一种MFC自感知自驱动一体化减振控制装置及方法
本发明属于结构振动控制,具体而言属于一种mfc自感知自驱动一体化减振控制装置及方法。
背景技术:
1、结构的振动控制是一项具有广阔应用前景的工程问题。随着工业的发展及科技水平的不断提高,结构的大型化和柔性化程度越来越高,同时其工作环境也日趋复杂多样。因此,如何对其进行有效的控制,是一个非常重要和富有挑战性的研究课题。板壳结构在船舶与海洋工程、建筑工程、航天工程等领域有着广泛的应用。因此,对其进行深入研究,在理论和实际应用上都有一定的指导作用。但实际工程环境复杂,结构在外部激励作用下容易引起结构振动和噪声,而此类振动与噪音是十分有害的,因此,如何有效地抑制结构振动,降低噪声,是当前结构振动研究领域亟待解决的问题。
2、传统的被动减振控制方法,具有很高的可靠性与鲁棒性,在民用、航海、航空航天等众多领域得到了广泛应用,但存在自适应性不强,且控制效果不好等缺点;而目前的部分自动控制减振装置,结构较为复杂,且一般为分离式减振,无法完全消除振动传递问题,同时还容易受到各种因素的干扰降低减振的效果。
3、有鉴于此,特提出本发明。
技术实现思路
1、本发明的第一目的在于提供了一种mfc自感知自驱动一体化减振控制装置,该装置将mfc传感片和驱动片集成在一个聚酰亚胺薄膜上,形成一体化减振结构,消除振动了传递和振动频率限制的问题;同时本发明所使用的结构能够使mfc传感片与mfc驱动片之间彼此不产生干扰,并避免了相位差,提高了减振控制效果。
2、本发明的第二目的在于提供上述mfc自感知自驱动一体化的减振控制装置安装在被控结构上的确定位置方法,使被控结构与减振装置一体化;该方法同时能够对最优控制传感位置进行确定,以达到最优的减振效果。
3、本发明的第三目的在于一种上述mfc自感知自驱动一体化的减振控制方法,该控制方法与减振控制装置配合,实现了自感知自适应,并具有很强的精确性和灵活性;同时达到良好的减振效果。
4、为实现本发明的上述目的,特采用以下技术方案:
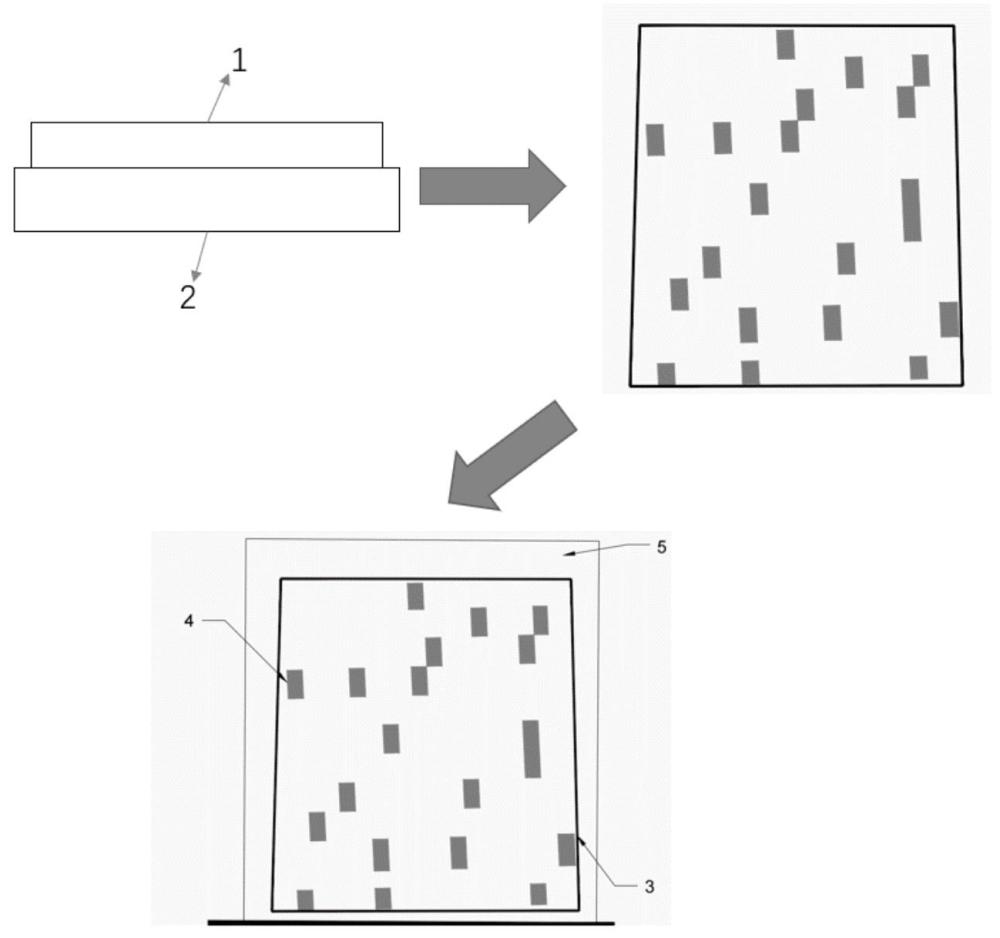
5、本发明提供了一种mfc自感知自驱动一体化减振控制装置,所述减振控制装置安装在被控结构上,包括mfc传感片、mfc驱动片和聚酰亚胺薄膜或依次顺序粘贴的mfc传感片、聚酰亚胺薄膜和mfc驱动片。
6、所述mfc传感片的最长边与所述mfc驱动片的最长的边相等,所述mfc传感片的最短的边是mfc驱动片的最短的边的1/2。
7、mfc压电纤维片作为传感片使用时,将其粘贴在被测物表面,当被测物体发生形变或产生振动时,mfc压电纤维片会产生相应的电荷量。mfc的选择将会对载荷产生影响,不同的载荷量会影响被控的结构的主动控制效果;电荷量过低时难以起到对于被控结构的控制效果,而当电荷量过大时mfc将会击穿损坏。在本发明中,最长边为致动长度,最短边为致动宽度;当mfc传感片的最长边与所述mfc驱动片的最长的边相等,所述mfc传感片的最短的边是mfc驱动片的最短的边的1/2时,能够将减振装置的载荷适宜,同时能够提高mfc驱动片灵活性、耐用性以及可靠性,同时能够定向驱动和感应,并且提高减振的效率;并且提高mfc传感片产生较高的电源电容,能够提高感应的灵敏性和稳定性。
8、聚酰亚胺薄膜易弯曲、绝缘性好、耐高温、具有透明性和尺寸稳定性,能够适应mfc装置工作时发生形变弯曲的特点,能够稳定装置,便于集成。
9、优选地,作为进一步具体的实施方式,所述mfc传感片与mfc驱动片以中心对齐的方式对位粘贴;
10、优选地,所述mfc传感片的最长边与所述mfc驱动片的最长的边平行,或所述mfc传感片的最短的边与mfc驱动片的最短的边平行。
11、在本发明中,mfc传感片和mfc驱动片以中心对齐的方式对位粘贴,mfc传感片和mfc驱动片中间也可以隔着聚酰亚胺薄膜粘贴起来。当聚酰亚胺薄膜粘贴在mfc上时,mfc传感片随着结构振动会发生弯曲,mfc驱动片产生作动力时也会发生弯曲,聚酰亚胺薄膜在中间能够很好的传递力,且因酰亚胺薄膜绝缘性好不会影响各自的传感信号和驱动信号;除此以外,上述粘贴方式能够使驱动片作动和传感片收集信号互不干扰,同时使传感信号和驱动信号无相位差,极大的提高了控制的准确度和精确性。
12、优选地,作为进一步具体的实施方式,所述mfc传感片、mfc驱动片和聚酰亚胺薄膜之间通过环氧树脂胶粘贴。
13、在本发明中,mfc传感片、mfc驱动片和聚酰亚胺薄膜的粘贴方式可以为mfc传感片与mfc驱动片直接粘贴,mfc驱动片与聚酰亚胺薄膜直接粘贴,mfc传感片与被控结构连接;或聚酰亚胺薄膜粘贴于mfc驱动片与mfc传感片之间,mfc传感片与被控结构直接粘贴。
14、在本发明中,mfc传感片和mfc驱动片均可通过环氧树脂胶等液体状或者半固体状粘胶与聚酰亚胺薄膜粘贴连接,可以保证mfc粘贴平整,同时不削弱其减振效果。此外,环氧树脂胶是一种以环氧树脂为主体所制得的胶粘剂,固化后的环氧树脂胶具有优异的物理和化学性能,如高电阻、耐电压、吸水率低、抗压强度高、耐化学性好等,mfc传感片和mfc驱动片均可通过环氧树脂胶等液体状或者半固体状粘胶与聚酰亚胺薄膜粘贴连接,最后也通过环氧树脂胶粘贴在反向粘贴在结构上,使结构具有更好的完整性和稳定性。
15、优选地,作为进一步具体的实施方式,所述mfc传感片与被控结构粘贴。
16、本发明还提供了一种mfc自感知自驱动一体化的减振控制装置安装在被控结构上的确定位置方法,包括如下步骤:
17、将所述被控结构按照所述mfc传感片和所述mfc驱动片的尺寸划分网格;
18、通过matlab算法迭代计算出最优布置的网格位置。
19、在本发明中,需要把被控结构按照mfc传感片和驱动片的尺寸划分网格,随后通过matlab算法迭代计算出最优布置的网格位置,得到结构后再次通过matlab仿真计算验证最优布置位置的减振效果,最后按照这些位置粘贴减振控制装置。该种确定位置的方法能够通过计算得到精确地最优布置位置;同时操作方法简单,根据最优的布置位置粘贴减振装置,能够使后续的减振效果最优。
20、本发明还提供了一种mfc自感知自驱动一体化的减振控制方法,包括如下步骤:
21、所述减振装置接收到振动信号后,将所述振动信号放大,然后通过仿真并对所述振动信号进行反馈;
22、将反馈得到的振动信号经过 lqr 算法或模糊 pid 算法计算后得到控制电压,将所述控制电压进行放大,达到驱动电压;
23、将所述驱动电压释放,对所述被控结构进行振动控制。
24、该种减振方式该方法形成了观测传感信号-施加控制力-反馈传感信号的主动闭环控制。mfc传感片驱动片对贴,通过闭环主动控制系统实现了结构自感知自驱动进行振动控制的效果,自适应能力强,系统能够根据实时感知的振动信息通过自适应调整输出参数达到理想的控制效果。
25、优选地,作为进一步具体的实施方式,lqr算法用于线性系统;所述模糊pid算法用于非线性系统。
26、优选地,作为进一步具体的实施方式,所述仿真为dspace仿真。
27、可根据线性系统和非线性系统确定使用lqr算法或模糊pid算法,lqr算法适合于线性系统,提供了最优控制策略,但需要系统是线性的并且能够准确建模。模糊pid算法适合于处理复杂、非线性系统,具有较强的自适应能力和灵活性,但可能在精确优化方面不如lqr。
28、dspace仿真与本方法适配,能够与matlab衔接,兼容性、可靠性更高。
29、与现有技术相比,本发明的有益效果在于:
30、(1)本发明提供了一种mfc自感知自驱动一体化的减振控制装置,基于mfc的自感知自驱动一体化的减振控制装置首先把mfc驱动片和传感片对位粘贴起来,也可以中间隔着聚酰亚胺薄膜粘贴起来,使驱动片作动和传感片收集信号互不干扰,同时对位粘贴使传感信号和驱动信号无相位差,极大的提高了控制的准确度和精确性。该一体化减振控制装置系统原理清晰,集成粘贴方便,使结构一体化减振。
31、(2)本发明通过优化布置算法计算出最优的控制传感位置,按照最优位置把mfc传感片和驱动片粘贴集成在一大片聚酰亚胺薄膜上,最后反贴在被控结构上面,形成一体化的减振控制装置。该方法易于操作,根据所确定的位置进行粘贴,能够使后续的减振效果更好。
32、(3)本发明的减振控制方法,通过闭环主动控制系统实现了结构自感知自驱动进行振动控制的效果,自适应能力强,系统能够根据实时感知的振动信息通过自适应调整输出参数达到理想的控制效果。
- 还没有人留言评论。精彩留言会获得点赞!