一种无人机自动飞行检测装置及方法与流程
本发明涉及无人机检测设备,具体是一种无人机自动飞行检测装置及方法。
背景技术:
1、无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机;在无人机的研发和生产过程中均需要对无人机飞行性能进行检测,现有技术中无人机飞行检测都是室外无人区域飞行,因在外受天气影响很大,雷雨天都不能在外测试飞行。从而根据飞行需求在室内模拟室外环境进行无人机试飞。有室内的环境,测试飞行不受天气环境的影响,而弊端是飞行需要人员控制飞机飞行,飞行的空间有限,进出人员比较多,存在飞行的飞机对人有一定的伤害,同时失控的飞机撞击也对产品有一定的损失,且在室内进行飞行检测时难以像在户外有各种方向的气流对无人机飞行造成影响,因此难以检测无人机飞行的平衡性能。
技术实现思路
1、本发明的目的在于提供一种无人机自动飞行检测装置及方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
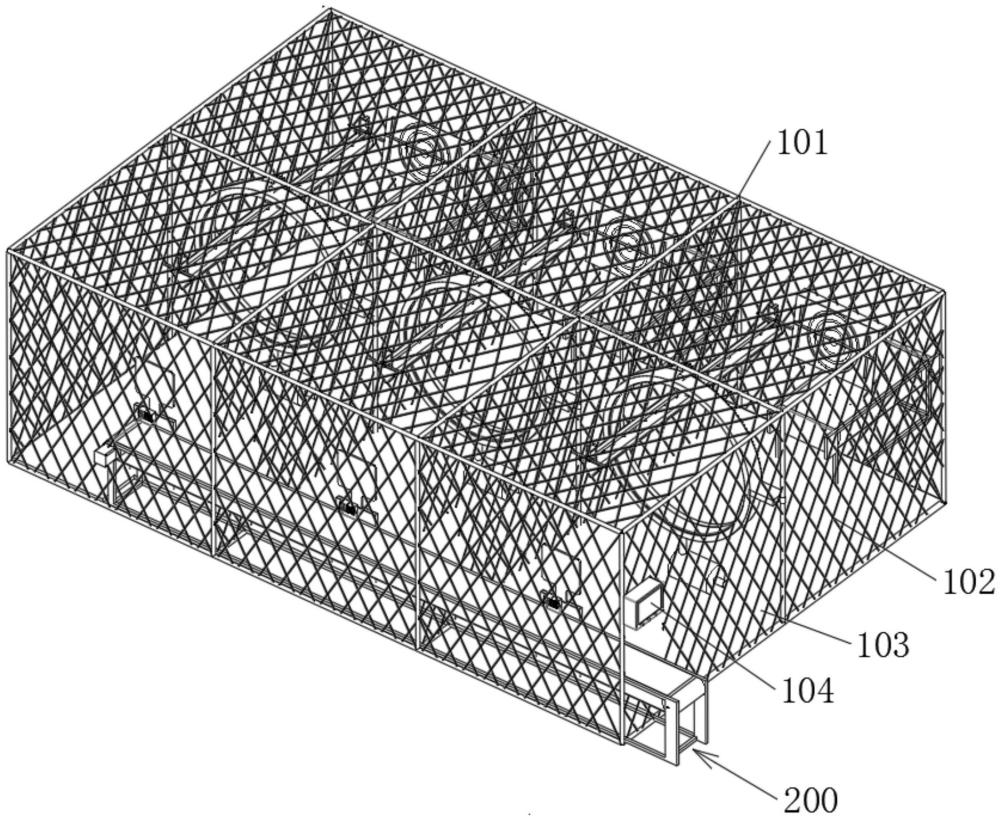
3、一种无人机自动飞行检测装置,包括防护机构,所述防护机构中固定设置有感应机构,所述防护机构内部等距离固定设置有三个风向调节机构,所述风向调节机构的一侧设置有送出机构;
4、所述防护机构包括飞行区域架,所述飞行区域架中等分为三个飞行区域空间,所述飞行区域架的架体上固定连接有防飞网,所述飞行区域架的底部固定连接有海绵板,所述感应机构包括输送架一,所述输送架一的两端均转动连接有转动辊一,两个所述转动辊一之间套接有传入皮带,一个所述转动辊一的端部中心位置处固定连接有驱动电机一的输出端,所述输送架一顶部一侧固定连接有传感器一、传感器二和传感器三,所述飞行区域架的侧壁上固定设置有控制器,控制器中的控制系统是通过plc程序编辑的,主要输入信息是传感器检测的信号信息,输出端一是对电机的转动和停止进行控制,输出端二是对气动二维码板下的电动杆一进行伸缩控制,输出端三是对风向调节机构中伺服电机控制以调节飞行检测的风向,输出端四是对电动杆二控制,以调节飞行检测时的排风口大小,从而改变风速大小。
5、进一步在于,所述输送架一和飞行区域架的所搭建材料为铝合金。
6、进一步在于,相邻两个所述飞行区域之间通过防飞网相分隔,所述防飞网的所制材料为尼龙绳编织网。
7、进一步在于,所述传感器一、传感器二和传感器三的一侧均设置有二维码板,所述二维码板的底部固定连接有电动杆一,所述电动杆一的外部套接有用于收纳二维码板的收纳壳,所述传感器一、传感器二和传感器三为接近式位置传感器。
8、进一步在于,所述风向调节机构包括腔环,所述腔环的侧壁上固定连接有与飞行区域架相固定套接的套接块,所述腔环的内壁上开设有密封槽,所述密封槽中转动套接有旋动环板,所述旋动环板的内壁上固定连接有分通管,所述分通管的底部固定连接有与其内部相连通的输风壳,所述输风壳顶部固定连接有与旋动环板内壁相固定连接的加强柱,所述输风壳的底部开设有出风口,所述旋动环板的外部固定套接有齿环,所述齿环顶端啮合连接有直齿轮,所述直齿轮的中心位置处固定连接有伺服电机的输出端,所述腔环的底部固定连接有连通管,所述连通管的底端固定连接有气泵的输出端。
9、进一步在于,所述输风壳的两侧均滑动设置有挡风板,所述挡风板的两端均固定连接有滑动柱,所述滑动柱的外部滑动套接有滑槽板,所述滑槽板的顶部固定连接有电动杆二,所述电动杆二顶端固定连接有与输风壳顶部相固定连接的定位架。
10、进一步在于,所述挡风板的两端均滑动套接有限位板,所述限位板与输风壳的侧壁固定连接。
11、进一步在于,所述送出机构包括输送架二,所述输送架二的两端均转动连接有转动辊二,两个所述转动辊二之间套接有传出皮带,一个所述转动辊二的端部固定连接有驱动电机二的输出端,所述输送架二顶部固定连接有检测图片。
12、一种无人机自动飞行检测的操作方法,具体包括如下步骤:
13、步骤一:通过驱动电机一驱动传入皮带滚动,从而能对无人机进行传输,当无人机被送至传感器一旁边时被感应到后,传入皮带停止传输,然后电动杆一带动二维码板从收纳壳中伸出,无人机摄像头扫描到二维码启动内部自动飞行程序自动进行飞行检测。
14、步骤二:将第二架无人机放入到传入皮带上后,按控制器设置的时间满足传感器一等待时间超过两分钟,第二无人机被传送到传感器一位置,让电动杆一启动伸出二维码板让第二无人机自动起飞。
15、步骤三:如果无人机流入传入皮带比前一台无人机小于两分钟大于一分钟,则传感器二开始感应获取信息,然后通过控制器控制驱动电机一停止运行,然后启动传感器二位置的二维码板上升,使无人机在第二个飞行区域进行飞行检测。
16、步骤四:当无人机流入传入皮带比第二台无人机流入时间小于一分钟时,则传感器三开始感应获取信息,控制驱动电机一停止后,启动传感器三位置的二维码板上升,使得无人机能在第三飞行区域进行飞行检测。
17、与现有技术相比,本发明的有益效果是:
18、1、通过驱动电机一驱动传入皮带滚动,从而能对无人机进行传输,当无人机被送至传感器一旁边时被感应到后,传入皮带停止传输,然后电动杆一带动二维码板从收纳壳中伸出,无人机摄像头扫描到二维码启动内部自动飞行程序自动进行飞行检测,将第二架无人机放入到传入皮带上后,按控制器设置的时间满足传感器一等待时间超过两分钟,第二无人机被传送到传感器一位置,让电动杆一启动伸出二维码板让第二无人机自动起飞,如果无人机流入传入皮带比前一台无人机小于两分钟大于一分钟,则传感器二开始感应获取信息,然后通过控制器控制驱动电机一停止运行,然后启动传感器二位置的二维码板上升,使无人机在第二个飞行区域进行飞行检测,这样循环使得无人机能实现自动起飞,不需要人员控制,为了保障飞行区域人员安全,每个飞行区域的外部是通过编织的防飞网进行覆盖,这样能防止区域外的人员误入到飞行区,也能防止飞行的飞机因故障飞出飞行区域,防飞网还能保护飞机的撞击,让飞机可以挂在网上,从而能在检测时保护产品。
19、2、在无人机在飞行区域内进行飞行检测时,通过气泵和连通管能对腔环中输送气流,通过分通管能将气流排入到输风壳中,接着通过出风口输出高速空气,因此能模拟户外刮风对无人机飞行的影响,通过伺服电机的输出端能带动直齿轮驱动齿环和旋动环板在腔环中旋转,因此通过旋动环板带动输风壳围绕着腔环中心点旋转,从而能够根据需要来调节出风口的方向,通过改变风向能对无人机飞行进行多方向的吹风检测,不同方向的风力会对无人机的飞行稳定性产生不同影响,使得无人机在飞行过程中可能会出现不稳定的漂移或抖动,通过调节风向后,无人机对检测图片进行拍照,之后通过分析拍摄照片的来判断无人机在不同风向下的稳定性;通过控制电动杆二升降带动滑槽板同时升降,当滑槽板下降时能带动两个滑动柱相互滑动靠近,通过滑动柱带动相对应的挡风板于限位板中滑动,通过两个挡风板端部相滑动靠近,使得挡风板能对出风口的宽度大小进行调节,当出风口越窄时,风速会越大,从而对无人机飞行状态和路径造成的影响和偏差会越大,因此通过调节出风口的大小能用于检测无人机在室内飞行的平衡性。
- 还没有人留言评论。精彩留言会获得点赞!