一种多支脚作业设备的姿态控制方法及系统与流程
本发明涉及车辆状态控制,尤其涉及一种多支脚作业设备的姿态控制方法及系统。
背景技术:
1、作业设备在工作过程中必须保持质心稳定,防止侧倾事故的发生。申请号为cn202110609062.2的中国专利申请公开了一种四腿支撑作业平台的自动调平方法,该方法首先确定作业平台和上装载荷的质心位置,并划分主、从动支腿承载关系,将从动支腿调至虚腿状态,再控制全部支腿同步作动执行调平。该方法在调平过程中质心始终处于主动支腿的承载区间内,无振荡、鲁棒性高。若作业设备在作业过程中质心发生非线性改变,主、从动支腿承载关系发生变化,调平过程可能发生反复振荡。
2、申请号为cn202110742181.5的中国专利申请公开了一种上装作业中汽车起重机底盘的姿态保持自动控制方法。该方法测试并获取各支腿的等效刚度,根据各支腿载荷计算起重机质心坐标位置和吊重质量,进而建立汽车起重机及吊重整体的质心坐标参数化模型与支腿补偿作动量模型,再计算并判断执行吊重起升离地引起平台侧倾需要的的支腿补偿作动,同步控制上装作业和支腿补偿作动,直至姿态保持控制结束。该方案对起重机的回转角度进行了详细分析,获得了一般化的水平作业状态参数。该方法实现了作业过程中的支腿补偿同步控制,保持了汽车起重机作业过程中姿态实时稳定。但是该方案没有考虑汽车起重机参数的变化对作业效率的影响,且不适用于工作面倾斜的纵向振动作业设备。
技术实现思路
1、为了解决上述现有技术存在的缺陷,本发明提出了一种多支脚作业设备的姿态控制方法及系统,适用于处于非水平作业面的作业设备。在作业状态前通过第一输出参数初步调整作业设备的姿态,在作业状态中通过第二输出参数降低姿态调节对作业的影响。进一步的,本发明通过调整第一控制器和第二控制器改变调整第二输出参数的速度,避免超调或者误差积累影响质心振荡。
2、本发明的技术方案是这样实现的:
3、一种多支脚作业设备的姿态控制方法,包括以下步骤:
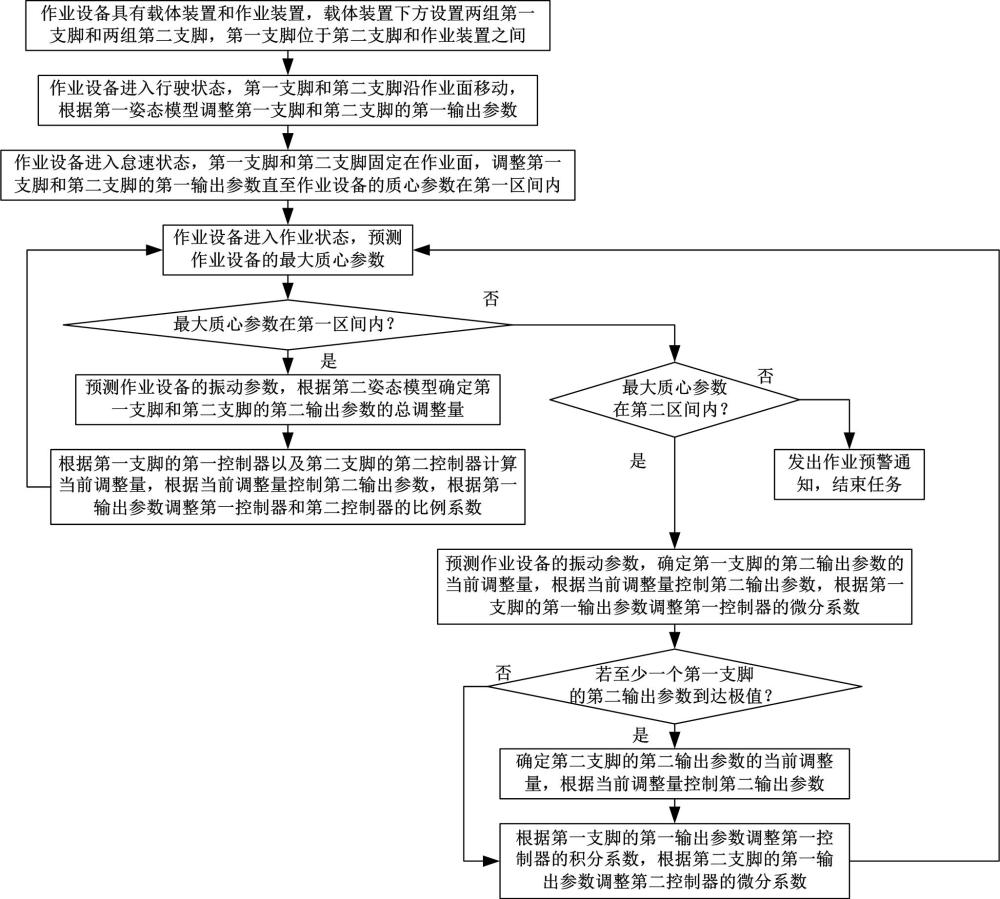
4、步骤1:作业设备具有载体装置和作业装置,载体装置下方设置两组第一支脚和两组第二支脚,第一支脚位于第二支脚和作业装置之间;
5、步骤2:作业设备进入行驶状态,第一支脚和第二支脚沿作业面移动,根据第一姿态模型调整第一支脚和第二支脚的第一输出参数;
6、步骤3:作业设备进入怠速状态,第一支脚和第二支脚固定在作业面,调整第一支脚和第二支脚的第一输出参数直至作业设备的质心参数在第一区间内;
7、步骤4:作业设备进入作业状态,预测作业设备的最大质心参数,若最大质心参数在第一区间内,进入步骤5,否则进入步骤7;
8、步骤5:预测作业设备的振动参数,根据第二姿态模型确定第一支脚和第二支脚的第二输出参数的总调整量;
9、步骤6:根据第一支脚的第一控制器以及第二支脚的第二控制器计算当前调整量,根据当前调整量控制第二输出参数,根据第一输出参数调整第一控制器和第二控制器的比例系数,返回至步骤4;
10、步骤7:若最大质心参数在第二区间内,进入步骤8,否则发出作业预警通知,结束任务;
11、步骤8:预测作业设备的振动参数,确定第一支脚的第二输出参数的当前调整量,根据当前调整量控制第二输出参数,根据第一支脚的第一输出参数调整第一控制器的微分系数;
12、步骤9:若至少一个第一支脚的第二输出参数到达极值,确定第二支脚的第二输出参数的当前调整量,根据当前调整量控制第二输出参数;
13、步骤10:根据第一支脚的第一输出参数调整第一控制器的积分系数,根据第二支脚的第一输出参数调整第二控制器的微分系数,返回至步骤4。
14、在本发明中,在步骤2中,确定工作面的斜倾角α和第一支脚的姿态倾角γ,根据第一姿态模型预测第一支脚的姿态调整角β,再根据姿态调整角计算第一输出参数的目标值,将第一输出参数从当前值l1调整为目标值,第一姿态模型为,h1为作业设备的质心坐标到工作面的垂直距离,s1为第一支脚到质心坐标的距离。
15、在本发明中,在步骤4中,测量怠速状态下作业设备的质心向量q1和作业装置的初始位置向量q2,输入作业装置的作业位置向量q3,计算作业状态下作业设备的质心向量q4,再计算作业状态下的质心偏移向量c2,所述最大质心参数为质心偏移向量的模长最大值,其中,,m0为作业设备的质量,m1为作业装置的质量,c2=q4-q0,q0为第一支脚和第二支脚组成的支点中心向量,若max(∣c2∣)≤r1cosα,则最大质心参数在第一区间内,r1为行驶状态下的安全姿态偏移。
16、在本发明中,在步骤5中,所述振动参数为作业设备的目标刚度,根据作业设备的作业振动模型预测目标刚度k0,其中,作业振动模型为,ω为作业面的固有频率,μ为作业面的等效刚度,m2为作业面的振动质量。
17、在本发明中,在步骤5中,采集两组第一支脚的压力f1、f2以及两组第二支脚的压力f3、f4,输入第一支脚的第二控制参数的当前值k1以及第二支脚的第二控制参数的当前值k2,根据目标刚度预测第二控制参数的总调整量δk,第二姿态模型为k0=[(f1+f2)(k1+δk)+(f3+f4)(k2+δk)]/(f1+f2+f3+f4)。
18、在本发明中,在步骤6中,第一控制器为,δp1为第一控制器的比例系数,δi1为第一控制器的积分系数,δd1为第一控制器的微分系数;
19、第二控制器为,δp2为第二控制器的比例系数,δd2为第二控制器的微分系数;
20、将δg1=δg2=δk代入第一控制器和第二控制器,确定第一支脚的当前调整量g1和第二支脚的当前调整量g2,t为调整时长。
21、在本发明中,在步骤6中,第一支脚的第一输出参数的伸长量为δl1,第一控制器的比例系数,为比例系数的调节步长,l0为第一输出参数的初始值。
22、在本发明中,在步骤7中,若r1cosα<∣c2∣≤r2cosα,则质心参数在第二区间内,r2为作业状态下的安全姿态偏移,r1<r2。
23、在本发明中,在步骤8中,采集两组第一支脚的压力f1、f2以及两组第二支脚的压力f3、f4,输入第一支脚的第二控制参数的当前值k1以及第二支脚的第二控制参数的当前值k2,设置第三姿态模型k0=((f1+f2)(k1+δk)+(f3+f4)k2)/(f1+f2+f3+f4),根据第三姿态模型确定第一支脚第二输出参数的总调整量δk。
24、一种实现所述多支脚作业设备的姿态控制方法的姿态控制系统,包括:
25、一作业设备,作业设备具有载体装置和作业装置,载体装置下方设置两组第一支脚和两组第二支脚;
26、状态控制装置,被配置为控制作业设备进入怠速状态、行驶状态以及作业状态;
27、第一姿态调整装置,被配置为调整第一支脚和第二支脚的第一输出参数;
28、数据分析装置,被配置为根据第一控制器和第二控制器确定第二输出参数的当前调整量;
29、第二姿态调整装置,被配置为调整第一支脚和第二支脚的第二输出参数;
30、系数调整装置,被配置为调整第一控制器的比例系数、积分系数和微分系数,第二控制器的比例系数和微分系数。
31、实施本发明的这种多支脚作业设备的姿态控制方法及系统,具有以下有益效果:在行驶状态下,调整第一支脚和第二支脚的第一输出参数,降低沿倾斜的作业面移动时的侧倾风险。在怠速状态下,将第一支脚和第二支脚固定在作业面,控制作业设备的质心参数在第一区间内,避免质心移动,提高后续作业状态调节质心参数的鲁棒性,避免反复振荡。在作业状态下,调整第一支脚和第二支脚的第二输出参数,使得作业设备的刚度参数满足作业面的要求。进一步的,本发明设置两种姿态条件,分别调整第一控制器和第二控制器,避免超调或者误差积累影响质心稳定。
- 还没有人留言评论。精彩留言会获得点赞!