一种安全可信数控机床精度可靠度的FMECA方法与流程
本发明属于安全可信数控机床fmeca研究领域,具体涉及一种安全可信数控机床精度可靠度的fmeca方法。
背景技术:
1、数控机床作为制造业的工作母机,是组成现代制造系统的物质基础。而随着技术的进步,用户的个性化需求使得数控机床的结构愈加复杂,工作条件愈加多变,这种多载荷、多任务的工作模式也导致了数控机床多故障模式的特点,给机床的使用和维护带来了诸多困难。
2、故障模式、影响及危害度分析(fmeca,failure modes,effects,andcriticalityanalysis)是一种发现潜在故障的方法,其主要目的是发现可能对系统功能或性能造成不良影响的潜在故障模式。通过fmeca可以确定各个单元可能发生的故障模式及其对系统的影响,从而采取针对性的改进措施,减少由于对单元故障模式认识不清带来的可靠性问题。
3、传统fmeca方法是一种自下而上的分析方法,通常在软件开发的需求分析和概要设计阶段开展。它的分析对象主要是体系结构层的构件、功能模块或者子系统。因此,fmeca方法真正目的是在软件开发早期就对各种可能的故障进行预计及量化评估,若有必要还应采取相应措施加以防止及避免。因此也可以认为fmeca是一种质量管理工具,其实质是一个多目标决策(modm)问题,这需要一个合理的评估方法和结构。
4、传统fmeca方法的不足包括:1)相关领域知识分散、不系统,使得分析结果极大地依赖于分析人员的经验和对待分析系统所属领域的熟悉程度;2)通常基于文本描述,且无工具支持;3)采用精确值表示模糊语义的评分策略,故障模式优先级的排序忽视了各项指标的权重差异,难以获得较准确的分析结果;4)对新增故障模式的识别判断依赖于人工,工作量大、耗时长,而且需要人员具有丰富的工程经验和较高的技术水平,增大了故障模式分类识别过程中出错的风险。
技术实现思路
1、本发明的目的是提供一种安全可信数控机床精度可靠度的fmeca方法,能够通过对传统fmeca方法的改进实现安全可信数控机床精度可靠度的fmeca分析。
2、为了实现上述目的,本发明的一个方面提供一种安全可信数控机床精度可靠度的fmeca方法,包括:
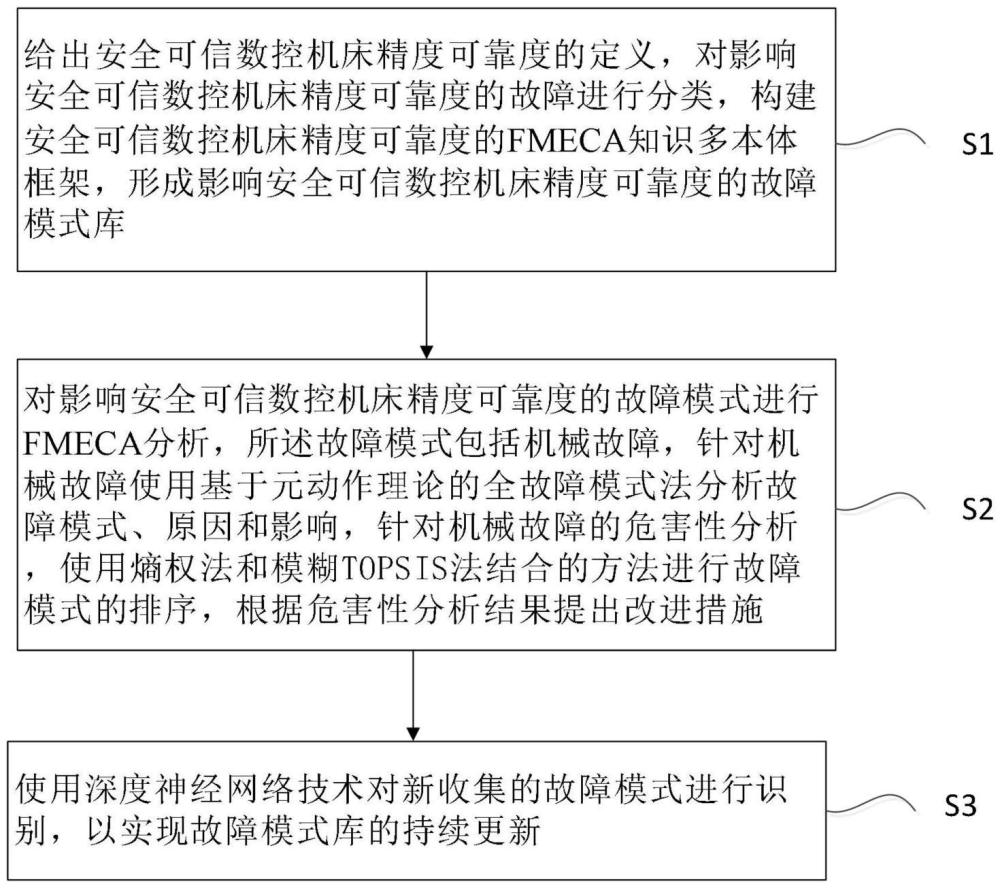
3、步骤s1:给出安全可信数控机床精度可靠度的定义,对影响安全可信数控机床精度可靠度的故障进行分类,构建安全可信数控机床精度可靠度的fmeca知识多本体框架,形成影响安全可信数控机床精度可靠度的故障模式库;
4、步骤s2:对影响安全可信数控机床精度可靠度的故障模式进行fmeca分析,所述故障模式包括机械故障,针对机械故障使用基于元动作理论的全故障模式法分析故障模式、原因和影响,针对机械故障的危害性分析,使用熵权法和模糊topsis法相结合的方法进行故障模式的排序,根据危害性分析结果提出改进措施;
5、步骤s3:使用深度神经网络技术对新收集的故障模式进行识别,以实现故障模式库的持续更新。
6、优选地,在步骤s1中,给出安全可信数控机床精度可靠度的定义为:数控机床在规定加工条件下、规定加工时间内,其加工精度保持在规定范围内的概率,将影响安全可信数控机床精度可靠度的故障分类为机床本体故障和电气系统与数控系统故障,其中,机床本体故障均为机械故障,电气系统与数控系统故障包括机械故障、电机与电子元器件故障、软件故障。
7、优选地,机械故障模式包括运动轨迹故障模式、运动速度故障模式、位置定位故障模式,软件故障模式包括与加工程序编制和处理相关的加工程序故障模式以及由网络安全防护手段缺失导致的安全防护故障模式,安全防护故障模式包括故意故障模式和过失故障模式。
8、优选地,在步骤s1中,构建安全可信数控机床精度可靠度的fmeca知识多本体框架包括:
9、构建安全可信数控机床的精度可靠度fmeca知识本体的泛化本体;
10、以收集的故障模式数据为基础,通过对领域核心概念和关联的丰富,形成以安全可信数控机床精度可靠度的fmeca因果关系链为核心的领域本体概念空间,从而构建安全可信数控机床的精度可靠度fmeca知识本体的领域本体;
11、以收集的故障模式数据为基础,对应用域的故障模式数据和改进措施进行细化,通过对应用域核心概念和关联的丰富,形成以安全可信数控机床精度可靠度的fmeca因果关系链为核心的应用本体概念空间,从而构建安全可信数控机床的精度可靠度fmeca知识本体的应用本体。
12、优选地,在步骤s2中,针对机械故障使用基于元动作理论的全故障模式法分析故障模式、原因和影响包括:将机械传动系统的故障模式定义在元动作的运动形式上,故障原因定义在元动作单元的机械结构上,故障影响定义为元动作的每一个故障模式对其自身所在的约定层次以及产品功能的影响。
13、优选地,在步骤s2中,使用熵权法和模糊topsis法相结合的方法进行故障模式的排序包括:
14、假设m个故障模式fmi,i=1,2,...,m和n个评估指标,每个故障模式的第j个指标值cj,j=1,2,...,n,由多个专家的评估获得,设有k个专家进行评估,将k组专家评估结果转化为模糊数集合,得到第k组的第i个故障模式的第j个指标的评估模糊结果为:
15、
16、根据基于评估模糊结果的模糊决策矩阵,使用熵权法得到故障模式的模糊风险因子的权重,然后使用模糊topsis法对所有故障模式进行排序。
17、优选地,如下使用熵权法得到故障模式的模糊风险因子的权重:
18、令表示熵,其中pi是从概率密度函数p计算而来的随机变量概率,使用将模糊数转化成精确值,并使用i=1,2,...,m,j=1,2,...,n进行归一化处理,其中,xij表示第i个故障模式对第j个指标的精确值;
19、设其中,k>0,ej≥0,ln是自然对数,定义gj=1-ej为多样化指标,当gj越大时,指标j的权重越大,当得到所有指标的多样化指标后,故障模式的模糊风险因子的权重为j=1,2,…,n。
20、优选地,如下使用模糊topsis法对所有故障模式进行排序:
21、将模糊决策矩阵归一化;
22、计算加权模糊决策矩阵其中,wj是故障模式的模糊风险因子的权重,rij是归一化后的模糊决策矩阵中的元素;
23、确定正理想解和负理想解
24、计算理想解距离,得到i=1,2,…,m,i=1,2,...,m,其中,表示两个模糊数的间距;
25、计算贴近度以对所有故障模式排序:i=1,2,…,m。
26、优选地,步骤s3中,使用深度神经网络技术对新收集的故障模式进行识别包括:数据集构建、故障模式神经网络构建、模型训练和模型识别,其中,故障模式神经网络构建使用基于ds-级联区域卷积神经网络进行机床故障模式识别。
27、优选地,采用resnet101作为特征提取网络,并将残差网络101最后部分的卷积层替换为可变形卷积,将可变形卷积输出的特征图输入到空间注意力模块,经区域提议网络进行候选区域的选取后,将候选目标区域的特征和空间注意力模块输出的特征图通过池化层统一尺寸后融合,之后输入全连接层进行分类;在回归分支部分,采用卷积层以保留更多空间信息,级联检测器将三个检测器串联,对前一层输出的边框回归域重采样,作为新输入送到下一层检测器中,逐步提升样本质量和网络训练效果,得到一系列机床故障模式分类和区域预测框。
28、根据本发明上述方面的安全可信数控机床精度可靠度的fmeca方法,通过fmeca知识本体构建、针对机械故障的危害度分析和使用深度神经网络技术进行故障模式库的持续更新三方面,实现安全可信数控机床精度可靠度的fmeca分析。
- 还没有人留言评论。精彩留言会获得点赞!