适用于圆柱体对接设备的六自由度姿态测量和调整方法与流程
本发明涉及舱段测量调整,特别是涉及一种适用于圆柱体对接设备的六自由度姿态测量和调整方法。
背景技术:
1、总装技术对舱段的总体性能和可靠性有直接的影响,对飞行试验的成败有重要的作用。舱段位姿测调是实现智能生产的关键一环。因此,设计一种适用于圆柱体对接设备的六自由度姿态测量和调整方法是十分有必要的。
技术实现思路
1、为了克服现有技术的不足,本发明的目的是提供一种适用于圆柱体对接设备的六自由度姿态测量和调整方法。
2、为实现上述目的,本发明提供了如下方案:
3、本发明提供了一种适用于圆柱体对接设备的六自由度姿态测量和调整方法,应用于圆柱体对接设备,该设备包括检测机构及调整机构,所述检测机构上设置第一激光传感器、第二激光传感器及第三激光传感器,所述检测机构用于检测圆柱体的姿态,所述调整机构包括x向电机、z向电机、偏航电机、y向前支撑电机、y向后支撑电机及滚转电机,所述调整机构用于调整对接圆柱体;
4、该方法包括:
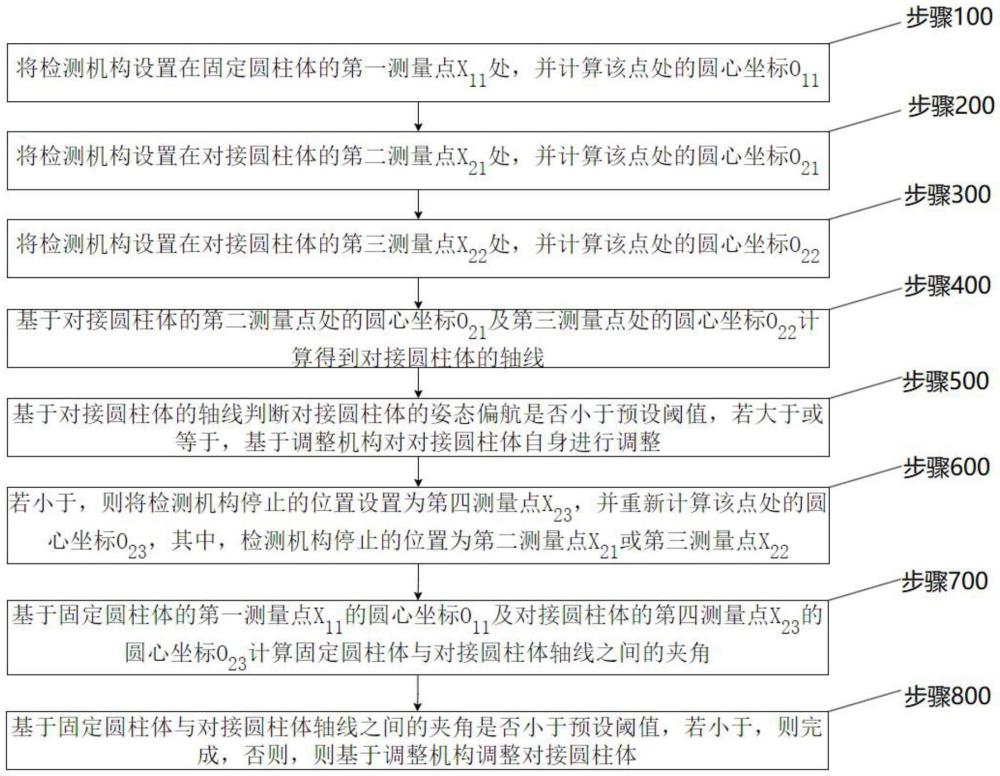
5、将检测机构设置在固定圆柱体的第一测量点x11处,并计算该点处的圆心坐标o11;
6、将检测机构设置在对接圆柱体的第二测量点x21处,并计算该点处的圆心坐标o21;
7、将检测机构设置在对接圆柱体的第三测量点x22处,并计算该点处的圆心坐标o22;
8、基于对接圆柱体的第二测量点处的圆心坐标o21及第三测量点处的圆心坐标o22计算得到对接圆柱体的轴线;
9、基于对接圆柱体的轴线判断对接圆柱体的姿态偏航是否小于预设阈值,若大于或等于,基于调整机构对对接圆柱体自身进行调整;
10、若小于,则将检测机构停止的位置设置为第四测量点x23,并重新计算该点处的圆心坐标o23,其中,检测机构停止的位置为第二测量点x21或第三测量点x22;
11、基于固定圆柱体的第一测量点x11的圆心坐标o11及对接圆柱体的第四测量点x23的圆心坐标o23计算固定圆柱体与对接圆柱体轴线之间的夹角;
12、基于固定圆柱体与对接圆柱体轴线之间的夹角是否小于预设阈值,若小于,则完成,否则,则基于调整机构调整对接圆柱体。
13、优选地,计算第一测量点x11处的圆心坐标o11(zo11,yo11)、计算第二测量点x21处的圆心坐标o21(zo21,yo21)以及第三测量点x22处的圆心坐标o22(zo22,yo22)的方式相同,第一测量点x11设置在固定圆柱体上,第二测量点x21设置在对接圆柱体靠近固定圆柱体的一侧,第三测量点x22设置在对接圆柱体远离固定圆柱体的一侧,其中,计算第一测量点x11处的圆心坐标o11的方式具体为:
14、计算第一激光传感器、第二激光传感器及第三激光传感器与固定圆柱体分布角度为θ1、θ2、θ3,计算第一激光传感器、第二激光传感器及第三激光传感器与固定圆柱体的三处高度变化量为δh1、δh2、δh3,将分布角度与高度变化量与固定圆柱体的半径r组成第一测量点x11处的截面位置信息,为:[(r+δh1,θ1),(r+δh2,θ2),(r+δh3,θ3)],将其转换为直角坐标,为:a(z1,y1),b(z2,y2),c(z3,y3),通过最小二乘法计算出第一测量点x11处的圆心坐标o11(zo11,yo11)为:
15、a=[ztz]-1zty (1)
16、式中,
17、优选地,基于对接圆柱体的第二测量点处的圆心坐标o21及第三测量点处的圆心坐标o22计算得到对接圆柱体的轴线,具体为:
18、基于对接圆柱体的第二测量点处的圆心坐标o21及第三测量点处的圆心坐标o22构建投影点o2′1,o2′2,o2″2,其中,面o2′1,o2′2,o2″2与平面xoz平行,o2′1为(xo22,yo21,zo21),o2′2为(xo22,yo21,zo22),o2″2为(xo22,yo22,zo21),根据航向角的定义,∠o22o21o′22为俯仰角,用α21表示,∠o′22o21o′2′2为偏航角,用β21表示,为:
19、
20、优选地,基于对接圆柱体的轴线判断对接圆柱体的姿态偏航是否小于预设阈值,具体为:
21、判断对接圆柱体的02段的俯仰角α21及偏航角β21是否小于预设阈值eα21,eβ21为:
22、
23、优选地,若大于或等于,基于调整机构对对接圆柱体自身进行调整,具体为:
24、计算对接圆柱体自身的俯仰调整量和偏航调整量,其中,偏航调整量为:将偏航角作为偏航电机的调整量δβ21,为:
25、δβ21=β21 (6)
26、俯仰调整量为:获取对接圆柱体上与y向前支撑电机、y向后支撑电机对应的支点l1及支点l2,设支点l1不动,计算支点l2的y向调整量δyl2为:
27、δyl2=y-y=(xl2-xl1)tanα (7)
28、式中,支点l1的坐标为(xl1,yl1,zl1),支点l2的坐标为(xl2,yl2,zl2),ɑ为支点l1与支点l2连成的线与x轴的夹角;
29、基于偏航电机以及y向前支撑电机或y向后支撑电机,根据偏航电机的调整量δβ21及y向调整量δyl2对对接圆柱体自身进行调整;
30、调整完毕后,重新检测对接圆柱体自身姿态偏航是否小于预设阈值。
31、优选地,基于固定圆柱体的第一测量点x11的圆心坐标o11及对接圆柱体的第四测量点x23的圆心坐标o23计算固定圆柱体与对接圆柱体轴线之间的夹角,具体为:
32、基于固定圆柱体的第一测量点x11的圆心坐标o11(zo11,yo11)及对接圆柱体的第四测量点x23的圆心坐标o23(zo23,yo23)计算固定圆柱体与对接圆柱体轴线之间的俯仰角α12及偏航角β13为:
33、
34、优选地,基于固定圆柱体与对接圆柱体轴线之间的夹角是否小于预设阈值,若小于,则完成,否则,则基于调整机构调整对接圆柱体,具体为:
35、判断俯仰角α12及偏航角β13是否小于预设阈值eα13,eβ13,若小于,则完成调整,若不小于,则计算固定圆柱体与对接圆柱体之间的俯仰调整量和偏航调整量;
36、其中,偏航调整量由对接圆柱体的z向电机的位置决定,计算偏航调整量为δz13:
37、δz13=(x23-x11)tanβ13 (9)
38、俯仰调整量由对接圆柱体的y向前支撑电机、y向后支撑电机决定,计算俯仰调整量δy13为:
39、δy13=(x23-x11)tanα13 (10)
40、基于偏航调整量δz13、俯仰调整量δy13通过z向电机、y向前支撑电机、y向后支撑电机进行调整;
41、调整完毕后,重新检测是否满足预设阈值,若不满足,则重新调整,直至满足预设阈值后,进行对接。
42、根据本发明提供的具体实施例,本发明公开了以下技术效果:
43、本发明提供了一种适用于圆柱体对接设备的六自由度姿态测量和调整方法,该方法包括将检测机构设置在固定圆柱体的第一测量点x11处,并计算该点处的圆心坐标o11,将检测机构设置在对接圆柱体的第二测量点x21处,并计算该点处的圆心坐标o21,将检测机构设置在对接圆柱体的第三测量点x22处,并计算该点处的圆心坐标o22,基于对接圆柱体的第二测量点处的圆心坐标o21及第三测量点处的圆心坐标o22计算得到对接圆柱体的轴线,基于对接圆柱体的轴线判断对接圆柱体的姿态偏航是否小于预设阈值,若大于或等于,基于调整机构对对接圆柱体自身进行调整,若小于,则将检测机构设置在对接圆柱体的第四测量点x23处,并重新计算该点处的圆心坐标o23,基于固定圆柱体的第一测量点x11的圆心坐标o11及对接圆柱体的第四测量点x23的圆心坐标o23计算固定圆柱体与对接圆柱体轴线之间的夹角,基于固定圆柱体与对接圆柱体轴线之间的夹角是否小于预设阈值,若小于,则完成,否则,则基于调整机构调整对接圆柱体。本发明能够快速完成产品两段部件的自动测量和装配工作,节约人力,提高了整体生产效率,便于使用。
- 还没有人留言评论。精彩留言会获得点赞!