变电站自主无人机安全飞行控制方法与流程
本发明涉及无人机巡检,具体涉及一种变电站自主无人机安全飞行控制方法。
背景技术:
1、现如今,随着信息时代的进一步发展,人们对于电力电子的需求及依赖日益增大,而电网变电站作为电力系统的核心节点,其负责电能的转换、控制和分配,是保证电力系统稳定运行的核心环节,也是保证人们能够正常用电的重要前提。在传统上,电网维护人员对于变电站的巡检常用人工巡检,这不仅耗时费力,而且在某些极端环境下会存在不少的安全隐患。随着这几年无人机技术的突飞猛进发展,因其高效、灵活且成本低等特点,电网工程师逐渐将无人机巡检变为变电站巡检的主要方式之一。然而,在无人机巡检作业时候,其存在飞行安全以及故障诊断两大重要问题亟待解决,这些直接影响到巡检任务的成功与否。
2、传统上,无人机的安全飞行控制技术主要是利用gps导航、视觉导航、惯性导航等方式,利用这些技术,可以做到无人机的定位、避障以及路径规划等功能。但这些方法在实际运用中会存在各自的不足,例如gps导航,还在某些信号差的区域受到限制,导致定位不足甚至丢失信号,以致安全隐患发生。同样的,惯性导航会因为传感器的误差积累,在长期的作业中产生严重偏移。因此,如何提高无人机的安全飞行控制能力是一个重要的问题。
3、现有的故障检测技术主要有基于规则的检测、机器学习算法、统计分析方法等。这些方法各自都会在一定程度上检测到系统的异常状态。但是统计分析方法需要大量的有效数据支持,而在实际中,大量的数据获取是有一个极大的成本问题,而筛选出有效的数据又是一个很大的技术问题;同时,机器学习算法,需要大量的标注好的数据才可以进行模型训练,对于有稀疏性和多样性的异常数据,其处理能力有很有限。这些问题无不制约了现今的故障检测技术在无人机巡检中的应用。
技术实现思路
1、为解决上述技术问题,本发明提供一种变电站自主无人机安全飞行控制方法,其利用控制障碍函数(cbf)和控制lyapunov函数(clf)相结合的方法确保无人机在复杂的变电站巡检作业时的安全飞行;同时,利用孤立森林异常检测算法,在无人机飞行作业时候,有效识别异常飞行状态,实现故障诊断和预警。
2、为解决上述技术问题,本发明采用如下技术方案:
3、一种变电站自主无人机安全飞行控制方法,包括以下步骤:
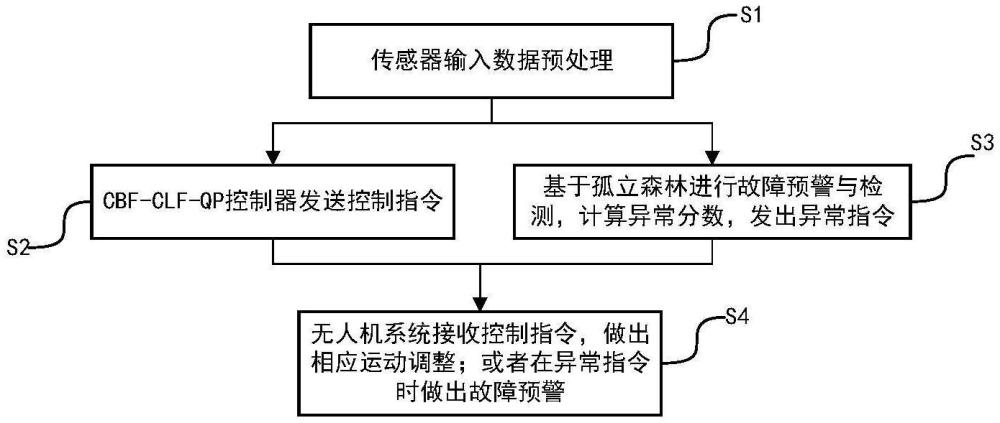
4、s1,通过无人机装配的传感器采集无人机的飞行数据,对所述飞行数据进行预处理,得到预处理后的飞行数据;
5、s2,构建控制障碍函数和控制lyapunov函数,并基于控制障碍函数和控制lyapunov函数构建cbf-clf-qp控制器,将预处理后的飞行数据输入cbf-clf-qp控制器,发出控制指令;执行步骤s4;
6、s3,在无人机巡检作业时候,对实时采集的飞行数据构建孤立树,计算异常分数,根据设定的阈值判断飞行数据是否异常,并发出异常指令;执行步骤s4;
7、s4、无人机系统接收控制指令后,依据控制指令进行相应的运动调整;或者在无人机系统接收到异常指令时做出故障预警。
8、进一步地,所述飞行数据包括通过激光雷达采集的点云数据、通过视觉相机采集的图像数据、通过惯性传感器单元采集的加速度及角速度数据,以及通过惯性导航传感器采集的位置数据。
9、进一步地,对飞行数据进行预处理包括数据清洗和归一化;
10、数据清洗用于去除飞行数据中的噪声或修正飞行数据中的缺失值和异常值;
11、通过min-max归一化法,将飞行数据缩放到区间[0,1]:
12、
13、zi表示归一化前的飞行数据,zi′表示归一化后的飞行数据。
14、进一步地,步骤s2中,构建控制障碍函数的过程,具体包括:
15、首先描述非线性四旋翼无人机控制系统的控制仿射形式如下:
16、
17、其中,f,g分别表示为无人机控制系统的漂移向量场和控制向量场,u是无人机控制系统的控制输入,x是无人机控制系统的状态变量;
18、无人机控制系统的安全集定义为超水平集
19、
20、其中,表示超水平集的内部,表示n维实向量,h(x)是连续可微的超水平集的期望约束,也称为障碍函数;
21、设h(x)是一个局部利普希茨的连续可微函数,同时,假定存在一个κ类函数σ(h(x))和控制规律函数kcbf;
22、kcbf(x)={u∈u:lfh(x)+lgh(x)u+σ(h(x))≥0};
23、u表示控制输入集合;lf和lg是h(x)的李导数,分别为和
24、那么,所述控制规律函数kcbf(x)即为无人机控制系统的控制障碍函数。
25、进一步地,步骤s2中,构建控制lyapunov函数的过程,具体包括:
26、设v(x)是一个局部利普希茨连续的可微函数,同时,假定存在一个k类函数和控制规律函数kclf:
27、
28、则v(x)为无人机控制系统的控制lyapunov函数,也是一个正定函数,满足:对于所有x≠xd,v(xd)=0且v(x)>0,xd为目标状态。
29、进一步地,步骤s2中,所述构建基于控制障碍函数和控制lyapunov函数的cbf-clf-qp控制器,具体包括:
30、通过设置不同优先级的方式结合控制障碍函数和控制lyapunov函数,生成一个cbf-clf-qp控制器,具体包括:
31、将兼顾无人机安全性和稳定性的控制问题构建为二次规划问题,二次规划问题目标函数为:
32、
33、其中,为cbf-clf-qp控制器生成的最优控制输入,上标t表示转置;
34、约束条件包括:
35、控制障碍函数约束:lfh(x)+lgh(x)u≥-σ(h(x));
36、控制lyapunov函数约束:
37、其中,δ为松弛变量,h为任意正定矩阵,p表示无人机位置,同时p>0,以此保证所述二次规划问题存在可解性;
38、将cbf-clf-qp控制器生成的最优控制输入作为控制指令,发送给无人机系统。
39、进一步地,步骤s3具体包括:
40、首先,基于预处理后的飞行数据构建孤立树:将飞行数据表示为一个时间序列矩阵y:
41、
42、其中,yij表示x中的元素,i时间同步数,j为特征维度;时间序列矩阵y的一行表示一个时间步内的飞行数据,每一列表示一个特征;
43、在孤立树的每个节点,随机选择一个特征,并在所选特征的最大值和最小值的区间里面随机的选择一个分割值δ;根据分割值p将飞行数据样本分到两个子集中;对于每个子集重复进行分割过程,直到孤立树的每个叶节点包含的飞行数据样本的数目小于预设阈值或树的深度达到最大值;
44、其次,进行异常分数的计算:计算飞行数据样本y在决策树中的路径长度d(y);路径长度越短,飞行数据样本y异常的可能性越高;将多个孤立树的平均路径长度作为飞行数据样本的异常分数s(y,n):
45、
46、其中n为样本数量,表示孤立树的平均路径长,c(n)为一种惩罚项,用于归一化路径长度:
47、
48、其中h(·)为调和数;
49、最后,进行阈值的设定并进行飞行数据样本的异常判断:设定阈值θ,判断飞行数据样本的异常分数s(y)是否大于θ,如是,则所述飞行数据样本被标记为异常,如否,则所述飞行数据样本为正常。
50、与现有技术相比,本发明的有益技术效果是:
51、(1)cbf-clf-qp控制器设计:本发明针对无人机变电站安全飞行巡检作业设计了一种创新的cbf-clf-qp控制器,结合了控制障碍函数(cbf)和控制lyapunov函数(clf),通过二次规划(qp)方法优化控制输入。这种设计不仅确保了无人机在复杂环境中的安全性,还提高了飞行稳定性。
52、(2)isolation forest算法应用:将isolation forest算法应用于无人机的实时故障检测与预警中,突破了传统方法对大量标注数据的依赖。通过这种无监督学习方法,系统能够有效识别飞行中的异常状态,并提供及时的预警和应对措施。
53、(3)综合数据预处理和异常检测:本发明在数据预处理阶段进行了详细设计,包括数据清洗、特征提取和归一化,确保了传感器数据的质量。结合isolation forest进行实时监测,提高了故障检测的准确性和效率。
- 还没有人留言评论。精彩留言会获得点赞!