所述第二飞行控制器用于感知自主避障无人艇的航行速度、角度及位置信息,并根据第二机载计算机发送的航行控制指令驱动所述第二动力系统中各防水电机,实现对所述自主避障无人艇的航向调整和航行控制;根据第二机载计算机发送的收放控制指令、舱门开闭控制指令和充放电指令生成收放控制信号、舱门开闭控制信号和充放电控制信号,并将收放控制信号发送给救援系统,舱门开闭控制信号和充放电控制信号发送给智能无人机库;
33、所述第二机载计算机用于将所接收的融合信息进行处理,并根据第二机载通信数据传输模块发送的落水人员初始位置信息和落水人员实时位置信息生成航行控制指令、收放控制指令、舱门开闭控制指令和充放电指令并将航行控制指令、收放控制指令、舱门开闭控制指令和充放电指令反馈给第二飞行控制器;
34、进一步地,所述第二机载计算机还生成回收控制指令,并将回收控制指令和自主避障无人艇位置信息发送给第二机载通信数据传输模块;
35、所述第二机载通信数据传输模块用于将自主避障无人艇与多功能无人机和地面站系统通信,获取所述地面站系统提供的落水人员初始位置信息和多功能无人机提供的落水人员实时位置信息,并将其反馈给所述第二机载计算机;接收回收控制指令和自主避障无人艇位置信息转发给多功能无人机的第一机载通信数据传输模块;
36、所述救援系统的输入端与第二控制系统输出端连接,根据第二控制系统传输的收放控制信号来营救落水人员和回收所述救生机器人;
37、所述救援系统包括两个长行程电推杆、两个短行程电推杆和两段式可升降传送带;
38、所述长行程电推杆用于收放第一段传送带;
39、所述短行程电推杆用于收放第二段传送带;
40、所述两段式可升降传送带用于传送落水人员和救生机器人上艇;
41、所述智能无人机库的输入端与第二控制系统输出端连接,根据第二控制系统发送的舱门开闭控制信号控制舱门的打开与闭合,同时当舱门打开时释放多功能无人机,舱门关闭时固定多功能无人机,并根据充放电控制信号为库内多功能无人机充电;
42、进一步地,所述智能无人机库包括充电装置和固定装置;
43、所述充电装置,用于给降落在无人机库内的多功能无人机充电;
44、所述固定装置,用于固定降落在无人机库内的多功能无人机;
45、所述救生机器人包括第三动力系统、跟随控制系统和救生圈装置;
46、所述第三动力系统输入端与跟随控制系统输出端连接,用于接收跟随控制系统的控制指令,并根据控制指令驱动救生机器人;
47、进一步地,所述第三动力系统包括八块锂电池、四个救生机器人防水有刷电机、四个救生机器人电调和四个救生机器人三叶螺旋桨,锂电池用于给救生机器人供电;救生机器人防水有刷电机和四个救生机器人三叶螺旋桨用于给救生机器人提供推力;救生机器人电调的输入端与跟随控制系统的输出端连接,救生机器人电调的输出端与救生机器人防水有刷电机的输入端连接,用于根据跟随控制系统发出的控制指令对救生机器人防水有刷电机的转速进行调节;
48、所述跟随控制系统用于接收无人机发送的落水人员实时位置,并发出控制指令给第三动力系统,驱动救生机器人向落水人员靠近;
49、进一步地,所述跟随控制系统包括第三gps定位模块、stm32单片机和第三机载通信数据传输模块;
50、所述第三gps定位模块用于获取救生机器人位置,并将其反馈给所述stm32单片机;
51、所述第三机载通信数据传输模块用于将救生机器人通过所述第一机载通信数据传输模块与多功能无人机通信,获取所述多功能无人机提供的落水人员实时位置,并将其反馈给所述stm32单片机;
52、所述stm32单片机用于处理第三机载通信数据传输模块反馈的落水人员实时位置和第三gps定位模块反馈的救生机器人位置,向第三动力系统中各防水有刷电机发送控制指令,驱动救生机器人向落水人员位置靠近;
53、所述救生圈装置,包括带动力系统的救生圈固定底座和一个救生圈,可为落水人员提供浮力;
54、进一步地,所述带动力系统的救生圈固定底座用于承载并夹紧救生圈,带动救生圈装置向落水人员位置靠近;所述救生圈用于为落水人员提供浮力;
55、所述地面站系统包括显示系统、地面端控制系统、警报系统和系统通信数据链地面端;
56、所述显示系统包括显示屏和电源装置,连通系统通信数据链地面端,用于显示多功能无人机、自主避障无人艇和救生机器人的实时运行信息;
57、所述地面端控制系统包括计算机、内置面板、外接键盘和鼠标,地面端控制系统连通系统通信数据链地面端,用于接收警报系统发送的落水人员的初始位置信息,确认后将落水人员的初始位置信息发送给系统通信数据链地面端;生成多功能无人机的启动或停止控制指令并发送给系统通信数据链地面端;
58、进一步地,若整个海-空跨域协同智能无人水上搜救系统出现无法自主运行的状况时,可人为介入,利用地面端控制系统通过系统通信数据链地面端向多功能无人机和自主避障无人艇发送启动或停止控制指令;
59、所述系统通信数据链地面端用于将地面站系统通过所述第一机载通信数据传输模块与所述多功能无人机通信,通过第二机载通信数据传输模块与自主避障无人艇通信,向多功能无人机和自主避障无人艇传输启动控制指令和落水人员初始位置;
60、所述警报系统与地面端控制系统连接,通过网络终端与相关部门联网,当警报系统检测到落水信息后,进行预警并将落水人员初始位置信息反馈给地面端控制系统。
61、本发明还提供了一种海-空跨域协同智能无人水上搜救控制方法,应用于上述的一种海-空跨域协同智能无人水上搜救系统实现,包括:
62、s01.地面站系统的警报系统检测到落水信息,并将落水人员初始位置信息反馈给地面端控制系统;
63、s02.地面站系统的地面端控制系统确认落水信息,并将落水人员初始位置信息发送给多功能无人机和自主避障无人艇,向多功能无人机发送启动控制指令;
64、s03.多功能无人机和自主避障无人艇接收地面站系统所发送的落水人员初始位置信息同时无人机接收到启动控制指令,智能无人机机库舱门打开;
65、s04.多功能无人机携带救生机器人起飞,向落水人员初始位置前进,起飞后,多功能无人机向自主避障无人艇发送启动控制指令;
66、s05.自主避障无人艇接收多功能无人机发送的启动控制指令,无人艇启动,向落水人员初始位置前进;
67、s06.多功能无人机抵达落水人员初始或实时位置上空,三轴高清相机检测落水人员是否在初始或实时位置,是则执行步骤s071,否则执行步骤s072;
68、s071.多功能无人机抛下救生机器人,并向救生机器人和自主避障无人艇发送落水人员实时位置信息,执行步骤s08;
69、s072.多功能无人机以落水人员初始位置为圆心,按系统预设的半径值递增进行搜索,若发现落水人员,则获取落水人员实时位置信息并执行步骤s06,否则继续搜索,当搜索半径达到预设的阈值时,结束搜索,并将搜索结果反馈给地面站系统,执行步骤s12;
70、s08.救生机器人和自主避障无人艇接收多功能无人机发送的落水人员实时位置信息,并向落水人员靠近;
71、s09.救生机器人抵达落水人员所在位置,营救落水人员,等待自主无人救生艇抵达;
72、s10.自主避障无人艇抵达落水人员位置,艇上第二控制系统向救生系统发送收放控制指令;
73、s11.自主避障无人艇的救援系统接收第二控制系统收放控制指令,启动并释放可升降传送带,营救落水人员上艇并回收救生机器人;
74、s12.自主避障无人艇向多功能无人机发送回收控制指令和自主避障无人艇的实时位置;
75、s13.多功能无人机接收自主避障无人艇所发送的回收控制指令,并获取无人艇实时位置,而后降落在自主避障无人艇的智能无人机库;
76、s14.自主避障无人艇返回岸边或船边初始点。
77、本发明的有益效果如下:
78、1、本发明以无人机、无人艇和救生机器人为载体,设计的协同无人水上救生系统为海上、湖泊和河流救援提供了一种自主、高效、精准的救援方案。
79、2、本发明中,多功能无人机可通过gps和目标检测技术对落水人员进行实时定位,将实时其位置信息发送给无人艇和救生机器人,多功能无人机还可携带救生机器人并将其抛投给落水人员,使营救更高效、精准。
80、3、本发明中,自主避障无人艇可通过毫米波雷达进行障碍物探测,并通过控制系统进行路径规划,有效提升救援效率。
81、4、本发明中,救生机器人具有动力系统,可根据无人机发送的落水人员实时信息向落水人员靠近,减少了落水人员的体能损耗,有效提升救援精准度。
- 还没有人留言评论。精彩留言会获得点赞!