一种基于仿生成长优化过程的无人机路径优化方法
本发明涉及无人机的智能化避障,具体涉及一种基于仿生成长优化过程的无人机路径优化方法。该包括但不限于人工智能、机器学习、认知计算、机器人自主导航、以及无人机的感知与决策系统。具体来说,本发明结合了人类行为学、神经科学和机器人工程,旨在提升无人机在复杂环境中的自主避障能力和任务执行效率。
背景技术:
1、无人机在现代军事和民用领域得到广泛应用,包括但不限于侦察、监视、物流、农业和搜索救援等任务。然而,无人机在执行任务时面临复杂多变的环境,如何有效避免碰撞、规划最优路径成为关键技术问题。
2、传统路径规划方法,如基于几何的方法、图搜索算法等,通常依赖于环境的先验知识,且在动态环境中的适应性较差。随着人工智能技术的发展,基于机器学习的路径规划方法逐渐成为研究热点,这些方法能够通过学习历史数据来优化路径规划。
3、然而,现有技术在模拟人类大脑处理复杂环境的能力方面仍存在局限。人类在成长过程中,通过感知、学习、记忆和决策等认知功能,逐渐形成对复杂环境的适应能力。
技术实现思路
1、针对现有技术方法存在的不足,本发明提出一种创新的基于仿生成长优化过程的无人机路径优化方法,具体包括下列步骤:
2、步骤一:无人机感知模型建立;
3、无人机被假设为具有一定感知半径,感知范围为球形区域,无人机能够在这个范围内识别所有障碍信息;
4、任务初始阶段无人机需要感知周围的障碍信息以及自身状态信息,无人机感知模型为:假设无人机的感知范围是以自身为原点在立体坐标系下的球形区域,其中立体坐标系的x轴为地理坐标轴的朝北方向,y轴为地理坐标轴的朝东方向,z轴为朝上方向,定义无人机的感知半径为dsafe,无人机当前在空间中的位置为[xuav,yuav,zuav],无人机能够感知到半径区域dsafe内的所有障碍信息[xo,yo,zo]为:
5、
6、步骤二:无人机控制模型建立;
7、假设无人机在空中飞行时只需考虑二维平面内的障碍;无人机能够选择八个基本方向进行飞行动作,形成避障策略的安全路径;
8、假设无人机在空中飞行时,从无人机当前所处高度截取水平面,无人机仅需要避开二维平面中的所有障碍即能完成安全飞行;假设无人机为质点控制模型,在每次飞行方向选择时,无人机的飞行动作行为act共有8个方向能够进行选择:
9、act={ul,u,ur,l,r,dl,d,dr} (2)
10、其中:ul,u,ur,l,r,dl,d,dr分别为表示以当前无人机为原点在二维平面上的8个方向,即左上、上、右上、左、右、左下、下、右下;
11、在无人机的飞行过程中,通过将这些基本飞行动作的序列组合起来,获得一套避障策略的安全路径;即,无人机防碰撞策略获得的安全飞行路径是无人机的飞行动作行为act在时间轴上的序列a:
12、a={act1,act2,...,actn} (3)
13、其中:act1,act2,...,actn为在时间轴的1到n时刻上所采取的无人机飞行动作;
14、在规划好无人机的路径之后,无人机需要按照既定轨迹进行飞行;
15、步骤三:基于仿生成长优化过程的无人机路径规划;
16、具体如下:
17、step 1:无人机路径规划;
18、假设无人机在飞行过程中实时感知到周围的障碍信息为静态障碍的最近坐标点so=[xso,yso,zso]与动态障碍的最近坐标点mo=[xmo,ymo,zmo],假设无人机执行任务的目标坐标点为ptar=[xp,yp,zp],则定义人工势场的目标吸引力ua与障碍排斥力ur分别为:
19、ua=-ka·[(xp-xuav)2+(yp-yuav)2+(zp-zuav)2] (4)
20、
21、其中:ka为目标吸引力的权值系数,kr1和kr2分别为静态障碍so与动态障碍mo排斥力权值系数,σr1和σr2分别为静态障碍so与动态障碍mo的排斥系数,exp为幂函数;
22、设定||ptar-[xuav,yuav,zuav]||=[(xp-xuav)2+(yp-yuav)2+(zp-zuav)2],||mo-[xuav,yuav,zuav]||=[(xmo-xuav)2+(ymo-yuav)2+(zmo-zuav)2],||so-[xuav,yuav,zuav]||=[(xso-xuav)2+(yso-yuav)2+(zso-zuav)2],由此计算出势场的吸引力梯度与排斥力梯度函数分别为:
23、
24、其中:表示梯度符号;
25、由此得到控制无人机的导航向量为势场梯度的函数之和:
26、
27、其中:i为无人机感知区域范围内的障碍个数,表示对无人机感知范围内所有排斥力梯度函数进行叠加求和,为第i个障碍的排斥力梯度函数;
28、在前面所计算的引力梯度函数与斥力梯度函数的基础上,根据步骤一得出时间轴上的动作序列a,无人机根据动作序列a执行飞行动作,则可以得出在障碍环境中的防碰撞策略l。
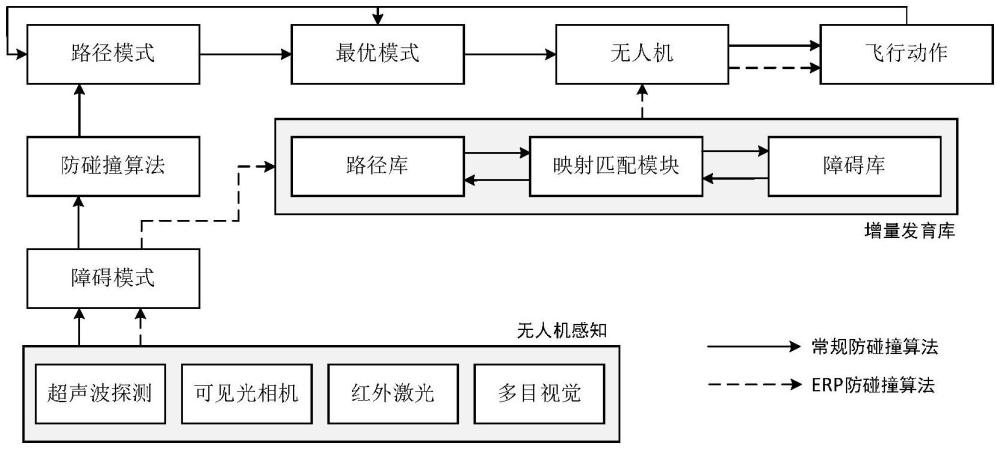
29、step 2:障碍模式与防碰撞策略映射匹配;
30、无人机在构建传统防碰撞算法中的映射关系时,障碍模式与防碰撞策略之间存在一对一的映射关系;对于任何障碍模式ms=[so,mo],都有一种独特的防碰撞策略l;
31、无人机初始在障碍环境中进行路径规划,由于对环境障碍信息的不熟悉,采用“发现障碍——算法计算——合理规避”的防碰撞路径规划算法,此时能够根据路径代价函数挑选最优的路径,无人机按照路径进行飞行;
32、当无人机在环境中不断训练,得到多种障碍模式ms和防碰撞策略的映射关系知识积累后,采用“发现障碍——合理规避”的方法,直接快速得到安全路径l,从而控制无人机的飞行,具体如下:
33、在无人机的感知范围内,“发现障碍——合理规避”的方式是一个匹配选择机制,根据威胁模式ms=[so,mo],通过映射关系f,在之前所选择的防碰撞策略l基础之上,根据当前障碍模式ms所得出的较为优化的路径l';
34、l'=f(ms,l,kb(ms),kb(l),kb(f)),ms∈ω,l∈ω (9)
35、其中:kb(ms),kb(l),kb(f)分别表示障碍模式知识库、防碰撞策略知识库,以及映射关系知识库,为无人机在环境中不断训练过程中所得到多种障碍模式、防碰撞策略以及两者之间映射关系的逐渐积累记录过程,ω表示无人知范围,f(·)表示映射关系;
36、当知识库丰富到一定程度,当前无人机有较大几率能够遇见与威胁模式知识库中的威胁模式ms相同或者相似的威胁模式ms′,则能够不通过长时间的算法计算,而是直接根据当前障碍模式ms所得出的较为优化的路径l',即式(9)所示的“发现障碍——合理规避”的方法,直接通过映射生成防碰撞策略,即安全飞行的路径;
37、step 3:仿生成长优化路径认知发育;
38、引入一个反馈机制,以逐步扩展无人机的知识库,具体如下:
39、式(10)所示为仿生成长优化路径发育的数学模型,无人机根据当前威胁模式ms,通过映射关系f,在之前所选择的安全路径l基础上得到较为优化的路径l',在此过程中,每次将新的威胁模式增量δkbn(ms)、路径增量δkbn(l)、以及映射关系增量δkbn(f)分别增量式地添加到知识库kbn(ms),kbn(l),kbn(f)中,从而扩充为更为丰富的知识库kbn+1(ms),kbn+1(l),kbn+1(f)
40、
41、其中:l'根据当前障碍模式ms所得出的较为优化的路径,kbn(ms),kbn(l),kbn(f)分别表示障碍模式知识库增量、防碰撞策略知识库增量,以及映射关系知识库增量,δkbn(ms),δkbn(l),δkbn(f)分别表示当前的威胁模式增量、路径增量以及映射关系增量;在增量的扩充之下,知识库进行逐次更新进行丰富,得到kbn+1(ms),kbn+1(l),kbn+1(f)。
42、在本发明一个实施例的步骤三step2中,无人机在障碍环境中,当前面对的威胁模式为ms=[so,mo],此时无人机通过step1的无人机路径规划方法,计算得出防碰撞策略l,则威胁模式ms与安全路径l之间形成映射关系f(·);分别将障碍模式、防碰撞策略l以及映射关系f(·)存储到所对应的障碍模式知识库kb(ms)、防碰撞策略知识库kb(l),以及映射关系知识库kb(f)中,在障碍环境中不断重复上述步骤,则可以不断增量式地丰富三种知识库,逐渐积累三种关系知识
43、本发明基于仿生成长优化过程,模仿人类大脑事件相关电位(erp)环路的发育模式,以实现无人机在复杂环境中的高效和智能导航。
44、为解决现有技术中的局限性,本发明通过无人机感知模型建立、无人机控制模型建立,以及基于仿生成长优化过程的无人机路径规划,这三个关键技术步骤实现:
45、这些步骤共同构成了本发明的核心,旨在通过模拟人类大脑的发育模式,提升无人机在复杂环境中的自主避障能力和任务执行效率。与现有技术相比,本发明的无人机路径优化方法具有更高的智能性、适应性和效率,能够显著提升无人机在复杂环境中的作业能力。
- 还没有人留言评论。精彩留言会获得点赞!