一种基于模糊思想的智能模式切换控制方法及系统
本发明涉及工程结构优化,具体涉及一种基于模糊思想的智能模式切换控制方法及系统。
背景技术:
1、近年来自由活塞内燃发电机fpeg成为在新型动力机械装置方向的研究热点之一,和传统的往复活塞式内燃机相比,fpeg摒除了曲柄连杆机构,它将自由活塞式内燃机与直线发电机耦合为一体,活塞与直线发电机的动子相连,组成唯一的显著运动部件。在fpeg工作过程中,气缸内燃气混合物燃烧后气体膨胀做功,推动活塞组件往复运动切割发电机内部磁感线,将燃料的化学能转换为电能输出,能量传递链大大缩短,能量转换效率得以提高。由于没有曲柄连杆机构,曲轴、飞轮等机械组件被去除,fpeg具有高活塞密度的特点。线性的结构及运动导致活塞及气缸套件的侧向力减小,同时活塞与电机动子组成唯一显著的运动部件,因此fpeg具有较少的摩擦和磨损。同时活塞的往复运动不受机械结构的限制,该发动机具有可变压缩比的特性。可通过调整系统部分软件及硬件设置,使fpeg具备多燃料及多燃烧模式适应性。
2、在实际应用中,大部分的被控对象是非线性和时变的,为了避免复杂的非线性控制,需要在不同的特征点线性化系统,然后根据线性系统理论设计控制器,控制器需要根据不同的特征点进行切换。平滑切换控制是指在多个控制器之间进行平滑切换,以实现系统的平稳切换和无缝过渡。在现代工业控制系统中,由于系统复杂性、失效率、可靠性等各种因素,使用多个控制器对系统进行控制已成为必然趋势。平滑切换控制的研究可以追溯到上世纪70年代,而在近年来随着计算机技术、控制理论、通信技术等领域的不断发展,平滑切换控制也得到了更广泛和深入的研究。目前,该技术已经被应用于航空航天、电力系统、智能交通、机器人、自适应控制等多个领域。在具体应用中,平滑切换控制可以通过对系统状态进行检测、控制器评估、模型预测、过渡策略的设计等方面的优化来实现。其中,平滑切换控制策略的设计是整个系统中最重要的一个环节,能否实现无缝切换将直接影响系统的质量和性能。针对自由活塞内燃电机系统来说,为了实现在不同频率下的活塞轨迹的跟踪,需要设计不同的控制器。一般来说,控制器的不合理切换会导致系统性能的下降,甚至会引起系统的不稳定性,例如控制器的不连续切换会引起控制输出端的抖动。因此研究如何实现控制器平滑切换,并且能够保证闭环系统的稳定性就变得非常重要。
技术实现思路
1、本发明的目的在于,提出一种基于模糊思想的智能模式切换控制方法及系统,通过设计带积分作用的pi控制器实现活塞轨迹的跟踪控制,然后利用模糊思想设计一个随时间连续的控制函数以对控制器实现平滑切换。
2、根据本公开实施例的第一个方面,提供了一种基于模糊思想的智能模式切换控制方法,包括以下步骤:
3、基于模糊思想构建系统隶属度函数;
4、根据动力系统模型的控制策略使用遗传算法设计并优化pi控制器;
5、在不同工况下,实现控制信号的平滑切换。
6、进一步地,基于模糊思想构建系统隶属度函数,包括:
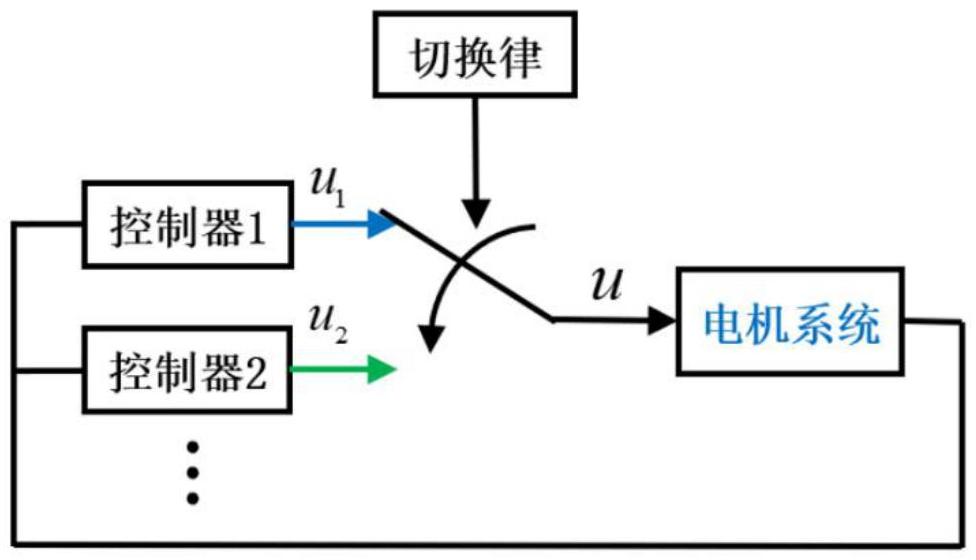
7、设系统在t时刻进行切换,t时刻当前控制器输出为u1,切换后的待激活控制器输出为u2,其u1与u2在切换时刻是不等的,因此设计一段缓冲时间△t,在过渡时间t~t+△t期间,设计控制器:
8、ubt=u2+f(t)*(u1-u2)
9、其中,f(t)是关于时间t的切换函数,通过设计切换函数f(t),控制当前控制器输出的u1和切换后的待激活控制器输出的u2两者比例,使控制信号逐渐平滑转变为u2,即满足在时刻t=t时,f(t)=1,ubt=u1;在t=t+△t时,f(t)=0,ubt=u2。
10、进一步地,通过一个随时间连续变化的平滑切换函数f(t)将两个控制器相连,保证了控制信号的平滑过渡,则f(t)即模糊控制思想中的隶属度函数,当t=t~t+△t时在[0,1]内改变,通过隶属度函数f(t)设计平滑切换控制器;同时在缓冲区结束时,控制输入信号不出现跳跃。因此可以实现控制输入在整个运行过程的平滑切换。
11、进一步地,隶属度函数的选择是模糊控制的关键问题之一,它在很大程度上决定了控制效果的好坏。根据要求,在切换发生的过渡时间△t中,隶属度函数f(t)应在0~1的范围之间变化,并满足切换发生前(t<t)控制信号为ubt=u1,此时f(t)=1;在切换完成后(t>t+△t)控制信号ubt=u2,此时f(t+△t)=0;故隶属度函数在t=t时,该指数函数的指数分子为0,f(t)=1;在t=t+△t时,该指数函数的指数分母为0,即f(t)=0;该负指数函数精确地满足了上述对于隶属度函数的要求,关于时间连续在0~1范围之间变化。
12、进一步的,根据动力系统模型的控制策略使用遗传算法设计并优化pi控制器,包括:
13、设电动机模式下iq是控制量,由iq和位置x,速度和加速度之间的关系,建立一个串级系统,内环控制系统为速度环,外环控制系统为位置环,外环的分数阶pid控制器输入为设定的活塞位置输入信号,即正弦输入信号,输出为活塞运动速度,即速度环的设定值,内环分数阶pid控制器的输入为位置环的偏差值,输出为电动机模式下的控制量iq,通过改变iq来改变电磁力fe,进而控制电机活塞的位置。
14、进一步的,利用遗传算法ga对pid控制器的参数进行优化求解,优化迭代获得pid控制器参数的优化结果,具体方式参加专利文献cn116822413a。
15、进一步的,在不同工况下,实现控制信号的平滑切换,包括:
16、设定两个频率不同的正弦信号即输入信号,通过输入信号的占空比设置切换发生时间,设fpeg1为被控动力系统,输入信号连接了两种pid控制器,分别对应两种工况;
17、直接切换模式下的控制信号输出跟随系统的输入信号切换而选择相应的控制器输出,所以直接切换时若两种pid控制器的控制增益相差较大时,控制信号的输出会发生比较大的跳变,从而可能会影响整个被控系统的暂态性能的稳定性;
18、平滑切换模式下的控制信号则是两种控制器的输出经过了一个切换函数模块,在切换函数的功能下重新组合了两种控制器输出,当系统的输入信号发生切换时,实现控制信号的平滑过渡,进而保证系统性能的稳定性。所述切换函数模块包含7个输入和3个输出,实现的功能为在切换发生时,保持1s的过渡时间,在过渡时间内的控制信号输出为所设计的ubt控制器,在非过渡时间的控制信号则为相应频率所对应的控制器,从而实现在不同工况下函数会根据设计要求输出相应的控制信号,实现控制信号的平滑切换。
19、根据本公开实施例的第二个方面,提供了一种基于模糊思想的智能模式切换控制系统,包括:
20、隶属度函数设计模块,基于模糊思想构建系统隶属度函数;
21、优化模块,根据动力系统模型的控制策略使用遗传算法设计并优化pi控制器;
22、切换模块,在不同工况下,实现控制信号的平滑切换。
23、根据本公开实施例的第三个方面,提供了一种电子设备,包括存储器、处理器及存储在存储器上运行的计算机程序,所述处理器执行所述程序时实现所述的一种基于模糊思想的智能模式切换控制方法。
24、根据本公开实施例的第四个方面,提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现所述的一种基于模糊思想的智能模式切换控制方法。
25、本发明采用的以上技术方案,与现有技术相比,具有的优点是:针对自由活塞直线发电机系统,为了提高系统的动态响应性能以及解决切换控制带来的控制信号突变问题,使用遗传算法对控制器的参数进行了优化,并提出一种基于模糊思想和智能算法的平滑切换控制策略。首先考虑到pid参数的整定问题,使用遗传算法对被控系统的控制器参数进行了优化,提升了系统响应的动态性能。进一步,为了避免控制信号的突变对系统造成危害,提出一种基于模糊思想的智能模式切换控制策略。本发明所优化的控制器参数控制效果相比原始参数更优,所提出的平滑切换控制策略能够在保证控制信号平滑过渡的同时保证系统输出性能的稳定。
26、本发明提出的方法操作简便、满足系统控制精度要求。
- 还没有人留言评论。精彩留言会获得点赞!