一种航天器轨道交会仿真控制方法、装置、设备及存储介质与流程
本发明涉及航天器仿真控制,尤其涉及一种航天器轨道交会仿真控制方法、装置、设备及存储介质。
背景技术:
1、传统的航天器交会模型不仅基于精确的数学模型和工程经验进行设计和优化,同时依赖于精确的物理参数和环境参数。
2、目前,在仿真场景应用中,传统的航天器交会控制算法模型由于其所需要的严格输入,仿真软件和仿真流程往往很难满足算法运行条件,同时基于精确的数学模型和工程经验的航天器交会算法,导致很多仿真系统不仅难于构建,也同样难以操作,使得无法适应仿真系统使用,可靠性低,且操作计算复杂度较高,进而导致了航天轨道交会仿真控制的准确性低,使得仿真控制任务的执行效率低。
技术实现思路
1、本发明提供了一种航天器轨道交会仿真控制方法、装置、设备及存储介质,以解决现有技术中的航天器轨道交会仿真控制无法适应仿真系统使用,可靠性低,且操作计算复杂度较高,进而导致了航天轨道交会仿真控制的准确性低,使得仿真控制任务的执行效率低的技术问题。
2、为了解决上述技术问题,本发明实施例提供了一种航天器轨道交会仿真控制方法,包括:
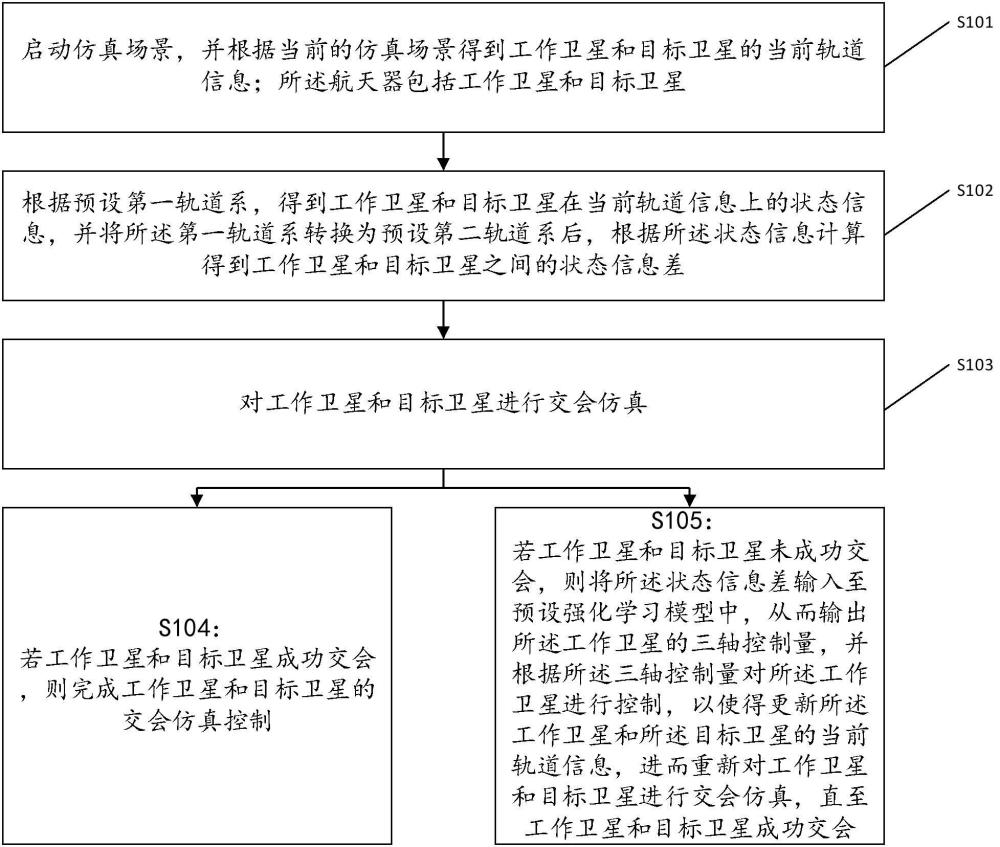
3、启动仿真场景,并根据当前的仿真场景得到工作卫星和目标卫星的当前轨道信息;所述航天器包括工作卫星和目标卫星;
4、根据预设第一轨道系,得到工作卫星和目标卫星在当前轨道信息上的状态信息,并将所述第一轨道系转换为预设第二轨道系后,根据所述状态信息计算得到工作卫星和目标卫星之间的状态信息差;
5、对工作卫星和目标卫星进行交会仿真;
6、若工作卫星和目标卫星成功交会,则完成工作卫星和目标卫星的交会仿真控制;
7、若工作卫星和目标卫星未成功交会,则将所述状态信息差输入至预设强化学习模型中,从而输出所述工作卫星的三轴控制量,并根据所述三轴控制量对所述工作卫星进行控制,以使得更新所述工作卫星和所述目标卫星的当前轨道信息,进而重新对工作卫星和目标卫星进行交会仿真,直至工作卫星和目标卫星成功交会。
8、作为优选方案,所述启动仿真场景,并根据当前的仿真场景得到当前轨道信息,具体包括:
9、初始化场景参数;其中,所述场景参数包括仿真时长、仿真步长、控制周期、目标卫星的初始轨道信息、目标卫星的速度增量以及工作卫星的初始轨道信息;
10、根据所述场景参数启动包括目标卫星和工作卫星进行交会的仿真场景;
11、在启动所述仿真场景之后,获取到目标卫星和工作卫星的当前轨道信息。
12、作为优选方案,所述根据预设第一轨道系,得到工作卫星和目标卫星在当前轨道信息上的状态信息,并将所述第一轨道系转换为预设第二轨道系后,根据所述状态信息计算得到工作卫星和目标卫星之间的状态信息差,具体包括:
13、根据预设第一轨道系,通过数值法计算得到工作卫星和目标卫星在当前轨道信息上的状态信息;其中,所述状态信息包括速度和位置;
14、当到达所述控制周期时,将所述第一轨道系下的所述状态信息转换为预设第二轨道系下的数据,并根据预设第二轨道系下的数据,计算得到工作卫星和目标卫星之间的状态信息差;其中,所述状态信息差包括速度差和位置差。
15、作为优选方案,在对工作卫星和目标卫星进行交会仿真之前,还包括:
16、判断当前的仿真场景的仿真时长是否已经耗尽;
17、若是,则更新场景参数,并根据更新后的场景参数,启动新的仿真场景;
18、若否,则直接对工作卫星和目标卫星进行交会仿真。
19、作为优选方案,在判断当前的仿真场景的仿真时长是否已经耗尽之后,还包括:
20、判断当前的仿真场景下工作卫星所消耗的燃料是否达到预设最大值;
21、若是,则更新场景参数,并根据更新后的场景参数,启动新的仿真场景;
22、若否,则直接对工作卫星和目标卫星进行交会仿真。
23、作为优选方案,所述预设强化学习模型的构建方法,包括:
24、设置初始强化学习模型的网络参数,并初始化经验回放池;其中,所述初始强化学习模型包括价值网络和策略网络;
25、对于每一环境步,根据环境反馈的当前状态,从所述策略网络中采样动作,从而根据所述动作对环境的状态进行更新,得到更新状态,并根据预设奖励函数计算当前的即时奖励,以使得将每一个环境步对应的所述当前状态、动作、即时奖励和更新状态存储至经验回放池之中;
26、从所述经验回放池中随机采样若干样本,并根据所采样的样本,对所述网络参数进行更新,从而迭代更新所述价值网络和策略网络;其中,每一样本均包括该环境步对应的所述当前状态、动作、即时奖励和更新状态;
27、直至所述策略网络收敛后,将当前的策略网络和价值网络作为最终的预设强化学习模型。
28、作为优选方案,所述奖励函数的表达式为:
29、
30、
31、
32、
33、
34、
35、其中,为奖励函数的总表达式,为距离奖励,为工作卫星和目标卫星的位置差,为速度奖励,为卫星轨道奖励,为惩罚函数,为卫星轨道,为,为卫星速度。
36、相应地,本发明还提供一种航天器轨道交会仿真控制装置,包括:启动模块、计算模块、仿真模块、第一判断模块和第二判断模块;
37、所述启动模块,用于启动仿真场景,并根据当前的仿真场景得到工作卫星和目标卫星的当前轨道信息;所述航天器包括工作卫星和目标卫星;
38、所述计算模块,用于根据预设第一轨道系,得到工作卫星和目标卫星在当前轨道信息上的状态信息,并将所述第一轨道系转换为预设第二轨道系后,根据所述状态信息计算得到工作卫星和目标卫星之间的状态信息差;
39、所述仿真模块,用于对工作卫星和目标卫星进行交会仿真;
40、所述第一判断模块,用于若工作卫星和目标卫星成功交会,则完成工作卫星和目标卫星的交会仿真控制;
41、所述第二判断模块,用于若工作卫星和目标卫星未成功交会,则将所述状态信息差输入至预设强化学习模型中,从而输出所述工作卫星的三轴控制量,并根据所述三轴控制量对所述工作卫星进行控制,以使得更新所述工作卫星和所述目标卫星的当前轨道信息,进而重新对工作卫星和目标卫星进行交会仿真,直至工作卫星和目标卫星成功交会。
42、相应地,本发明还提供一种终端设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现如上任意一项所述的航天器轨道交会仿真控制方法。
43、相应地,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如上任意一项所述的航天器轨道交会仿真控制方法。
44、相比于现有技术,本发明实施例具有如下有益效果:
45、本发明的技术方案通过启动仿真场景,并根据当前的仿真场景来得到工作卫星和目标卫星的当前轨道信息,从而能够计算得到对应的状态信息和状态信息差,从而能够有效地描述航天器的轨道交会仿真控制的复杂动态特性和环境变化,进而对工作卫星和目标卫星进行交会仿真,并在工作卫星和目标卫星未成功交会时,通过预设强化学习模型来计算工作卫星的三轴控制量,从而更新轨道信息后再重新对工作卫星和目标卫星进行交会仿真,直至工作卫星和目标卫星成功交会,通过利用预设强化学习模型,结合卫星交会的动态特性和环境变化,通过与环境的交互学习,自主地优化航天器交会的轨道信息和控制策略,以实现自适应和智能化的卫星轨道交会仿真控制计算任务,提高了仿真可靠性,且降低了操作计算的复杂度,进而确保了航天轨道交会仿真控制的准确性,提高了利用预设强化学习模型对航天器轨道交会仿真控制任务的执行效率。
- 还没有人留言评论。精彩留言会获得点赞!