一种履带推土机转向性能动态仿真模拟方法及系统
本发明涉及计算机数据处理,特别涉及一种履带推土机转向性能动态仿真模拟方法及系统。
背景技术:
1、履带推土机作为工程机械的关键机种之一,普遍应用于交通运输、矿产开采、农田农业、水利及城乡建设等领域。履带推土机作业的典型路面有沼泽、滩涂和砂壤等,在这些路面作业时,履带推土机直行的稳定性可以保证,然而在转向时,由于这些路面的含水率较大,路面可能无法持续给履带推土机提供足够的附着力进行转弯,可能会出现打滑等现象,甚至是侧翻,严重影响履带推土机作业的安全性。
2、因此,亟需一种解决办法。
技术实现思路
1、本发明提供一种履带推土机转向性能动态仿真模拟方法及系统,当履带推土机作业时,基于履带推土机未来的下一个转向路线、转向路线上的路况信息以及履带推土机的性能参数,进行转向性能动态仿真模拟,获取模拟结果,基于模拟结果,确定最佳转向控制策略,当履带推土机开始转向路线行驶时,基于最佳转向控制策略,对履带推土机进行相应的转向控制,保证履带推土机以最佳性能沿履带推土机未来的下一个转向路线进行转向,提升了履带推土机作业时转向的稳定性,提升了履带推土机作业的安全性。
2、本发明提供一种履带推土机转向性能动态仿真模拟方法,包括:
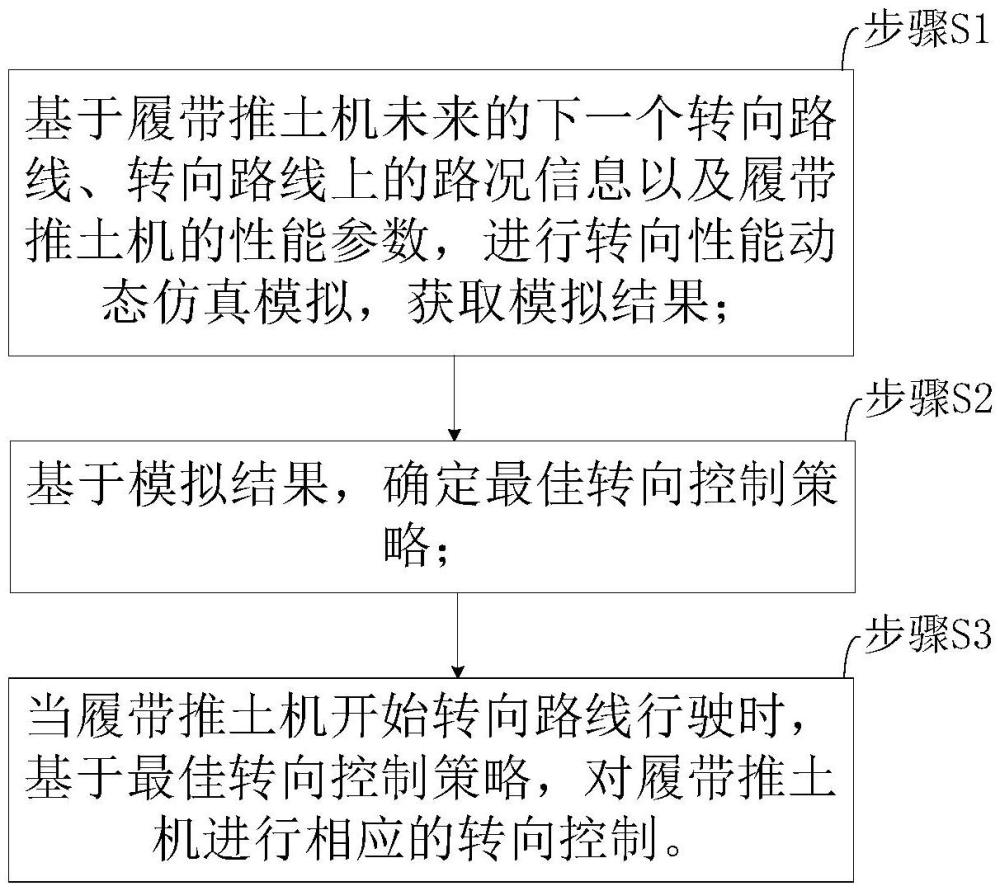
3、基于履带推土机未来的下一个转向路线、转向路线上的路况信息以及履带推土机的性能参数,进行转向性能动态仿真模拟,获取模拟结果;
4、基于模拟结果,确定最佳转向控制策略;
5、当履带推土机开始转向路线行驶时,基于最佳转向控制策略,对履带推土机进行相应的转向控制。
6、优选的,基于履带推土机未来的下一个转向路线、转向路线上的路况信息以及履带推土机的性能参数,进行转向性能动态仿真模拟时,还包括:
7、当当前进入人工介入时机时,供用户查看模拟实体;
8、当用户在第一时间段内查看模拟实体的视角序列符合视角序列条件时,对模拟实体上在视角序列中的各第一视角下的可视内容以及用户的属性信息进行特征提取,获得多个特征值;
9、基于各特征值,生成多个视角建立条件;
10、基于各视角建立条件,建立查看模拟实体的多个第二视角;每一第二视角至少符合一个视角建立条件;
11、在第二时间段内引导用户依次分别以各第二视角查看模拟实体;第二时间段在第一时间段之后;
12、当用户在第三时间段内持续以任一第二视角查看模拟实体时,供用户查看对应第二视角下的可视内容的可配置模拟信息;第三时间段在第二时间段之后;
13、控制模拟实体响应用户基于可配置模拟信息输入的模拟配置指令;
14、其中,人工介入时机包括:
15、转向路线的剩余沿驶时长大于等于时长阈值;
16、且/或,转向路线、路况信息以及性能参数共同表征出的转向复杂度大于等于复杂度阈值;
17、且/或,用户输入人工介入请求;
18、视角序列条件包括:
19、视角序列中第i+1个第一视角与第i个视角之间的重叠视角下可视模拟实体在第i+1个第一视角的产生时刻产生的增量模拟内容;i=1,2,3,…,n-1;n为视角序列中第一视角的总数目;
20、且,视角序列中至少一对局部视角序列互为倒序。
21、优选的,所述基于各特征值,生成多个视角建立条件,包括:
22、解析各特征值的多个特征值类型;
23、从归类规则库中确定各特征值类型对应的多个归类规则;
24、基于各归类规则,对各特征值进行归类,获得多个特征值集;
25、构建各特征值集各自的特征描述向量;
26、从视角建立条件库中确定各特征值集各自的特征描述向量各自对应的多个条件项;
27、基于各条件项,确定多个视角建立条件;每一条件项作为一个视角建立条件。
28、优选的,所述基于模拟结果,确定最佳转向控制策略,包括:
29、解析模拟结果中的多个转向性能模拟信息;
30、基于标准评价体系,对各转向性能模拟信息进行性能评价,获取各转向性能模拟信息各自的性能评价值;
31、从策略决策知识库中确定多个策略决策知识的知识适用条件;
32、基于最大性能评价值的转向性能模拟信息符合的知识适用条件对应的策略决策知识,确定最佳转向控制策略。
33、优选的,履带推土机转向性能动态仿真模拟方法,还包括:
34、对转向路线上的路况信息以及履带推土机的性能参数进行更新;
35、基于履带推土机未来的下一个转向路线、更新后的转向路线上的路况信息以及更新后的履带推土机的性能参数,重新进行转向性能动态仿真模拟。
36、本发明提供一种履带推土机转向性能动态仿真模拟系统,包括:
37、模拟模块,用于基于履带推土机未来的下一个转向路线、转向路线上的路况信息以及履带推土机的性能参数,进行转向性能动态仿真模拟,获取模拟结果;
38、确定模块,用于基于模拟结果,确定最佳转向控制策略;
39、控制模块,用于当履带推土机开始转向路线行驶时,基于最佳转向控制策略,对履带推土机进行相应的转向控制。
40、优选的,模拟模块基于履带推土机未来的下一个转向路线、转向路线上的路况信息以及履带推土机的性能参数,进行转向性能动态仿真模拟时,还执行包括:
41、当当前进入人工介入时机时,供用户查看模拟实体;
42、当用户在第一时间段内查看模拟实体的视角序列符合视角序列条件时,对模拟实体上在视角序列中的各第一视角下的可视内容以及用户的属性信息进行特征提取,获得多个特征值;
43、基于各特征值,生成多个视角建立条件;
44、基于各视角建立条件,建立查看模拟实体的多个第二视角;每一第二视角至少符合一个视角建立条件;
45、在第二时间段内引导用户依次分别以各第二视角查看模拟实体;第二时间段在第一时间段之后;
46、当用户在第三时间段内持续以任一第二视角查看模拟实体时,供用户查看对应第二视角下的可视内容的可配置模拟信息;第三时间段在第二时间段之后;
47、控制模拟实体响应用户基于可配置模拟信息输入的模拟配置指令;
48、其中,人工介入时机包括:
49、转向路线的剩余沿驶时长大于等于时长阈值;
50、且/或,转向路线、路况信息以及性能参数共同表征出的转向复杂度大于等于复杂度阈值;
51、且/或,用户输入人工介入请求;
52、视角序列条件包括:
53、视角序列中第i+1个第一视角与第i个视角之间的重叠视角下可视模拟实体在第i+1个第一视角的产生时刻产生的增量模拟内容;i=1,2,3,…,n-1;n为视角序列中第一视角的总数目;
54、且,视角序列中至少一对局部视角序列互为倒序。
55、优选的,所述模拟模块基于各特征值,生成多个视角建立条件,包括:
56、解析各特征值的多个特征值类型;
57、从归类规则库中确定各特征值类型对应的多个归类规则;
58、基于各归类规则,对各特征值进行归类,获得多个特征值集;
59、构建各特征值集各自的特征描述向量;
60、从视角建立条件库中确定各特征值集各自的特征描述向量各自对应的多个条件项;
61、基于各条件项,确定多个视角建立条件;每一条件项作为一个视角建立条件。
62、优选的,所述确定模块基于模拟结果,确定最佳转向控制策略,包括:
63、解析模拟结果中的多个转向性能模拟信息;
64、基于标准评价体系,对各转向性能模拟信息进行性能评价,获取各转向性能模拟信息各自的性能评价值;
65、从策略决策知识库中确定多个策略决策知识的知识适用条件;
66、基于最大性能评价值的转向性能模拟信息符合的知识适用条件对应的策略决策知识,确定最佳转向控制策略。
67、优选的,履带推土机转向性能动态仿真模拟系统,还包括:
68、更新模拟模块,用于包括:
69、对转向路线上的路况信息以及履带推土机的性能参数进行更新;
70、基于履带推土机未来的下一个转向路线、更新后的转向路线上的路况信息以及更新后的履带推土机的性能参数,重新进行转向性能动态仿真模拟。
71、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
72、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!