自移动设备的脱困方法、自移动设备及存储介质与流程
本技术涉及机器人,特别是涉及一种自移动设备的脱困方法、自移动设备及存储介质。
背景技术:
1、随着机器人技术的飞速发展,自移动机器人被应用在各种场景中,如工业生产、物流运输、家用服务等。自移动机器人可以根据环境感知装置进行自动导航移动,但是,因为工作场景复杂,会出现自移动机器人受困的情况,特别是在一些特殊场景中,自移动机器人的环境感知装置感知到的环境信息并不准确,从而影响自移动机器人的工作效率。
2、例如,用于室内家用服务的扫地机器人,通常其外形为圆形的机身,底部安装有可行走的驱动轮,同时具有滚刷,边刷以及吸尘装置等,扫地机器人可分为随机碰撞式扫地机器人,惯性导航式扫地机器人,激光探测与测量(lightdetectionandranging,lds)建图规划式扫地机器人。目前主流的扫地机器人形态依旧为lds建图规划式扫地机器人,这类扫地机器人需要提前确定待清扫区域,并且根据实际情况调度前往对应的区域进行清扫,在清扫过程中lds雷达会通过不断更新周围的环境信息来识别障碍物,但有的时候雷达更新所产生的障碍物并不能完全被认为是百分百可信的,如当扫地机机器人进入床底时,由于lds雷达通常会有1-2度上仰角,此时低矮的床沿或床单对应的雷达数据容易被误检测为障碍物,同时在同时定位与地图构建(simultaneous localization and mapping,slam)对应所建环境地图上就会错误判断为扫地机器人被封闭在床底区间内,导致设备无法规划出一条调度路径,从而使机器人受困,影响清扫效率。
3、因此,针对因为环境感知信息不准确而误判断为自移动机器人受困的情况,如何准确寻找脱困出口,是本领域技术人员亟待解决的问题。
技术实现思路
1、为了解决上述技术问题,本技术至少提供一种自移动设备的脱困方法、自移动设备及存储介质。
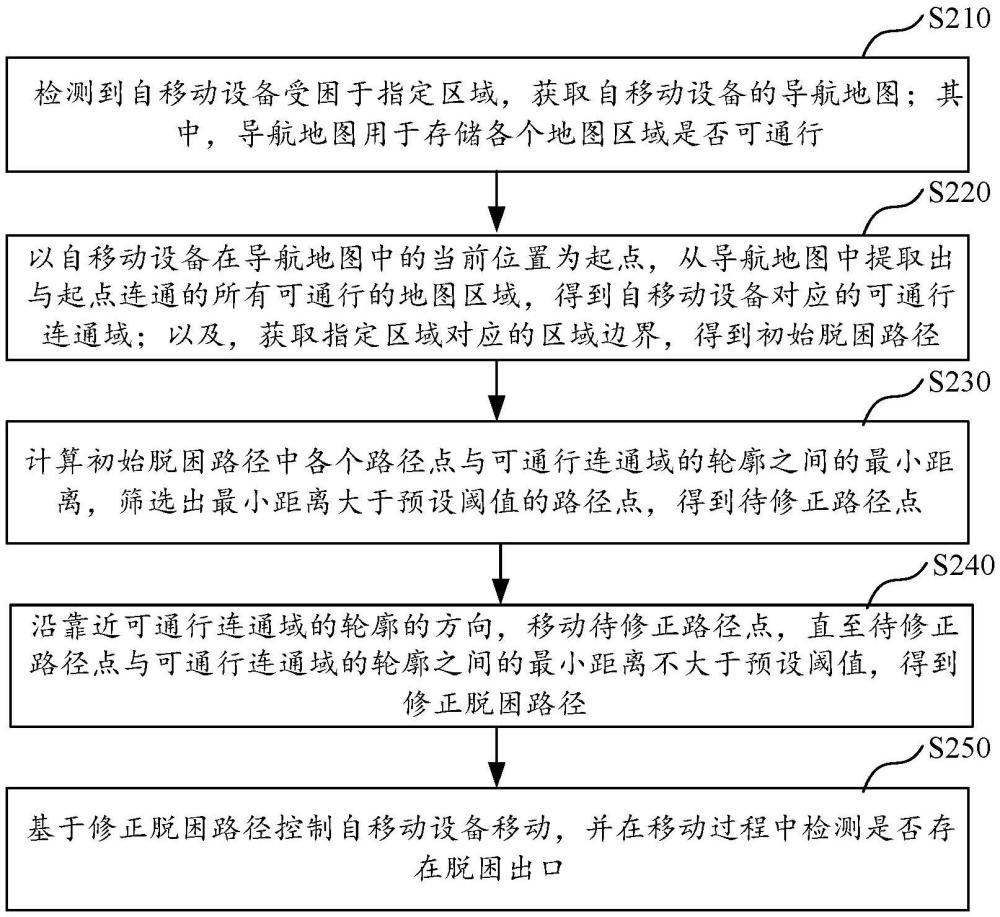
2、本技术第一方面提供了一种自移动设备的脱困方法,方法包括:检测到自移动设备受困于指定区域,获取自移动设备的导航地图;其中,导航地图用于存储各个地图区域是否可通行;以自移动设备在导航地图中的当前位置为起点,从导航地图中提取出与起点连通的所有可通行的地图区域,得到自移动设备对应的可通行连通域;以及,获取指定区域对应的区域边界,得到初始脱困路径;计算初始脱困路径中各个路径点与可通行连通域的轮廓之间的最小距离,筛选出最小距离大于预设阈值的路径点,得到待修正路径点;沿靠近可通行连通域的轮廓的方向,移动待修正路径点,直至待修正路径点与可通行连通域的轮廓之间的最小距离不大于预设阈值,得到修正脱困路径;基于修正脱困路径控制自移动设备移动,并在移动过程中检测是否存在脱困出口。
3、在一实施例中,检测到自移动设备受困于指定区域,包括:获取自移动设备对应的可通行连通域;计算可通行连通域的面积和/或尺寸;若可通行连通域的面积处于预设面积范围内,和/或若可通行连通域的尺寸处于预设尺寸范围内,则判断为自移动设备受困于指定区域。
4、在一实施例中,指定区域包括预设家具的底部区域;获取指定区域对应的区域边界,得到初始脱困路径,包括:获取预设家具的尺寸;基于预设家具的尺寸确定预设家具的底部区域;获取预设家具的底部区域对应的区域边界,得到初始脱困路径。
5、在一实施例中,获取预设家具的尺寸,包括:检测预设家具的支撑脚位置;连接各个支撑脚位置,得到预设家具的尺寸。
6、在一实施例中,在计算初始脱困路径中各个路径点与可通行连通域的轮廓之间的最小距离,筛选出最小距离大于预设阈值的路径点,得到待修正路径点之前,还包括:计算可通行连通域的轮廓与初始脱困路径之间的线条相似度;基于线条相似度设定路径点提取间距;按照路径点提取间距,从初始脱困路径中提取得到多个路径点。
7、在一实施例中,自移动设备部署有出风组件、气流传感器、至少部分伸出自移动设备覆盖面范围之外的旋转清洁组件;基于修正脱困路径控制自移动设备移动,并在移动过程中检测是否存在脱困出口,包括:基于修正脱困路径控制自移动设备移动,并在移动过程中控制出风组件向预设方向发射气流,和/或控制旋转清洁组件在预设方向工作;获取气流传感器采集得到的气流信息,和/或获取旋转清洁组件的工作信息;基于气流信息和/或旋转清洁组件的工作信息,确定预设方向是否存在脱困出口。
8、在一实施例中,气流信息包括气流传感器采集得到的气流量;基于气流信息,确定预设方向是否存在脱困出口,包括:获取预设气流阈值,检测气流量是否大于预设气流阈值;若气流量大于预设气流阈值,则判断为预设方向不存在脱困出口;若气流量不大于预设气流阈值,则判断为预设方向存在脱困出口。
9、在一实施例中,旋转清洁组件的工作信息包括旋转清洁组件的转速,旋转清洁组件包括在预设方向工作的第一旋转组件和不在预设方向工作的第二旋转组件;基于旋转清洁组件的工作信息,确定预设方向是否存在脱困出口,包括:获取预设差值阈值和预设转速阈值;计算第一旋转组件的转速与第二旋转组件的转速之间的差值,得到转速差值;检测转速差值是否大于预设差值阈值,并检测第一旋转组件的转速是否小于预设转速阈值;若转速差值大于预设差值阈值,且第一旋转组件的转速小于预设转速阈值,则判断为预设方向不存在脱困出口;若转速差值不大于预设差值阈值,或第一旋转组件的转速不小于预设转速阈值,则判断为预设方向存在脱困出口。
10、本技术第二方面提供了一种自移动设备的脱困装置,装置包括:地图获取模块,用于检测到自移动设备受困于指定区域,获取自移动设备的导航地图;其中,导航地图用于存储各个地图区域是否可通行;连通域获取模块,用于以自移动设备在导航地图中的当前位置为起点,从导航地图中提取出与起点连通的所有可通行的地图区域,得到自移动设备对应的可通行连通域;以及,获取指定区域对应的区域边界,得到初始脱困路径;路径点筛选模块,用于计算初始脱困路径中各个路径点与可通行连通域的轮廓之间的最小距离,筛选出最小距离大于预设阈值的路径点,得到待修正路径点;路径修正模块,用于沿靠近可通行连通域的轮廓的方向,移动待修正路径点,直至待修正路径点与可通行连通域的轮廓之间的最小距离不大于预设阈值,得到修正脱困路径;出口检测模块,用于基于修正脱困路径控制自移动设备移动,并在移动过程中检测是否存在脱困出口。
11、本技术第三方面提供了一种自移动设备,包括存储器和处理器,处理器用于执行存储器中存储的程序指令,以实现上述自移动设备的脱困方法。
12、本技术第四方面提供了一种计算机可读存储介质,其上存储有程序指令,程序指令被处理器执行时实现上述自移动设备的脱困方法。
13、上述方案,通过检测到自移动设备受困于指定区域时,获取自移动设备的导航地图,以自移动设备在导航地图中的当前位置为起点,从导航地图中提取出与起点连通的所有可通行的地图区域,得到自移动设备对应的可通行连通域;以及,获取指定区域对应的区域边界,得到初始脱困路径;筛选出初始脱困路径中与可通行连通域的轮廓之间的最小距离大于预设阈值的路径点,得到待修正路径点,沿靠近可通行连通域的轮廓的方向,移动待修正路径点,直至待修正路径点与可通行连通域的轮廓之间的最小距离不大于预设阈值,得到修正脱困路径,基于修正脱困路径控制自移动设备移动,并在移动过程中检测是否存在脱困出口,可以提高自移动设备的脱困效率,并保证自移动设备在脱困过程中避免碰撞。
14、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!