一种基于多模态的智能机器人协作调度系统及方法与流程
本发明属于机器人协作调度,具体涉及一种基于多模态的智能机器人协作调度系统及方法。
背景技术:
1、制造业既影响着国家经济的走向,也与群众的日常生活密不可分,只有国家的制造业以良好的趋势发展,其他行业才能稳定地运行,随着工业互联网平台体系快速普及到40多个国民经济大类中,产业规模也突破到万亿元级别。制造企业利用数字化、网络化、智能化建设智慧工厂的步伐正在快速迈进,离散制造企业利用新技术和新理论完成工厂车间的迭代更新,提高工厂车间的制造效率,减少生产成本是企业生存和发展的必经之路。
2、在传统的工厂产线生产过程中,生产物料的转运工作往往是由操作员利用手推车、叉车等工具将生产物料自库房推送至生产现场,由于库房需要专门的工作人员管理生产物料的出库入库,这会导致生产物料运输效率降低,另一方面,由于作业现场的不同,生产物料的配送变化多样,操作员在配送过程中容易出错,进一步影响了产线生产效率,随着工厂智慧化的发展,越来越多的智能机器人进入工厂车间,代替人力劳动,但是目前的智慧工厂普遍存在机器人调度不及时,导致产线物料异常,降低生产效率。
技术实现思路
1、为解决现有技术中存在的上述问题,本发明提供了一种基于多模态的智能机器人协作调度系统及方法,通过获取产线运行数据和机器人信息,根据产线运行数据构建生产进度的概率分布函数,根据概率分布函数对生产进度进行预测得到物料短缺预测时间并生成物料运输任务信息,根据物料短缺预测时间,并通过锁定生产设备坐标和物料坐标对物料运输任务信息进行排序得到任务序列,根据任务序列结合机器人协作度对机器人进行任务分配得到任务分配信息,机器人根据任务分配信息进行作业,实现了生产物料的事前调度,提高了生产效率,提高了物料运输效率,进一步保障了产线运行的稳定性和流畅性。
2、本发明的目的可以通过以下技术方案实现:
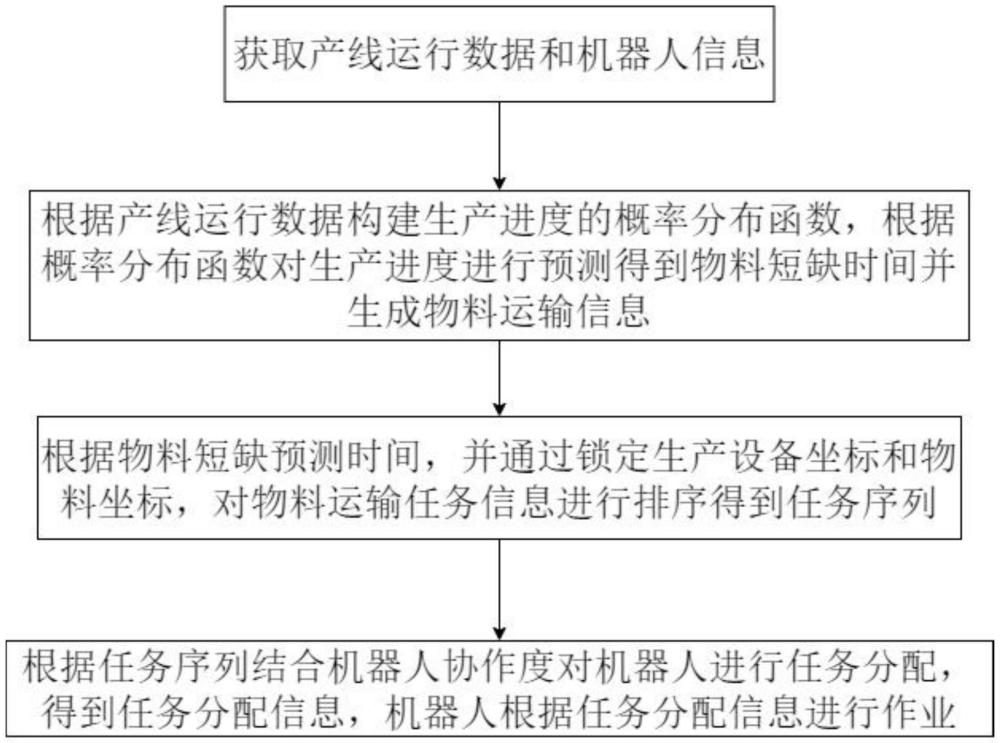
3、一种基于多模态的智能机器人协作调度方法,具体包括以下步骤:
4、s1:获取产线运行数据和机器人信息,所述机器人信息包括待执行任务信息;
5、s2:根据所述产线运行数据构建生产进度的概率分布函数,根据所述概率分布函数对生产进度进行预测得到物料短缺预测时间,并生成物料运输任务信息;
6、s3:根据所述物料短缺预测时间,并通过锁定生产设备坐标和所述物料坐标,对物料运输任务信息进行排序得到任务序列;
7、s4:根据任务序列结合机器人协作度对机器人进行任务分配,得到任务分配信息,机器人根据任务分配信息进行作业。
8、优选地,所述步骤s2具体包括以下步骤:
9、s201:所述产线运行数据包括设备生产效率、物料需求概率和物料剩余数量;
10、s202:根据所述物料需求概率构建概率分布函数,所述概率分布函数表示为:其中,s(v,t)表示生产设备v在预设时间段t内的所述概率分布函数,λt表示预设时间段t内物料需求量泊松分布参数,pt表示所述物料需求概率,k表示预设参数,根据所述概率分布函数和所述产线运行数据,通过公式计算得到所述物料短缺预测时间,其中,rt表示物料短缺预测时间,s(c,t)表示所述概率分布函数,wi表示所述物料剩余数量,q表示所述设备生产效率;
11、s203:当所述物料短缺预测时间小于预设阈值时,生成所述物料运输任务信息,所述物料运输任务信息包括生产设备编号和物料编号。
12、优选地,所述步骤s3具体包括以下步骤:
13、s301:根据所述物料运输信息得到生产设备坐标和物料坐标;
14、s302:根据所述生产设备坐标和所述物料坐标,结合所述物料短缺预测时间,通过公式计算得到任务优先因子,其中,as(psj,pmj)表示任务j的起始位置坐标和目标位置坐标之间的距离,psj表示所述起始位置坐标,pmj表示所述目标位置坐标,θj表示任务j的所述任务优先因子,t1表示所述物料短缺预测时间,t2表示当前时间,(xs,ys)表示所述生产设备坐标,(xm,ym)表示所述物料坐标,按照所述任务优先因子从大到小的顺序,依次对物料运输任务进行排序,得到所述任务序列。
15、优选地,所述步骤s4具体包括以下步骤:
16、s401:所述待执行任务信息包括待执行任务总数,根据所述待执行任务信息,通过公式计算得到待执行任务代价和接受任务代价,其中,gi表示机器人i的所述待执行任务代价,hi表示机器人i的所述接受任务代价,o1表示所述待执行任务总数,o2表示任务序列中的任务总数,表示第j个任务的所述任务优先因子,表示第k个任务的所述任务优先因子,根据所述待执行任务代价得到第一模态集合,根据所述接受任务代价得到第二模态集合;
17、s402:根据所述第一模态集合和所述第二模态集合,通过极差标准化处理得到待执行任务代价指标和接受任务代价指标,根据所述待执行任务代价指标和所述接受任务代价指标得到机器人协作度;
18、s403:当所述机器人协作度小于预设阈值时,将对应的机器人标记为不可调度,当所述机器人协作度大于预设阈值时,将对应的机器人标记为可调度,并根据所述机器人协作度按照从大到小顺序,对可调度的机器人进行排序,得到可调度机器人序列,根据所述任务序列和所述可调度机器人序列进行任务分配得到所述任务分配信息,机器人根据所述任务分配信息进行作业。
19、优选地,所述极差标准化处理过程如下:
20、根据所述待执行任务代价和所述接受任务代价,通过公式处理得到待执行任务代价指标和接受任务代价指标,其中,表示所述待执行任务代价指标,表示所述接受任务代价指标,gi表示所述待执行任务代价,gmin表示待执行任务代价的最小值,gmax表示待执行任务代价的最大值,hi表示所述接受任务代价,hmin表示接受任务代价最小值,hmax表示接受任务代价最大值;
21、所述机器人协作度的分析计算过程如下:
22、根据所述待执行任务代价指标和所述接受任务代价指标,通过公式计算得到所述机器人协作度,其中,ai表示机器人i的所述机器人协作度,α表示权重因子,表示机器人i的所述待执行任务代价指标,表示机器人i的所述接受任务代价指标,表示机器人i的任务均衡因子。
23、一种基于多模态的智能机器人协作调度系统,包括:
24、信息采集模块,用于获取产线运行数据和机器人信息,所述机器人信息包括待执行任务信息;
25、进度预测模块,用于根据所述产线运行数据构建生产进度的概率分布函数,根据所述概率分布函数对生产进度进行预测,得到物料短缺预测时间并生成物料运输任务信息;
26、任务分配模块,用于根据所述物料短缺预测时间,并通过锁定生产设备坐标和所述物料坐标,对物料运输任务信息进行排序得到任务序列,根据任务序列结合机器人协作度对机器人进行任务分配,得到任务分配信息,机器人根据任务分配信息进行作业。
27、一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上所述的一种基于多模态的智能机器人协作调度方法。
28、一种包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行如上所述的一种基于多模态的智能机器人协作调度方法。
29、本发明的有益效果为:
30、1.通过设置有进度预测模块,根据产线运行数据构建生产进度的概率分布函数,根据概率分布函数对生产进度进行预测得到物料短缺预测时间,当所述物料短缺预测时间小于预设阈值时,生成所述物料运输任务信息,实现了生产设备物料的事前调度,保障了产线运行的流畅性和稳定性,提高了产线生产效率;
31、2.通过设置有任务分配模块,根据物料短缺预测时间,并通过锁定生产设备坐标和物料坐标,对物料运输任务信息进行排序得到任务序列,根据任务序列结合机器人协作度对机器人进行任务分配,得到任务分配信息,机器人根据任务分配信息进行作业,实现了物料运输任务和机器人高度匹配,提高了物料运输任务的执行效率。
- 还没有人留言评论。精彩留言会获得点赞!