基于人工智能的多级任务多机器人协同运动规划系统
本发明涉及机器人运动规划,特别涉及一种基于人工智能的多级任务多机器人协同运动规划系统。
背景技术:
1、运动规划是机器人控制和机器人学中的一个基本问题。通常,为了在不与操作环境中的任何障碍碰撞或者减少与操作环境中的任何障碍碰撞的可能性的情况下完成任务,运动规划指定了机器人从开始状态到目标状态能够遵循的路径。当两个或更多个机器人在一个工作区域内移动执行任务时,机器人可能在执行任务期间彼此干扰。并且,不同机器人所分配的任务可能优先级别不同,因此需要确保有时间限制的任务能够根据紧急程度优先完成。不仅如此,在实际的工作环境中,不同的路径其宽度可能不同,对于宽度较大的路径可以容许两个或两个以上的机器人通过而不发生碰撞,宽度较小的路径则可能只容许一个机器人通过。因此,在给同一工作区域的多个机器人分配任务并进行路径规划时,需要充分考虑以上的影响因素。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种基于人工智能的多级任务多机器人协同运动规划系统,能够实现多任务级别的多机器人协同路径规划。
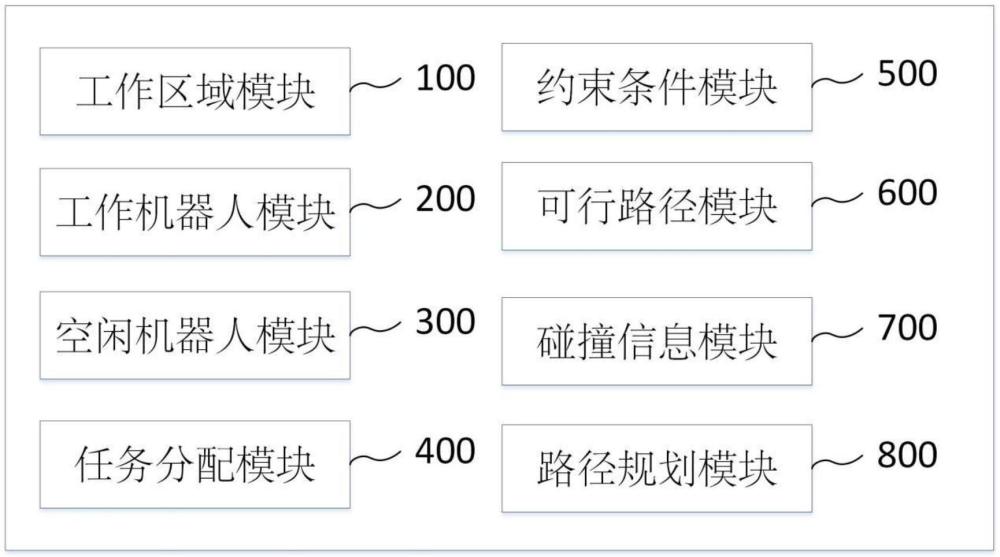
2、本发明实施例一方面提供一种基于人工智能的多级任务多机器人协同运动规划系统,包括:工作区域模块,用于获取多机器人共同工作的工作区域的地图信息,包括若干节点和边组成的拓扑图和所述边的宽度;对节点和边进行编码,得到节点编号和路段编号;工作机器人模块,用于获取当前执行任务的机器人的位置信息和路径规划信息;空闲机器人模块,用于获取当前空闲的机器人的位置信息;任务分配模块,用于获取若干待分配任务,根据所述待分配任务的起点终点信息和空闲机器人的位置信息将所述待分配任务就近分配给空闲机器人;约束条件模块,用于根据任务优先级设置约束条件;所述约束条件包括任务执行时间阈值;可行路径模块,用于根据所述地图信息和任务的起点终点信息生成路径集合,并根据机器人运动速度、路径长度和任务执行时间阈值得到可行路径集合;所述可行路径集合包括若干可行路径,所述可行路径为若干路段编号的序列;碰撞信息模块,用于获取当前执行任务的机器人的位置信息和路径规划信息,并根据所述可行路径集合中的路径和机器人运动速度得到碰撞信息;所述碰撞信息包括机器人标识、可行路径标识和路段编号;路径规划模块,用于根据所述可行路径集合为已分配任务的机器人随机生成若干可行解,将所述若干可行解作为个体,得到遗传算法的初始种群;基于遗传算法和适应值计算得到多任务级别的多机器人的路径规划信息;其中,所述适应值t为:其中,n为已分配任务的机器人总数,si为第i个机器人当前选择的路径的长度,vi为第i个机器人的运动速度,c为系数,st,i为第i个机器人当前选择的路径的转弯次数,θi为第i个机器人转弯角度平均值,sl,i为第i个机器人可能发生碰撞路段的宽度,ta(sl,i)为当可能发生碰撞时机器人所需的避让时间。
3、根据本发明的一些实施例,所述工作区域模块包括:地图信息采集单元,用于通过机器人在工作区域移动一周,并基于移动机器人的激光雷达对周围环境进行扫描,得到激光雷达扫描数据,并基于所述激光雷达扫描数据生成地图信息;所述地图信息包括拓扑图和拓扑图中各边的宽度。
4、根据本发明的一些实施例,所述工作区域模块包括:地图信息更新单元,用于通过获取工作机器人的实时激光雷达扫描数据和机器人实时位置信息,对所述地图信息进行更新操作。
5、根据本发明的一些实施例,所述碰撞信息模块用于获取当前执行任务的机器人的位置信息和路径规划信息,计算得到机器人将来经过的路段编号和对应的时间段;并依次获取所述可行路径集合中的可行路径,根据机器人运动速度计算得到每一可行路径的机器人计划经过的路段编号和对应的时间段;根据路段编号和对应的时间段得到同一时间段内在同一路段的多个机器人,并根据多个机器人的运动方向得到所述碰撞信息。
6、根据本发明的一些实施例,所述路径规划模块用于基于遗传算法和适应值计算得到多任务级别的多机器人的路径规划信息,包括:根据所述可行路径集合随机生成若干可行解,将所述若干可行解作为个体,得到初始种群;计算个体的适应值,并进行选择操作,选择适应值较低的个体进入下一代种群,将适应值较高的个体舍去;执行交叉操作和变异操作生成新的个体,得到下一代种群;对下一代种群根据适应值进行选择操作;根据预设终止条件确定是否终止;输出最终得到的多任务级别的多机器人的路径规划信息。
7、根据本发明的一些实施例,所述路径规划模块用于在计算适应值时,获取当前选择的可行路径的路段编号序列,根据序列长度得到转弯次数;并获取地图信息中每条相邻的边的夹角计算可行路径中每个路段对应的转弯角度。
8、根据本发明的一些实施例,所述路径规划模块用于计算适应值时,计算当可能发生碰撞时机器人所需的避让时间包括:获取机器人当前选择的可行路径的碰撞信息,得到可能发生碰撞的机器人标识、可行路径标识和路段编号;根据所述路段编号获取对应的宽度,并根据机器人标识获取机器人的尺寸信息,根据所述宽度和尺寸信息确定发生碰撞概率;当发生碰撞概率大于阈值,则根据任务优先级取任务优先级较低的机器人进行路径规划调整操作,增加机器人在发生碰撞路段的上一路段的等待时间,使得任务优先级较高的机器人离开发生碰撞路段的时间早于任务优先级较低的机器人进入发生碰撞路段的时间;将所述等待时间作为机器人所需的避让时间;当发生碰撞概率小于或等于阈值,则取预设值作为机器人所需的避让时间。
9、根据本发明的一些实施例,所述计算当可能发生碰撞时机器人所需的避让时间还包括:当执行所述路径规划调整操作后,更新路段编号和对应的时间段,根据更新后的路段编号和对应的时间段确定同一时间段内在同一路段的多个机器人,并根据多个机器人的运动方向得到更新后的碰撞信息。
10、根据本发明的一些实施例,所述系统还包括:速度设置模块,用于为机器人预设多档运动速度;第二路径规划模块,用于根据所述约束条件和运动速度确定每个机器人的可行路径及速度集合;所述可行路径及速度集合包括若干个点,每个点表示可行路径序列和运动速度;根据任务优先级、路径长度、运动速度、转弯次数、转弯角度和避让时间确定第二适应值,基于所述可行路径及速度集合得到初始种群,并基于第二适应值和遗传算法得到多任务级别的多机器人的路径规划信息。
11、根据本发明的一些实施例,所述第二适应值t*为:
12、其中,n为已分配任务的机器人总数,为第i个机器人当前分配任务优先级对应的权重,si为第i个机器人当前选择的路径的长度,vi为第i个机器人的运动速度,c为系数,st,i为第i个机器人当前选择的路径的转弯次数,θi为第i个机器人转弯角度平均值,sl,i为第i个机器人可能发生碰撞路段的宽度,ta(sl,i)为当可能发生碰撞时机器人所需的避让时间。
13、本发明实施例的基于人工智能的多级任务多机器人协同运动规划系统至少包括以下有益效果:本发明实施例通过获取工作区域的地图信息确定各个路段的长度和宽度信息,以及确定机器人经过相邻的路段需要的转弯角度,通过以上路段实际信息实现对可行路径的评估;通过对空闲机器人进行任务分配,确定任务级别的执行时间阈值,得到机器人执行任务选择路径时的约束条件,确保选择的路径能够让机器人在规定的时间内完成任务;通过约束条件筛选可行路径,并基于遗传算法选择最优的路径组合,既能在规定的时间内使多个机器人完成任务,又能尽量减少路径转弯带来的时间损耗,并尽量减少机器人的避让时间,使得多个机器人同时执行任务时尽量避免干扰彼此。
14、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!