一种车辆横向控制算法稳定性测试方法及系统与流程
本发明涉及自动驾驶,更具体地,涉及一种车辆横向控制算法稳定性测试方法、系统、电子设备及存储介质。
背景技术:
1、随着自动驾驶技术快速发展,商用车自动驾驶迎来了前所未有的发展机遇。自动驾驶为解决商用车的人力成本、交通事故以及高效作业难题,带来了全新的解决方案。在政策和环境的驱动下,商用车自动驾驶在城市无人公交、港口、矿山、干线物流、末端配送等封闭、半封闭特定场景下开展了大量的示范应用,为其商业化落地和运营积累了宝贵经验。但商用车自动驾驶离人们的预期还有很大的差距,仍面临诸多挑战。
2、商用车在高速公路上实现自动驾驶更需要保证安全性,控制算法的稳定性,特别是在车道内居中行驶,横向误差要在预期内,感知前端输入(如相机车道线道)的稳定性极易影响车辆的横向误差。如何保证在相机突发不稳定性时,自动驾驶的横向功能稳定性,需要经过大量数据验证和测试。
3、以往的技术采用大量的测试用例来验证横向控制算法的稳定性,但是传感器的数据输入具有不可控性,达不到测试用例的输入效果。因此,如何测试商用车自动驾驶车辆在各种相机识别不稳定状况下的横向控制算法的稳定性,是值得研究的问题。
技术实现思路
1、本发明针对现有技术中存在的技术问题,提供一种车辆横向控制算法稳定性测试方法、系统、电子设备及存储介质,通过在横向控制算法中加入车道线系数的干扰项,增加了横向功能稳定性测试的可实施性和测试效率。
2、根据本发明的第一方面,提供了一种车辆横向控制算法稳定性测试方法,包括:
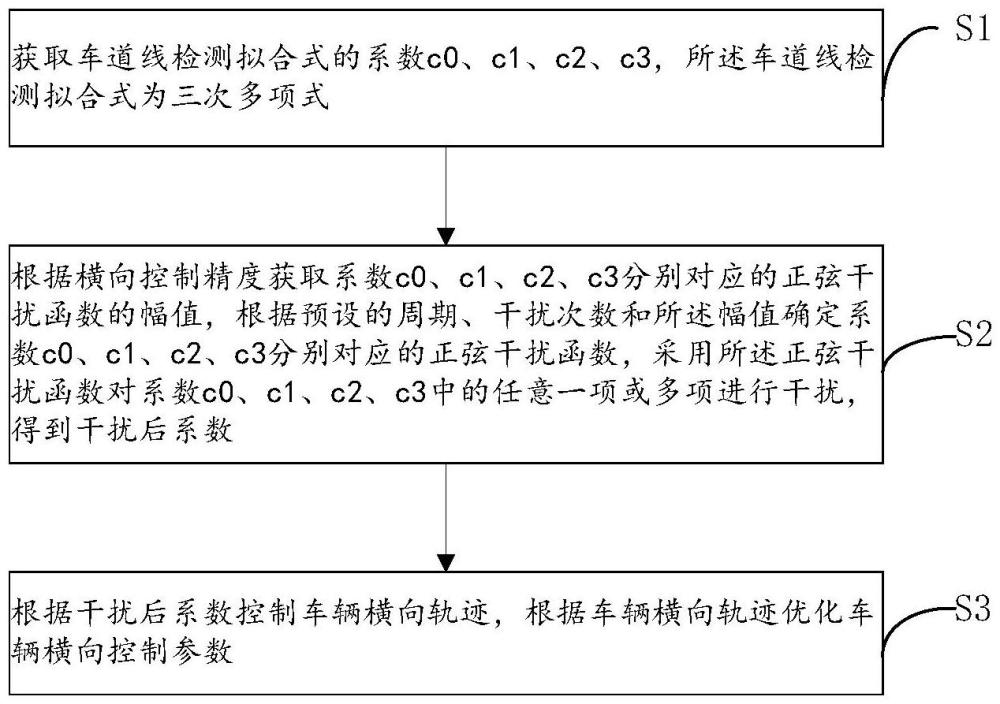
3、s1,获取车道线检测拟合式的系数c0、c1、c2、c3,所述车道线检测拟合式为三次多项式;
4、s2,根据横向控制精度获取系数c0、c1、c2、c3分别对应的正弦干扰函数的幅值,根据预设的周期、干扰次数和所述幅值确定系数c0、c1、c2、c3分别对应的正弦干扰函数,采用所述正弦干扰函数对系数c0、c1、c2、c3中的任意一项或多项进行干扰,得到干扰后系数;
5、s3,根据干扰后系数控制车辆横向轨迹,根据车辆横向轨迹优化车辆横向控制参数。
6、在上述技术方案的基础上,本发明还可以作出如下改进。
7、可选的,步骤s1中,所述车道线检测拟合式的系数c0、c1、c2、c3的初始值根据车辆传感器检测数据获取。
8、可选的,步骤s2中,包括:
9、s201,预设正弦周期t和干扰次数index,根据车辆的横向控制精度确定系数c0、c1、c2、c3分别对应的正弦干扰函数的幅值范围;
10、s202,从各个所述幅值范围中获取系数c0、c1、c2、c3分别对应的幅值,结合所述正弦周期t和干扰次数index以构建系数c0、c1、c2、c3分别对应的正弦干扰函数;
11、s203,采用所述正弦干扰函数对系数c0、c1、c2、c3中的任意一项或多项进行干扰,得到对应的干扰后系数c0’、c1’、c2’、c3’。
12、可选的,步骤s203,包括采用所述正弦干扰函数对系数c0进行干扰,具体包括:
13、获取系数c0对应的正弦干扰函数:
14、c0’=c0+a0*sin(2*π*a*index/t),
15、其中,c0为未施加干扰的常数项系数,c0’为施加干扰后的常数项系数,a0为对系数c0进行干扰的幅值,a为依经验设置的参数,index为干扰次数;index被配置为干扰功能每被调用一次,则index的值累加一次,若index的值超过预设最大干扰次数则清零再从0累加。
16、可选的,步骤s203,还包括采用所述正弦干扰函数对系数c1进行干扰,具体包括:
17、获取系数c1对应的正弦干扰函数:
18、c1’=c1+a1*sin(2*π*a*index/t),
19、其中,c1为未施加干扰的一次项系数,c1’为施加干扰后的一次项系数,a1为对系数c1进行干扰的幅值,a为依经验设置的参数,index为干扰次数;index被配置为干扰功能每被调用一次,则index的值累加一次,若index的值超过预设最大干扰次数则清零再从0累加。
20、可选的,步骤s203,还包括采用所述正弦干扰函数对系数c2进行干扰,具体包括:
21、获取系数c2对应的正弦干扰函数:
22、c2’=c2+a2*sin(2*π*a*index/t),
23、其中,c2为未施加干扰的二次项系数,c2’为施加干扰后的二次项系数,a2为对系数c2进行干扰的幅值,a为依经验设置的参数,index为干扰次数;index被配置为干扰功能每被调用一次,则index的值累加一次,若index的值超过预设最大干扰次数则清零再从0累加。
24、可选的,步骤s203,还包括采用所述正弦干扰函数对系数c3进行干扰,具体包括:
25、获取系数c3对应的正弦干扰函数:
26、c3’=c3+a3*sin(2*π*a*index/t),
27、其中,c3为未施加干扰的三次项系数,c3’为施加干扰后的三次项系数,a3为对系数c3进行干扰的幅值,a为依经验设置的参数,index为干扰次数;index被配置为干扰功能每被调用一次,则index的值累加一次,若index的值超过预设最大干扰次数则清零再从0累加。
28、根据本发明的第二方面,提供一种车辆横向控制算法稳定性测试系统,包括:
29、获取模块,用于获取车道线检测拟合式的系数c0、c1、c2、c3,所述车道线检测拟合式为三次多项式;
30、干扰模块,用于根据横向控制精度获取系数c0、c1、c2、c3分别对应的正弦干扰函数的幅值,并根据预设的周期、干扰次数和所述幅值确定系数c0、c1、c2、c3分别对应的正弦干扰函数,还用于采用所述正弦干扰函数对系数c0、c1、c2、c3中的任意一项或多项进行干扰,以得到干扰后系数;
31、优化模块,用于根据干扰后系数控制车辆横向轨迹,并根据车辆横向轨迹优化车辆横向控制参数。
32、根据本发明的第三方面,提供了一种电子设备,包括存储器、处理器,所述处理器用于执行存储器中存储的计算机管理类程序时实现上述车辆横向控制算法稳定性测试方法的步骤。
33、根据本发明的第四方面,提供了一种计算机可读存储介质,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现上述车辆横向控制算法稳定性测试方法的步骤。
34、本发明提供的一种车辆横向控制算法稳定性测试方法、系统、电子设备及存储介质,从车辆的传感器获取车道线信息并得到车道线检测拟合式,车道线检测拟合式的系数有c0,c1,c2,c3四个参数,在横向控制算法中对这四个参数中的单个或者多个进行正弦噪声干扰,验证车辆横向功能的稳定性。一般常用场景下,c0,c1,c2,c3四个参数的干扰幅值由车辆控制精度需求来确定,因此可精准设置干扰量。本发明在车辆横向控制算法中加入车道线系数的干扰增加了横向功能稳定性测试的可实施性和测试效率,确保商用车自动驾驶车辆在各种相机识别不稳定下的横向算法的稳定性。通过实施本专利申请所描述的测试方案以对横向控制算法进一步优化,可以提高商用车自动驾驶车辆在高速公路上的横向功能的稳定性和安全性。
- 还没有人留言评论。精彩留言会获得点赞!