一种用于莲藕采收机的实时监控与数据采集系统
本发明涉及农业机械,尤其涉及一种用于莲藕采收机的实时监控与数据采集系统。
背景技术:
1、农业作为国民经济的基础产业,其现代化转型正日益受到重视。随着科技的进步和市场需求的变化,农业生产向高效、精准、智能化方向发展已成为不可逆转的趋势。莲藕作为一种具有显著经济价值和营养价值的水生作物,其种植与采收环节在农业产业链中占据重要地位。然而,传统的莲藕采收方式存在诸多弊端,如依赖人工操作导致劳动强度大、效率低,以及缺乏科学的数据支持进行精准管理和决策等。
2、现有技术中,莲藕采收技术普遍存在以下不足:首先,监控手段单一且精度不高,无法实现对采收过程的全面、实时、精准监控;其次,数据采集能力有限,往往只能获取部分环境参数,无法全面反映莲藕生长状态和作业环境;最后,缺乏自适应控制和决策支持功能,难以实现精准作业和自动化管理。这些不足严重制约了莲藕采收效率的提升和作业质量的保障。因此,提出一种用于莲藕采收机的实时监控与数据采集系统。
技术实现思路
1、本发明的目的是为了解决现有技术中存在监控手段单一且精度不高,无法实现对采收过程的全面、实时、精准监控;其次,数据采集能力有限,往往只能获取部分环境参数,无法全面反映莲藕生长状态和作业环境;最后,缺乏自适应控制和决策支持功能,难以实现精准作业和自动化管理缺点,而提出的一种用于莲藕采收机的实时监控与数据采集系统。
2、为了实现上述目的,本发明采用了如下技术方案:
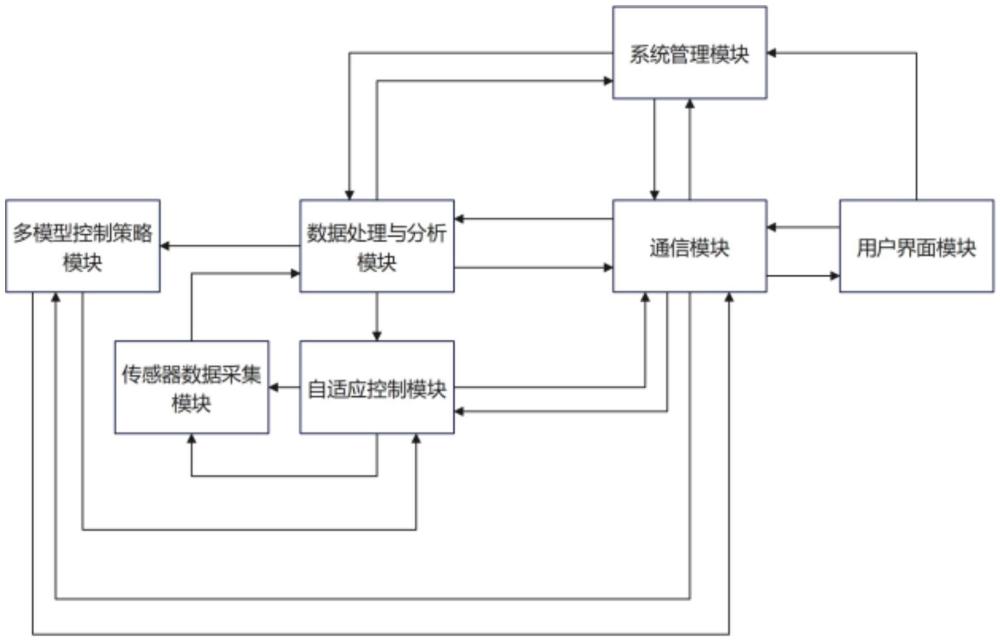
3、一种用于莲藕采收机的实时监控与数据采集系统,包括:传感器数据采集模块,数据处理与分析模块,自适应控制模块,多模型控制策略模块,用户界面模块,通信模块,系统管理模块;
4、所述传感器数据采集模块用于实时采集数据,所述传感器数据采集模块通过数据接口将采集到的数据发送给数据处理与分析模块,所述数据处理与分析模块用于对采集到的数据进行处理和分析,所述数据处理与分析模块通过控制接口将处理后的数据和分析结果发送给自适应控制模块,所述自适应控制模块用于根据环境变化实时调整机器参数,所述自适应控制模块通过模型接口将实时调整的机器参数和环境数据发送给多模型控制策略模块,所述多模型控制策略模块用于预测不同环境条件下的最佳作业参数,并选择最适合当前环境的模型进行控制。所述用户界面模块用于提供操作界面,展示实时监控数据和控制参数,所述用户界面模块通过控制接口接收自适应控制模块的实时数据和控制命令,所述通信模块用于实现系统之间的数据传输和远程监控,所述通信模块通过远程接口与用户界面模块连接,所述系统管理模块用于管理整个系统的运行和维护,所述系统管理模块通过日志接口接收数据处理与分析模块生成的日志记录和故障检测结果。
5、上述技术方案优选包括:
6、优选的,所述传感器模块包括:土壤湿度传感器单元,水位传感器单元,温度传感器单元,超声波传感器单元,激光雷达传感器单元,所述土壤湿度传感器单元用于测量土壤湿度,所述水位传感器单元:用于监测水深,所述温度传感器单元:用于监测环境温度,所述超声波传感器单元:用于地形跟随,测量采收机与地面的距离,所述激光雷达传感器单元:用于更精确的地形测量和环境监测,所述传感器数据采集模块负责实时采集莲藕采收作业过程中所需的各种环境参数和机械状态信息。
7、优选的,所述数据处理与分析模块包括:数据预处理单元,实时数据融合算法单元,机器学习模型单元,决策支持系统单元,所述数据预处理单元:包括数据清洗和标准化算法,所述包括数据融合算法和执行单元,所述机器学习模型单元:包括模型训练和预测算法,所述决策支持系统单元:包括决策支持算法和执行单元,所述数据处理与分析模块对采集到的原始数据进行处理、分析和挖掘,提取有价值的信息。
8、优选的,所述自适应控制模块包括:自适应控制算法单元,pid控制器单元,执行器驱动单元,所述自适应控制算法单元:用于调整挖掘深度和速度参数,所述pid控制器单元:用于调整采收机的高度,所述执行器驱动单元:用于驱动液压系统和电机执行控制命令,所述自适应控制模块根据环境变化和作业需求,自动调节采收机的作业参数,实现智能化控制。
9、优选的,所述多模型控制策略模块包括:模型选择器单元,模型训练与更新单元,预测与评估单元,所述模型选择器单元:用于根据当前环境条件选择最佳模型,所述模型训练与更新单元:用于使用历史数据训练和更新模型,所述预测与评估单元:用于预测环境变化趋势,评估模型性能,所述多模型控制策略模块,提供多种控制模型以适应不同的作业环境和任务需求,并通过学习和优化不断提高控制效果。
10、优选的,所述用户界面模块包括:图形用户界面单元,交互组件单元,远程控制接口单元,所述图形用户界面单元:用于显示数据图表和操作界面,所述远程控制接口单元:用于支持远程监控和控制,所述交互组件单元:用于提供操作按钮和控制旋钮的交互设计,所述用户界面模块,提供友好的人机交互界面,方便用户查看作业状态、调整作业参数、接收故障报警。
11、优选的,所述通信模块包括:网络通信协议单元,远程监控接口单元,所述网络通信协议单元:用于数据传输,所述远程监控接口单元:用于支持远程访问和控制,所述通信模块实现系统内部各模块之间以及与外部设备或系统的通信。
12、优选的,所述系统管理模块包括:日志记录单元,故障检测与报告单元,系统配置与更新单元,所述日志记录单元:用于记录系统运行和操作日志,所述用于实时监控系统状态,发现故障及时报警,所述系统配置与更新单元:用于管理系统配置和软件更新,所述系统管理模块负责系统的整体管理和维护,确保系统的稳定运行和持续优化。
13、优选的,所述实时数据融合算法单元执行过程的具体步骤:
14、进一步的,数据采集:通过传感器模块实时采集莲藕田的环境数据;
15、进一步的,数据预处理:通过数据预处理单元清洗和标准化采集到的数据;
16、进一步的,实时数据融合算法:
17、进一步的,首先将多个传感器记作首先将多个传感器记作z1(k),z2(k),z3(k)...zn(k)其中k是时间步,n是传感器的标号;
18、进一步的,状态估计预测:其中是预测下一个状态估计,f是状态空间模型,u(k)是控制输入,w(k)是过程噪声;
19、进一步的,卡尔曼增益计算:其中k(k)是卡尔曼增益,是预测的误差协方差矩阵,s(k)是测量噪声协方差矩阵;
20、进一步的,状态估计更新:其中是更新后的状态估计,z(k)是实际的测量值,是预测的测量值;
21、进一步的,误差协方差更新:其中是更新后的误差协方差矩阵。
22、优选的,所述自适应控制算法单元根据实时数据融合算法的结果,使用自适应控制算法生成控制策略,所述pid控制器单元使用控制算法调整机器参数,所述执行器驱动单元将控制策略转换为具体的控制命令,并发送给执行器,所述模型选择器单元根据当前环境条件,从多个模型中选择最适合的模型,例如最佳挖佳深度=f(土壤湿度,水深,莲藕生长状况)来输出最佳挖掘深度,所述模型训练与更新单元使用历史数据训练和更新多模型控制策略中的机器学习模型,所述预测与评估单元预测环境变化趋势,评估模型性能。
23、优选的,所述激光雷达传感器测距精度为正负两厘米。
24、本发明具备以下有益效果:
25、1、本发明中,通过集成高精度传感器如超声波传感器、激光雷达传感器等,实时捕捉并呈现莲藕田的三维环境信息。这一功能使得操作人员能够远程且直观地监控到莲藕的生长状态、位置分布以及周围环境的变化。同时,系统内置的实时数据融合算法单元,将来自不同传感器的数据进行快速融合处理,形成更为完整、准确的现场画面,确保监控的实时性和精准性。通过这一实时监控功能,操作人员能够迅速响应环境变化,及时调整作业策略,提高采收效率和质量。
26、2、本发明中,通过土壤湿度传感器、水位传感器、温度传感器等多种传感器设备,实时采集莲藕生长过程中的关键环境参数和机械状态信息。这些数据经过预处理单元的去噪、校准等处理后,被存储在系统中供后续分析和利用。更重要的是,系统利用机器学习模型单元对采集到的数据进行深度分析和挖掘,提取出对采收作业有价值的信息,如最佳采收时机、作业路径优化建议等。
- 还没有人留言评论。精彩留言会获得点赞!