一种基于北斗技术的输电线路无人自主巡检方法与流程
本发明涉及输电线路自主巡检的,尤其涉及一种基于北斗技术的输电线路无人自主巡检方法。
背景技术:
1、随着社会的不断发展,电力系统作为支撑社会运行的重要基础设施之一,扮演着至关重要的角色。其中,输电线路作为电力系统的核心组成部分,其稳定运行对社会各个领域的正常运转至关重要。然而,传统的输电线路巡检方式存在一系列问题,例如人力资源投入大、巡检周期长、效率低下等,这些问题对电力系统的运行和维护带来了一定的挑战。在这种背景下,研究基于北斗技术的输电线路无人自主巡检方法具有重要意义。北斗技术是我国自主研发的卫星导航定位系统,具有全球覆盖、高精度等优势,在多个领域有着广泛的应用前景。将北斗技术应用于输电线路无人自主巡检,可以有效解决传统巡检方式存在的问题,提高巡检的效率和准确性,对电力系统的安全稳定运行具有积极的推动作用。鉴于此,本发明提出一种基于北斗技术的输电线路无人自主巡检方法,通过将人工智能与北斗导航技术相融合,实现对输电线路的全方位自主监测,减少人力资源的投入,降低了巡检的成本。
技术实现思路
1、有鉴于此,本发明提供一种基于北斗技术的输电线路无人自主巡检方法,目的在于:1)基于输电线路中开关的逻辑关系构建区域输电线路网络拓扑,并将不同节点之间的输电路径构成输电通路,将节点之间的输电路径转换为邻接矩阵,根据不同节点之间的邻接值表征节点之间是否存在输电路径,并对邻接矩阵进行遍历,得到由不同节点构成的粗粒度巡检路径,利用北斗导航技术将粗粒度巡检路径映射到地图上,得到无人巡检路径,实现基于输电线路中节点连通关系的无人巡检路径生成;2)无人机在巡检过程中实时采集输电线路图像,并基于分层尺度以及不同颜色空间的颜色值,对输电线路图像进行分层滤波以及自适应伽马校正处理,过滤所采集图像中的噪声信息并增强输电线路图像中不同像素之间的对比图,对预处理后的输电线路图像进行锐化处理,提高图像清晰度,并基于像素梯度结构的自相关矩阵选取表征线路轨迹的像素点作为输电线路轨迹,将输电线路轨迹作为循迹目标,在无人机巡检过程中对巡检姿态进行实时自主调整,提高无人机巡检轨迹与输电线路轨迹的重合度,进而提高巡检效率。
2、实现上述目的,本发明提供的一种基于北斗技术的输电线路无人自主巡检方法,包括以下步骤:
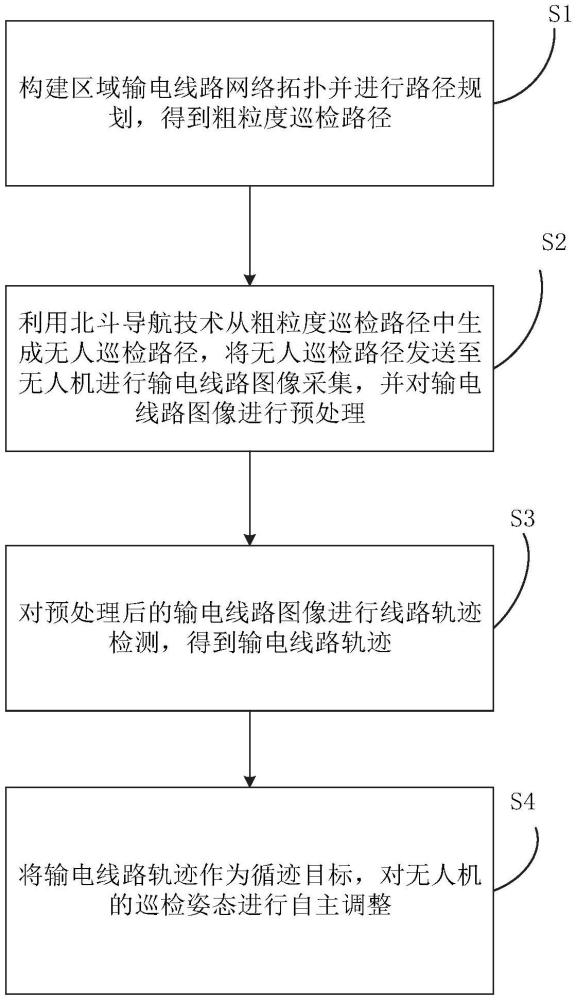
3、s1:构建区域输电线路网络拓扑并进行路径规划,得到粗粒度巡检路径,其中连通路径分析为所述路径规划的主要实施方法;
4、s2:利用北斗导航技术从粗粒度巡检路径中生成无人巡检路径,将无人巡检路径发送至无人机进行输电线路图像采集,并对输电线路图像进行预处理,其中分层滤波为所述预处理的主要实施方法;
5、s3:对预处理后的输电线路图像进行线路轨迹检测,得到输电线路轨迹,其中结构化路径检测为所述线路轨迹检测的主要实施方法;
6、s4:将输电线路轨迹作为循迹目标,对无人机的巡检姿态进行自主调整。
7、作为本发明的进一步改进方法:
8、可选地,所述s1步骤中构建区域输电线路网络拓扑,包括:
9、构建区域输电线路网络拓扑,区域输电线路网络拓扑由节点以及节点之间的输电通路构成,其中区域输电线路网络拓扑中的节点为输电线路开关,区域输电线路网络拓扑的节点集合为:
10、e={en|n∈[1,n]}
11、其中:
12、e表示区域输电线路网络拓扑的节点集合,en表示区域输电线路网络拓扑中的第n个节点,即区域输电线路中的第n个输电线路开关,n表示区域输电线路网络拓扑中的节点数目;
13、对区域输电线路网络拓扑中节点的状态进行形式化描述,其中节点en的状态为sn,sn=1表示节点en处于输电开启状态,sn=0则表示节点en处于输电关闭状态;
14、区域输电线路网络拓扑中节点en与节点em之间的输电通路为:
15、l(en,em)={lu(en,em)|u∈[1,un.m]}
16、lu(en,em)=(en,e(n,m,1),e(n,m,2),...,em)
17、其中:
18、l(en,em)表示区域输电线路网络拓扑中节点en与节点em之间的输电通路,lu(en,em)表示区域输电线路网络拓扑中节点en与节点em之间的第u条输电路径,其中输电路径lu(en,em)表示以节点en为起点,以节点em为终点的输电线路,输电线路中出现的节点互不相同;输电线路由输电线路开关以及连接输电线路开关的输电导线构成;
19、un,m表示输电通路l(en,em)中的输电路径总数;
20、m∈[1,n];
21、(en,e(n,m,1),e(n,m,2),...,em)表示输电路径lu(en,em)中的节点序列,e(n,m,1)表示输电路径lu(en,em)中的第1个节点,e(n,m,1)∈e;在本发明实施例中,节点序列(en,e(n,m,1),e(n,m,2),...,em)中的节点互不相同;
22、根据区域输电线路网络拓扑进行路径规划,得到粗粒度巡检路径。
23、可选地,所述根据区域输电线路网络拓扑进行路径规划,包括:
24、根据区域输电线路网络拓扑进行路径规划,其中连通路径分析为所述路径规划的主要实施方法,路径规划流程为:
25、生成区域输电线路网络拓扑中所有节点的邻接矩阵:
26、s=(s(n,m))n×n
27、
28、su(en,em)=sn∧s(n,m,1)∧s(n,m,2)∧...∧sm
29、其中:
30、s表示区域输电线路网络拓扑中所有节点的邻接矩阵,s为n行n列的上三角矩阵形式;
31、s(n,m)表示区域输电线路网络拓扑中节点en与节点em之间的邻接值,s(n,m)=1表示节点en与节点em之间存在正在输电的输电路径,s(n,m)=0表示节点en与节点em之间不存在正在输电的输电路径;
32、su(en,em)=1表示输电路径lu(en,em)正在输电,su(en,em)=0表示输电路径lu(en,em)未在输电;
33、v表示逻辑加运算;
34、∧表示逻辑乘运算;
35、s(n,m,1)表示节点e(n,m,1)的状态;
36、若两个节点之间正在输电的输电路径,则该两个节点为邻接点,采用深度优先遍历的方式对邻接矩阵进行遍历,得到k组粗粒度巡检路径,其中每组粗粒度巡检路径由区域输电线路网络拓扑中的节点组成,其中第k组粗粒度巡检路径为:
37、
38、其中:
39、gk表示第k组粗粒度巡检路径,k∈[1,k];
40、表示粗粒度巡检路径gk中的节点序列,表示粗粒度巡检路径gk中的第i个节点,numk表示粗粒度巡检路径gk中的节点数目,i∈[1,numk]。
41、可选地,所述s2步骤中利用北斗导航技术从粗粒度巡检路径中生成无人巡检路径,包括:
42、利用北斗导航技术从粗粒度巡检路径中生成无人巡检路径,其中无人巡检路径的生成流程为:
43、利用北斗导航技术定位粗粒度巡检路径中节点的位置,得到粗粒度巡检路径对应的巡检位置序列,其中粗粒度巡检路径gk对应的巡检位置序列为:
44、
45、其中:
46、lock表示粗粒度巡检路径gk对应的巡检位置序列;
47、表示利用北斗导航技术定位得到的节点的位置;
48、对于巡检位置序列中的任意两个相邻位置,选取相邻位置所对应节点之间正在输电的输电路径,并将该输电路径映射到地图中,得到巡检位置序列中任意两个相邻位置之间的巡检路径,构成粗粒度巡检路径对应的无人巡检路径,其中粗粒度巡检路径gk对应的无人巡检路径为:
49、
50、其中:
51、表示位置之间的巡检路径;
52、roadk表示粗粒度巡检路径gk对应的无人巡检路径roadk。
53、可选地,所述将无人巡检路径发送至无人机进行输电线路图像采集,并对输电线路图像进行预处理,包括:
54、将无人巡检路径发送至无人机,无人机按照无人巡检路径进行飞行,并在飞行过程中拍摄输电线路图像i,对输电线路图像i进行预处理,其中分层滤波为所述预处理的主要实施方法,输电线路图像i的预处理流程为:
55、s21:将输电线路图像i由rgb颜色空间转换至hsv颜色空间,得到输电线路图像i中任意像素在hsv颜色空间的颜色值,其中输电线路图像i中第x行第y列像素i(x,y)在hsv颜色空间的颜色值依次为:ih(x,y),is(x,y),iv(x,y),x∈[1,x],y∈[1,y],x表示输电线路图像的像素行数,y表示输电线路图像的像素列数;
56、s22:对输电线路图像i中的像素进行分层滤波,其中像素i(x,y)的分层滤波公式为:
57、
58、其中:
59、i1(x,y,σ)表示像素i(x,y)在分层尺度σ的滤波结果,σ∈[1,m],m表示所设置的最大分层尺度;
60、exp(·)表示以自然常数为底的指数函数;
61、s23:对输电线路图像i中的像素进行自适应伽马校正,其中像素i(x,y)的自适应伽马校正结果为:
62、
63、其中:
64、i2(x,y)表示像素i(x,y)的自适应伽马校正结果;
65、μs表示输电线路图像i中所有像素在颜色通道s的均值;
66、表示像素i(x,y)的自适应伽马系数;
67、s24:结合像素的分层滤波结果以及自适应伽马校正结果,计算得到像素的映射融合值,其中像素i(x,y)的映射融合值为:
68、
69、其中:
70、i3(x,y)表示像素i(x,y)的映射融合值;
71、α表示映射系数;
72、s25:构成预处理后的输电线路图像i*=(i3(x,y))x×y,i3(x,y)表示输电线路图像i*中第x行第y列像素i*(x,y)的像素值。
73、可选地,所述s3步骤中对预处理后的输电线路图像进行线路轨迹检测,包括:
74、对预处理后的输电线路图像i*进行线路轨迹检测,得到输电线路轨迹,其中预处理后输电线路图像i*的线路轨迹检测流程为:
75、s31:计算得到输电线路图像i*中任意像素的拉普拉斯算子二阶导数,其中像素i*(x,y)的拉普拉斯算子二阶导数为:
76、
77、其中:
78、表示像素i*(x,y)的拉普拉斯算子二阶导数;
79、s32:对输电线路图像i*中任意像素的像素值进行锐化处理,其中像素值i3(x,y)的锐化处理公式为:
80、
81、其中:
82、i′3(x,y)表示像素值i3(x,y)的锐化处理结果;
83、s33:生成输电线路图像i*中任意像素的自相关矩阵,其中像素i*(x,y)的自相关矩阵为:
84、
85、c1(x,y)=i′3(x+1,y)-i′3(x-1,y)
86、c2(x,y)=i′3(x,y+1)-i′3(x,y-1)
87、其中:
88、c(x,y)表示像素i*(x,y)的自相关矩阵;
89、c1(x,y)表示像素i*(x,y)的水平方向梯度;
90、c2(x,y)表示像素i*(x,y)的竖直方向梯度;
91、s34:计算得到自相关矩阵的行列式值以及矩阵的迹,其中自相关矩阵c(x,y)的行列式值为hc(x,y),自相关矩阵c(x,y)的迹为trc(x,y);
92、s35:计算得到输电线路图像i*中任意像素的输电线路评价值,其中像素i*(x,y)的输电线路评价值为:
93、
94、其中:
95、value(x,y)表示像素i*(x,y)的输电线路评价值;
96、选取输电线路评价值高于预设阈值的像素作为输电线路轨迹点,并将像素坐标转换到世界坐标系下,得到输电线路轨迹点位置序列,并将输电线路轨迹点位置序列作为输电线路轨迹。
97、可选地,所述s4步骤中将输电线路轨迹作为循迹目标,对无人机的巡检姿态进行自主调整,包括:
98、将输电线路轨迹作为循迹目标,对无人机的巡检姿态进行自主调整,并重新拍摄输电线路图像,其中无人机的巡检姿态自主调整流程为:
99、从输电线路轨迹中选取距离无人机当前位置(p0,q0,z0)最近的轨迹点位置(p,q,z);
100、计算得到无人机巡检姿态调整结果其中满足下式:
101、(p0,q0,z0)q=(p,q, z)
102、其中:
103、q为姿态坐标转换关系矩阵,q的矩阵表示形式为:
104、
105、为无人机的翻滚角、俯仰角、以及偏航角。
106、为了解决上述问题,本发明提供一种电子设备,所述电子设备包括:
107、存储器,存储至少一个指令;
108、通信接口,实现电子设备通信;及
109、处理器,执行所述存储器中存储的指令以实现上述所述的基于北斗技术的输电线路无人自主巡检方法。
110、为了解决上述问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一个指令,所述至少一个指令被电子设备中的处理器执行以实现上述所述的基于北斗技术的输电线路无人自主巡检方法。
111、相对于现有技术,本发明提出一种基于北斗技术的输电线路无人自主巡检方法,该技术具有以下优势:
112、首先,本方案提出一种无人巡检路径生成方式,生成区域输电线路网络拓扑中所有节点的邻接矩阵:
113、s=(s(n,m))n×n
114、
115、su(en,em)=sn∧s(n,m,1)∧s(n,m,2)∧...∧sm
116、其中:s表示区域输电线路网络拓扑中所有节点的邻接矩阵,s为n行n列的上三角矩阵形式;s(n,m)表示区域输电线路网络拓扑中节点en与节点em之间的邻接值,s(n,m)=1表示节点en与节点em之间存在正在输电的输电路径,s(n,m)=0表示节点en与节点em之间不存在正在输电的输电路径;su(en,em)=1表示输电路径lu(en,em)正在输电,su(en,em)=0表示输电路径lu(en,em)未在输电;v表示逻辑加运算;∧表示逻辑乘运算;s(n,m,1)表示节点e(n,m,1)的状态;若两个节点之间正在输电的输电路径,则该两个节点为邻接点,采用深度优先遍历的方式对邻接矩阵进行遍历,得到k组粗粒度巡检路径,其中每组粗粒度巡检路径由区域输电线路网络拓扑中的节点组成,其中第k组粗粒度巡检路径为:
117、
118、其中:gk表示第k组粗粒度巡检路径,k∈[1,k];表示粗粒度巡检路径gk中的节点序列,表示粗粒度巡检路径gk中的第i个节点,numk表示粗粒度巡检路径gk中的节点数目,i∈[1,numk]。利用北斗导航技术定位粗粒度巡检路径中节点的位置,得到粗粒度巡检路径对应的巡检位置序列,其中粗粒度巡检路径gk对应的巡检位置序列为:
119、
120、其中:lock表示粗粒度巡检路径gk对应的巡检位置序列;表示利用北斗导航技术定位得到的节点的位置;对于巡检位置序列中的任意两个相邻位置,选取相邻位置所对应节点之间正在输电的输电路径,并将该输电路径映射到地图中,得到巡检位置序列中任意两个相邻位置之间的巡检路径,构成粗粒度巡检路径对应的无人巡检路径,其中粗粒度巡检路径gk对应的无人巡检路径为:
121、
122、其中:表示位置之间的巡检路径;roadk表示粗粒度巡检路径gk对应的无人巡检路径roadk。本方案基于输电线路中开关的逻辑关系构建区域输电线路网络拓扑,并将不同节点之间的输电路径构成输电通路,将节点之间的输电路径转换为邻接矩阵,根据不同节点之间的邻接值表征节点之间是否存在输电路径,并对邻接矩阵进行遍历,得到由不同节点构成的粗粒度巡检路径,利用北斗导航技术将粗粒度巡检路径映射到地图上,得到无人巡检路径,实现基于输电线路中节点连通关系的无人巡检路径生成。
123、同时,本方案提出一种输电线路图像预处理以及线路轨迹提取方式,对输电线路图像i中的像素进行分层滤波,其中像素i(x,y)的分层滤波公式为:
124、
125、其中:i1(x,y,σ)表示像素i(x,y)在分层尺度σ的滤波结果,σ∈[1,m],m表示所设置的最大分层尺度;exp(·)表示以自然常数为底的指数函数;对输电线路图像i中的像素进行自适应伽马校正,其中像素i(x,y)的自适应伽马校正结果为:
126、
127、其中:i2(x,y)表示像素i(x,y)的自适应伽马校正结果;μs表示输电线路图像i中所有像素在颜色通道s的均值;表示像素i(x,y)的自适应伽马系数;结合像素的分层滤波结果以及自适应伽马校正结果,计算得到像素的映射融合值,其中像素i(x,y)的映射融合值为:
128、
129、其中:i3(x,y)表示像素i(x,y)的映射融合值;α表示映射系数;构成预处理后的输电线路图像i*=(i3(x,y))x×y,i3(x,y)表示输电线路图像,*中第x行第y列像素i*(x,y)的像素值。
130、相对于现有技术,本发明具有以下有益效果:
131、无人机在巡检过程中实时采集输电线路图像,并基于分层尺度以及不同颜色空间的颜色值,对输电线路图像进行分层滤波以及自适应伽马校正处理,过滤所采集图像中的噪声信息并增强输电线路图像中不同像素之间的对比图,对预处理后的输电线路图像进行锐化处理,提高图像清晰度,并基于像素梯度结构的自相关矩阵选取表征线路轨迹的像素点作为输电线路轨迹,将输电线路轨迹作为循迹目标,在无人机巡检过程中对巡检姿态进行实时自主调整,提高无人机巡检轨迹与输电线路轨迹的重合度。
- 还没有人留言评论。精彩留言会获得点赞!