逼近受干扰参数的确定方法、装置、介质及电子设备与流程
本技术涉及机器人控制领域,具体而言,涉及一种逼近受干扰参数的确定方法、装置、计算机可读介质及电子设备。
背景技术:
1、目前,在机器人控制领域,解决模型未知参数的主要方法是根据输入-输出数据对建立数据集来进行参数辨识。
2、然而,在没有足够大的数据集的情况下,利用数据对进行参数辨识的准确度会较低,而且进行参数辨识需要操作人员熟练掌握系统建模方法,对机器人进行控制的门槛高;此外,当需要在作业过程中需要增加机械部件时,往往需要重新设计参数辨识方案,参数辨识方案的普遍适用性较差。
技术实现思路
1、本技术的实施例提供了一种逼近受干扰参数的确定方法、装置、计算机可读介质及电子设备,进而至少在一定程度上可以在提高机器人控制精度的同时,降低机器人控制的门槛。
2、本技术的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本技术的实践而习得。
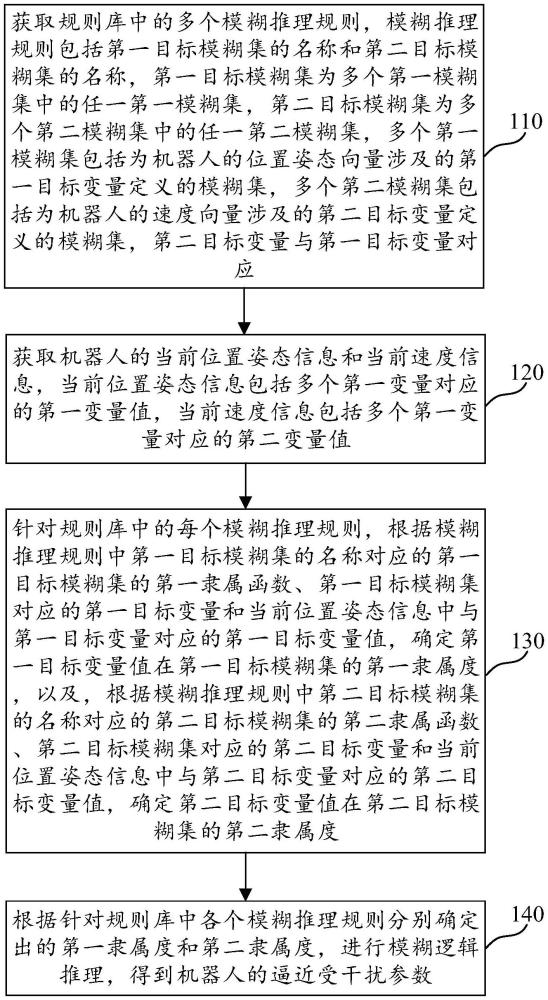
3、根据本技术实施例的一个方面,提供了一种逼近受干扰参数的确定方法,所述方法包括:获取规则库中的多个模糊推理规则,所述模糊推理规则包括第一目标模糊集的名称和第二目标模糊集的名称,所述第一目标模糊集为多个第一模糊集中的任一第一模糊集,所述第二目标模糊集为多个第二模糊集中的任一第二模糊集,所述多个第一模糊集包括为机器人的位置姿态向量涉及的第一目标变量定义的模糊集,所述多个第二模糊集包括为所述机器人的速度向量涉及的第二目标变量定义的模糊集,所述第二目标变量与所述第一目标变量对应;获取所述机器人的当前位置姿态信息和当前速度信息,所述当前位置姿态信息包括多个第一变量对应的第一变量值,所述当前速度信息包括多个第一变量对应的第二变量值;针对所述规则库中的每个模糊推理规则,根据所述模糊推理规则中第一目标模糊集的名称对应的所述第一目标模糊集的第一隶属函数、所述第一目标模糊集对应的所述第一目标变量和所述当前位置姿态信息中与所述第一目标变量对应的第一目标变量值,确定所述第一目标变量值在所述第一目标模糊集的第一隶属度,以及,根据所述模糊推理规则中第二目标模糊集的名称对应的所述第二目标模糊集的第二隶属函数、所述第二目标模糊集对应的所述第二目标变量和所述当前位置姿态信息中与所述第二目标变量对应的第二目标变量值,确定所述第二目标变量值在所述第二目标模糊集的第二隶属度;根据针对所述规则库中各个模糊推理规则分别确定出的第一隶属度和第二隶属度,进行模糊逻辑推理,得到所述机器人的逼近受干扰参数。
4、根据本技术实施例的一个方面,提供了一种逼近受干扰参数的确定装置,所述装置包括:第一获取单元,用于获取规则库中的多个模糊推理规则,所述模糊推理规则包括第一目标模糊集的名称和第二目标模糊集的名称,所述第一目标模糊集为多个第一模糊集中的任一第一模糊集,所述第二目标模糊集为多个第二模糊集中的任一第二模糊集,所述多个第一模糊集包括为机器人的位置姿态向量涉及的第一目标变量定义的模糊集,所述多个第二模糊集包括为所述机器人的速度向量涉及的第二目标变量定义的模糊集,所述第二目标变量与所述第一目标变量对应;第二获取单元,用于获取所述机器人的当前位置姿态信息和当前速度信息,所述当前位置姿态信息包括多个第一变量对应的第一变量值,所述当前速度信息包括多个第一变量对应的第二变量值;隶属度确定单元,用于针对所述规则库中的每个模糊推理规则,根据所述模糊推理规则中第一目标模糊集的名称对应的所述第一目标模糊集的第一隶属函数、所述第一目标模糊集对应的所述第一目标变量和所述当前位置姿态信息中与所述第一目标变量对应的第一目标变量值,确定所述第一目标变量值在所述第一目标模糊集的第一隶属度,以及,根据所述模糊推理规则中第二目标模糊集的名称对应的所述第二目标模糊集的第二隶属函数、所述第二目标模糊集对应的所述第二目标变量和所述当前位置姿态信息中与所述第二目标变量对应的第二目标变量值,确定所述第二目标变量值在所述第二目标模糊集的第二隶属度;模糊逻辑推理单元,用于根据针对所述规则库中各个模糊推理规则分别确定出的第一隶属度和第二隶属度,进行模糊逻辑推理,得到所述机器人的逼近受干扰参数。
5、可选地,基于前述方案,所述当前位置姿态信息为当前位置姿态向量,所述当前速度信息为当前速度向量,所述第一目标变量值在所述当前位置姿态向量中的索引与所述第二目标变量值在所述当前速度向量中的索引相同。
6、可选地,基于前述方案,所述第一获取单元配置为:获取所述规则库中的多组模糊推理规则,每组模糊推理规则包括多个推理模糊推理规则,每组模糊推理规则与一个目标变量对对应,所述目标变量对中的两个变量为所述位置姿态向量和所述速度向量中相同索引对应的变量;所述隶属度确定单元配置为:针对所述规则库中的每组模糊推理规则中的每个模糊推理规则,根据所述模糊推理规则中第一目标模糊集的名称对应的所述第一目标模糊集的第一隶属函数、所述第一目标模糊集对应的所述第一目标变量和所述当前位置姿态信息中与所述第一目标变量对应的第一目标变量值,确定所述第一目标变量值在所述第一目标模糊集的第一隶属度,以及,根据所述模糊推理规则中第二目标模糊集的名称对应的所述第二目标模糊集的第二隶属函数、所述第二目标模糊集对应的所述第二目标变量和所述当前位置姿态信息中与所述第二目标变量对应的第二目标变量值,确定所述第二目标变量值在所述第二目标模糊集的第二隶属度;所述模糊逻辑推理单元配置为:针对所述规则库中的每组模糊推理规则,根据针对该组模糊推理规则中各个模糊推理规则分别确定出的第一隶属度和第二隶属度,进行模糊逻辑推理,得到所述机器人受到的干扰力及干扰力向量的与该组模糊推理规则对应的一个分量的逼近参数;根据所述机器人受到的干扰力及干扰力向量的各个分量的逼近参数,构造出所述机器人受到的干扰力及干扰力向量。
7、可选地,基于前述方案,所述装置还包括控制单元;在构造出所述机器人受到的干扰力及干扰力向量之后,所述控制单元用于:根据所述机器人受到的干扰力及干扰力向量,对所述机器人进行控制。
8、可选地,基于前述方案,所述控制单元配置为:对所述当前速度向量求导,得到所述当前速度向量的导数;根据所述当前速度向量的导数、所述机器人受到的干扰力及干扰力向量、所述机器人的系统惯性矩阵,确定需对所述机器人的控制输出的力和力矩;根据需对所述机器人的控制输出的力和力矩,对所述机器人进行控制。
9、可选地,基于前述方案,所述第一模糊集用于描述所述位置姿态向量中变量值与期望轨迹定义的相应变量值的偏离程度,所述第二模糊集用于描述所述速度向量中变量值与期望速度向量中相应变量值的偏离程度。
10、可选地,基于前述方案,所述模糊逻辑推理单元配置为:针对每个模糊推理规则,根据针对所述模糊推理规则确定出的第一隶属度和第二隶属度进行模糊逻辑推理,得到对所述模糊推理规则的推理结果;根据对各模糊推理规则的推理结果进行并运算,得到模糊输出结果;对所述模糊输出结果进行解模糊操作,得到所述机器人的逼近受干扰参数。
11、根据本技术实施例的一个方面,提供了一种计算机可读介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述实施例中所述的逼近受干扰参数的确定方法。
12、根据本技术实施例的一个方面,提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如上述实施例中所述的逼近受干扰参数的确定方法。
13、根据本技术实施例的一个方面,提供了一种计算机程序产品,所述计算机程序产品包括计算机指令,所述计算机指令存储在计算机可读存储介质中,计算机设备的处理器从所述计算机可读存储介质读取所述计算机指令,所述处理器执行所述计算机指令,使得所述计算机设备执行如上述实施例中所述的逼近受干扰参数的确定方法。
14、在本技术的一些实施例所提供的技术方案中,先获取规则库中的多个模糊推理规则,模糊推理规则包括第一目标模糊集的名称和第二目标模糊集的名称,而且第一目标模糊集为多个第一模糊集中的任一第一模糊集,第二目标模糊集为多个第二模糊集中的任一第二模糊集,多个第一模糊集是为机器人的位置姿态向量涉及的第一目标变量定义的模糊集,多个第二模糊集包括为所述机器人的速度向量涉及的第二目标变量定义的模糊集,并且第二目标变量是与第一目标变量对应的;然后获取机器人的当前位置姿态信息和当前速度信息,并针对每个模糊推理规则,一方面,根据模糊推理规则中第一目标模糊集的名称对应的第一目标模糊集的第一隶属函数、第一目标模糊集对应的所述第一目标变量和当前位置姿态信息中与第一目标变量对应的第一目标变量值,确定该第一目标变量值在第一目标模糊集的第一隶属度,另一方面,还根据模糊推理规则中第二目标模糊集的名称对应的第二目标模糊集的第二隶属函数、第二目标模糊集对应的第二目标变量和当前位置姿态信息中与第二目标变量对应的第二目标变量值,确定该第二目标变量值在第二目标模糊集的第二隶属度;最后,根据针对规则库中各个模糊推理规则分别确定出的第一隶属度和第二隶属度,进行模糊逻辑推理,从而得到的机器人的逼近受干扰参数。
15、由此可见,本技术实施例的方案首次将专家经验直接用于逼近受干扰参数的确定流程中,提高了确定逼近受干扰参数的准确性,可以降低系统误差,提高对机器人的运动控制性能;由于本技术实施例方案是通过对常规操作进行归纳总结,从而利用相关操作信息对机器人的黑盒系统参数进行逼近的,即使对系统建模方法不熟悉的操作人员也可以采用不精确的模糊语言对系统进行描述,因此,显著降低了对机器人进行控制的门槛;此外,本技术实施例方案还可以适用于其他各种具备相似常规操作的机器人的控制,当由于工作需要增加机械部件时,仍然可以基于本技术实施例的方案进行参数逼近,能够适应模型参数的变化,具备较强的普遍适用性。
16、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!