一种基于预定航线和自主控制的无人机机群河道智能巡检方法、系统及计算机可读存储介质与流程
本发明属于智能控制与图像分析的,更具体地,涉及一种基于预定航线和自主控制的无人机机群河道智能巡检方法、系统及计算机可读存储介质。
背景技术:
1、随着社会对环境保护意识的日益增强,对水资源的管理和保护变得至关重要。河道作为重要的水资源载体,其环境状况直接影响到生态平衡和人类生活。传统的河道巡检方式主要依赖人工,存在效率低、覆盖面窄、实时性差等问题,难以满足现代河道管理的需求。近年来,无人机技术的快速发展为河道巡检提供了新的解决方案,尤其是无人机机群技术的应用,极大地提高了巡检的效率和精度。
2、现有的河道巡检解决方案中,通常是一架无人机巡检,沿着河道中央飞行,并拍摄和巡检整个河道,如果河道长度和巡检时间比较长时,部署多个机巢,无人机依次降落到机巢中进行换点并再次起飞巡检。
3、中国专利文献cn105929845a公开一种基于无人机网络的河道巡航系统与巡航方法,包括无人机、机库和地面控制中心,机库作为无人机的安放平台,多个机库沿河道其中一侧间隔设置,无人机的云台机构上设有摄像头和扩音器,地面控制中心分别与机库和无人机之间进行通讯和数据传输;每个无人机起飞飞到自身机库所位于的河道中央,沿河道飞行拍摄到下一个机库所位于的河道中央时,掉头原路返回拍摄河道另一侧,地面控制中心根据传输回来的视频信息进行图像处理。
4、综上,无人机机群在河道巡检中的应用,可以实现大范围、高频率的监测,但现有的系统往往局限于单架无人机的独立作业,无法充分利用集群优势进行高效协同,导致无人机巡检时无法获取河道细粒度的信息,无法做到精细巡检,可能无法巡检出零散的漂浮垃圾,游泳,无法区分河道两侧的驻足行人和钓鱼行为等。如果单架无人机执行精细巡检,则无法一次获取全貌,需要多次巡检,存在漏洞和死角,如遗漏移动的漂浮垃圾等。
技术实现思路
1、本发明旨在克服上述现有技术的至少一种缺陷,提供一种基于预定航线和自主控制的无人机机群河道智能巡检方法及系统,以解决现有的系统往往局限于单架无人机的独立作业,无法充分利用集群优势进行高效协同,导致无人机巡检时无法获取河道细粒度的信息等问题,适用于城市中的河流河道、河道两侧有河岸和道路的河道巡检。
2、本发明详细的技术方案如下:
3、一种基于预定航线和自主控制的无人机机群河道智能巡检方法,所述方法包括:
4、在本发明的另一个方面当中,在本发明的另一个方面当中,提供了一种基于预定航线和自主控制的无人机机群河道智能巡检方法,所述方法包括:
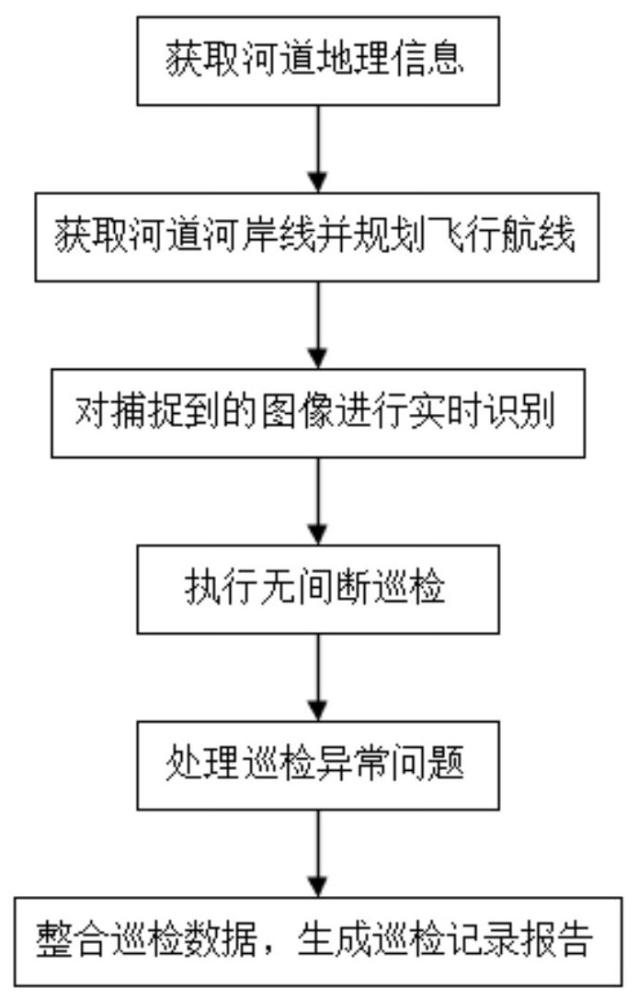
5、s1、获取河道的精确地理信息,数据格式形式为河道河岸线的gps坐标点信息;
6、进一步地,所述精确地理信息包括但不限于河岸线的gps坐标、河道宽度、形状。
7、s2、根据获取的河道河岸线的gps坐标点信息得到河道河岸线,并规划无人机机群飞行航线;
8、s3、在航线任务执行时,每架无人机运行基于yolov8的深度学习模型对捕捉到的图像进行目标检测和分割,快速识别河道中的关键元素,进行实时识别。
9、s4、执行无间断巡检,无人机执行任务期间缺电返回车载机巢进行电池更换后,无人机再次起飞,无缝继续巡检工作;
10、s5、巡检过程中若检测有异常情况,暂停当前航线,悬停在目标上方,对目标进行变焦,将目标放大并进行详细记录取证,取证完毕继续执行任务;
11、s6、巡检完毕之后无人机机群的巡检数据会被整合到系统中,并生成巡检记录报告。
12、无人机机群所有无人机的巡检数据会被整合到系统中,包括拍摄的图像、视频、异常事件记录等,根据无人机机群巡检信息生成完整详细的巡检记录报告。控制端的工作人员会对这些数据进行详细分析,生成巡检报告,包括河道的整体状况、异常事件的总结、处理情况以及可能需要关注的区域。这些报告可以作为决策支持,帮助管理者了解河道环境的变化,制定或调整河道管理策略。通过持续的无间断巡检和数据分析,无人机机群河道巡检系统能够确保对河道环境的持续监控,及时发现并处理问题,从而实现河道的高效管理和保护。
13、进一步地,所述根据获取的河道河岸线的gps坐标点信息得到河道河岸线具体为:
14、若获取的河道河岸线的gps坐标点信息是矢量数据,将其等间距离散化,形成等间距离散点,然后,这些点用直线相连形成的线近似为河道河岸线;
15、若获取的河道河岸线的gps坐标点信息已经是离散点相连形成的近似曲线,则以近似曲线为河道河岸线,同时,将已有离散点进行等间距取值得到等间距离散点。
16、进一步地,所述规划无人机机群飞行航线包括:
17、s21、无人机机群一共有n架无人机,两条河道河岸线宽度为l,无人机机群呈一排前进,则每个无人机巡检的宽度应为:
18、(1);
19、无人机航线在宽度的中线位置,那么第k架无人机的航线位置即航点应为:
20、(2);
21、公式(2)中k=1,2,……,n;
22、s22、由河道河岸线一边侧开始编写无人机的航点id:无人机α,无人机β,……,无人机ε;
23、然后以等间距离散点的一端为开始端进行航点标定,等间距的为无人机的航点id编写下标即从1~n,n为离散点总数,得到无人机航点集合:{无人机α1、无人机α2、……、无人机αn}、……、{无人机ε1、无人机ε2、……、无人机εn};
24、s23、对每个无人机的航点进行拟合,得到无人机机群飞行航线。
25、基于离散点与河道河岸线规划无人机机群飞行航线,利用集群优势进行高效协同,无人机巡检时可获取河道细粒度的信息,做到精细巡检,无多次巡检,不仅实现全方位巡检,而且航线规划更加便捷且高效。
26、进一步地,所述s4具体包括:
27、航线的起点设在车载机巢出发处;
28、无人机机群执行任务时,车载机巢车辆沿河道两侧道路路线在无人机机群周围行驶,当无人机航线执行完毕或无人机电量低于阈值时,无人机飞到车载机巢上方,识别车载机巢并快速降落;
29、当无人机机群落入机巢后,航线暂停,无人机航线暂停,机巢对机群中所有无人机进行换电,换电完成后可再次起飞,继续执行航线。
30、进一步地,在无人机机群在执行航线任务中时,将按照航点id下标顺序和位置进行自主控制和移动,通过无人机定位信息引导无人机前往下一个航点;在河道弯道处,无人机机群中每个无人机自行控制速度抵消外圈和内圈的移动距离差,使在相同时刻的航点id顺序是相同的,进而保证无人机机群在执行航线时具有位置同步性,所述航线任务执行时还包括在河道弯道处自行控制速度:
31、无人机机群的巡检飞行速度由预先设定,当无人机机群中的一架无人机的航点id下标编号低于当前所有无人机的平均航点id下标编号时,将增加自身速度;同理,当无人机机群中的一架无人机的航点id下标编号高于当前所有无人机的平均航点id下标编号时,降低自身速度;
32、每隔z个航点进行一次自行控制速度,每次增加或降低自身om/s速度。
33、进一步地,当无人机机群巡检过程中,当河岸变宽或变窄时,统一对无人机的云台相机进行变焦调整,确保河道内所有位置都在无人机的巡检范围内。无人机在飞行时,会根据预设的重叠率(如20%或10%)计算和调整相机的变焦倍数,当实时计算出的重叠率在设定区间以外时,调整无人机的相机变焦倍数,使当前的重叠率在预设值,一般的,重叠率区间可设置为(重叠率-重叠率x50%)至(重叠率+重叠率x50%),所述航线任务执行时还包括在河岸变宽或变窄时进行自动变焦:
34、最边缘两侧无人机河道河岸线距离无人机画面最近边缘的像素宽度,即河道河岸线外区域的像素宽度;
35、最边缘两侧无人机河道河岸线距离无人机画面几何中心的像素宽度为;
36、无人机云台相机画面像素宽度;
37、则、和的关系为:
38、(3);
39、两架相邻无人机的画面的重叠率的计算公式为:
40、(4);
41、若河道河岸线宽度变化,则随之变化,预设重叠率阈值,当重叠率大于重叠率阈值时,无人机进行自动变焦,新的放大倍数f为:
42、(5);
43、公式(5)中,f’为河道河岸线宽度变化的放大倍数,为河道河岸线宽度变化前的像素宽度的值,为河道河岸线宽度变化后的像素宽度值。
44、本发明还包括一种基于预定航线和自主控制的无人机机群河道智能巡检系统,包括
45、无人机机群:包含多架协同飞行的无人机;共同执行任务。
46、云台相机:安装于无人机上,具备变焦功能,用于拍摄河道河岸的景象;
47、人工智能模块:集成人工智能图像分割算法,实现对河道河岸的实时检测和识别;
48、视频处理硬件:设计用于处理无人机的视频流,支持实时的分割模型推理运算;
49、车载机巢:配备电池更换设施,允许无人机自动降落并进行电池更换;
50、控制与通信系统:负责航线规划、无人机操控、视频数据传输以及接收人工智能识别结果。
51、在本发明的另一个方面当中,还提供了一种机器可读存储介质,其存储有可执行指令,所述指令当被执行时使得所述机器执行如上所述的一种基于预定航线和自主控制的无人机机群河道智能巡检方法。
52、与现有技术相比,本发明的有益效果为:
53、(1)本发明提供的一种基于预定航线和自主控制的无人机机群河道智能巡检方法、系统及计算机可读存储介质,在短时间内实现河道精细巡检,解决了单架无人机常规河道巡检不够精细的问题,解决了无人机在精细巡检时不能同时获取河道全貌和河道整体信息的问题,填补了无人机多次巡检的漏洞和死角。只需要一次巡检,既能够完成常规河道巡检的全貌信息,也能够完成河道的精细化巡检。
54、(2)本发明提供的一种基于预定航线和自主控制的无人机机群河道智能巡检方法、系统及计算机可读存储介质,通过人工智能算法,自动识别河道河岸,在遇到河道隐患目标时,自动悬停,变焦放大拍照取证,然后继续巡检;能够通过对河岸的识别自动调整无人机的变焦,使其整个河道和河岸在无人机相机视野内,在精细巡检的同时,也能保证河道河岸全貌的常规巡检。
- 还没有人留言评论。精彩留言会获得点赞!