基于加速度计的水位线清洁方法、机器人、设备及介质与流程
本发明涉及机器人,尤其涉及基于加速度计的水位线清洁方法、机器人、设备及介质。
背景技术:
1、泳池机器人是用于清洁泳池的一种设备,如清洁泳池底部和泳池墙壁,由于泳池机器人需要在水下作业,因此无法长期暴露在空气中,否则会导致空气进入机器人内部,使得机器人漂浮在水面上。而泳池的水位线是水面和空气的分界线,常规的机器人在清洁水位线附近的区域时,经常会出现机器人离水位线太远,导致清洁不完整,或者长时间超过水位线,导致机器人内部进入空气。
技术实现思路
1、有鉴于此,本发明的目的是为了克服现有技术中的不足,提供一种基于加速度计的水位线清洁方法、机器人、设备及介质,该方法通过获取机器人的实时加速度分量,并通过多种判断条件对实时加速度分量进行判断,从而快速确定机器人是否越过水位线。
2、本发明提供如下技术方案:
3、第一方面,本技术提供了基于加速度计的水位线清洁方法,包括:
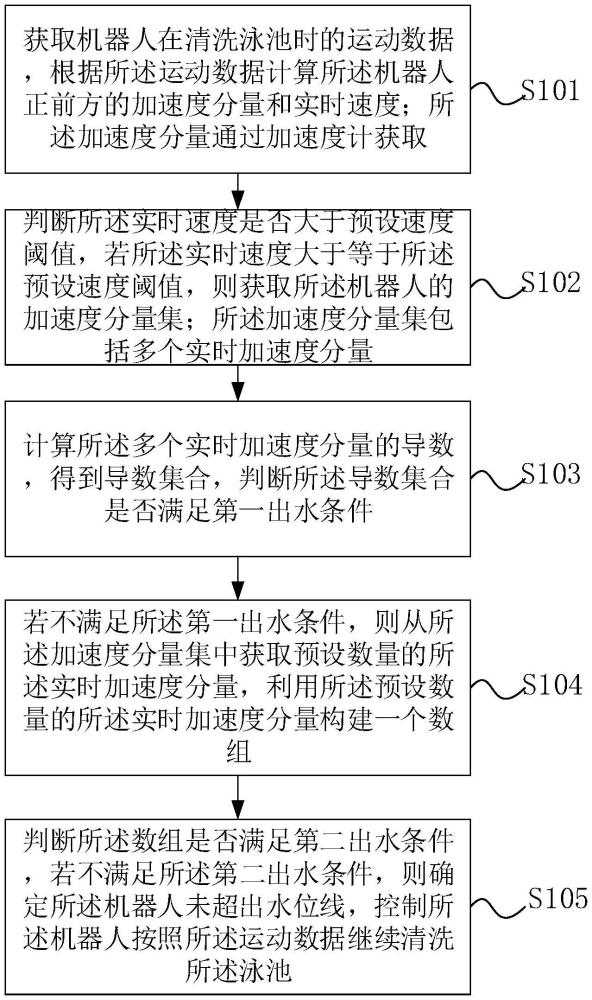
4、获取机器人在清洗泳池时的运动数据,根据所述运动数据计算所述机器人正前方的加速度分量和实时速度;所述加速度分量通过加速度计获取;
5、判断所述实时速度是否大于预设速度阈值,若所述实时速度大于等于所述预设速度阈值,则获取所述机器人的加速度分量集;所述加速度分量集包括多个实时加速度分量;
6、计算所述多个实时加速度分量的导数,得到导数集合,判断所述导数集合是否满足第一出水条件;
7、若不满足所述第一出水条件,则从所述加速度分量集中获取预设数量的实时加速度分量,利用所述预设数量的实时加速度分量构建一个数组;
8、判断所述数组是否满足第二出水条件,若不满足所述第二出水条件,则确定所述机器人未超出水位线,控制所述机器人按照所述运动数据继续清洗所述泳池。
9、一种实施方式中,所述判断所述导数集合是否满足第一出水条件,包括:
10、获取所述导数集合中的极大值和极小值,根据所述极大值和所述极小值,计算所述机器人的加速度波动值;
11、判断所述加速度波动值是否大于等于加速度出水瞬间检测波动值;所述加速度出水瞬间检测波动值,是所述机器人离开所述水位线瞬间产生的波动值;
12、若所述加速度波动值大于等于加速度出水瞬间检测波动值,则确定所述求导结果满足所述第一出水条件。
13、一种实施方式中,所述从所述加速度分量集中获取预设数量的所述实时加速度分量,利用所述预设数量的所述实时加速度分量构建一个数组,包括:
14、对所述加速度分量集中的所述加速度分量进行从大到小排序,得到新数据集;
15、确定所述机器人的加速度计的安装方向,若所述的加速度计的安装方向向上,则从所述新数据集中,在新数据末端获取所述预设数量的第一目标数据,利用所述第一目标数据构建第一数组;
16、若所述机器人的加速度计的安装方向向下,则从所述新数据集中,在新数据前端获取所述预设数量的第二目标数据,利用所述第二目标数据构建第二数组。
17、一种实施方式中,所述判断所述数组是否满足第二出水条件,包括:
18、若所述加速度计的安装方向向上,则将所述第一数组中的每个所述第一目标数据,分别与水位线反推加速度预判值进行对比;
19、若所有的所述第一目标数据均小于所述水位线反推加速度预判值,则确定所述第一数组满足所述第二出水条件。
20、一种实施方式中,所述判断所述数组是否满足第二出水条件,还包括:
21、若所述加速度计的安装方向向下,则将所述第二数组中的每个所述第二目标数据,分别与水位线反推加速度预判值进行对比;
22、若所有的所述第二目标数据均大于所述水位线反推加速度预判值,则确定所述第二数组满足所述第二出水条件。
23、一种实施方式中,所述获取机器人的运动数据,包括:
24、连续获取所述机器人的多个俯仰角度,判断每个所述俯仰角度是否均大于等于预设角度;
25、若每个所述俯仰角度均大于等于所述预设角度,则判断每两个连续采集的所述俯仰角度差值的绝对值,是否均小于机器人上墙角度波动值;
26、若均小于所述机器人上墙角度波动值,则确定所述机器人位于泳池墙壁区域,获取所述机器人位于所述泳池墙壁区域的所述运动数据。
27、一种实施方式中,所述获取机器人的运动数据,根据所述运动数据计算所述机器人正前方的加速度分量,包括:
28、若所述机器人位于所述泳池墙壁区域,则获取所述机器人的加速度计实时测量数据和所述俯仰角度;
29、根据所述加速度计实时测量数据和所述俯仰角度,计算所述机器人正前方的加速度分量。
30、一种实施方式中,所述方法还包括:
31、若确定所述机器人位于所述泳池墙壁区域,则控制所述机器人按照所述预设速度阈值运行,并控制所述机器人的pid运动模型的pwm单位周期变化值小于预设变化阈值。
32、一种实施方式中,所述获取所述机器人的加速度分量集,包括:
33、确定所述泳池的泳池材质;所述泳池材质包括瓷砖泳池、水泥泳池和支架泳池;
34、获取所述机器人在不同泳池墙壁的运动采样数据,所述运动采样数据的数量为目标数量;
35、判断所述目标数量的所述运动采样数据,是否满足所述第一出水条件和所述第二出水条件的判断需求;
36、若不满足,则增加所述运动采样数据的数量,直到所述运动采样数据的数量满足所述第一出水条件和所述第二出水条件的判断需求;
37、记录满足所述判断需求时,所述运动数据的最终数量,根据所述最终数量确定所述加速度分量集的构建条件。
38、第二方面,本技术提供了一种机器人,包括:
39、获取模块,用于获取机器人在清洗泳池时的运动数据,根据所述运动数据计算所述机器人正前方的加速度分量和实时速度;所述加速度分量通过加速度计获取;
40、判断模块,用于判断所述实时速度是否大于预设速度阈值,若所述实时速度大于等于所述预设速度阈值,则获取所述机器人的加速度分量集;所述加速度分量集包括多个实时加速度分量;
41、计算模块,用于计算所述多个实时加速度分量的导数,得到导数集合,判断所述导数集合是否满足第一出水条件;
42、构建模块,用于若不满足所述第一出水条件,则从所述加速度分量集中获取预设数量的实时加速度分量,利用所述预设数量的实时加速度分量构建一个数组;
43、控制模块,用于判断所述数组是否满足第二出水条件,若不满足所述第二出水条件,则确定所述机器人未超出水位线,控制所述机器人按照所述运动数据继续清洗所述泳池。
44、第三方面,本技术提供了一种电子设备,包括存储器和至少一个处理器,所述存储器存储有计算机程序,所述处理器用于执行所述计算机程序以实施如第一方面所述的基于加速度计的水位线清洁方法。
45、第四方面,本技术提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被执行时,实现如第一方面所述的基于加速度计的水位线清洁方法。
46、本发明的实施例具有如下有益效果:
47、本发明提供的基于加速度计的水位线清洁方法,通过多个出水判断条件,判断机器人是否超过水位线,若未超过水位线,则控制机器人继续进行清洗,确保靠近水位线的泳池区域也可以得到有效清洗,从而使得机器人的清洗工作更加智能。
48、为使本发明的上述目的、特征和优点能更明显和易懂,下文特举较佳实施例,并配合所附附图,做详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!