一种用于呼吸机的自适应气道压控制方法
本发明属于pid技术优化领域,尤其涉及一种用于呼吸机的自适应气道压控制方法。
背景技术:
1、呼吸机是一种医疗设备,通过提供机械通气来帮助患者进行呼吸,特别适用于呼吸功能不全或呼吸衰竭的患者;它能够精确调节和监测气流、压力和氧气浓度,从而确保患者获得足够的氧气和适当的通气量,以维持正常的血氧水平和二氧化碳排放;在呼吸机中,气道压的调节对患者的治疗尤为重要,气道压是指呼吸机在吸气过程中对患者气道施加的压力,它直接影响到通气效果和患者的舒适度,正确的气道压可以确保患者获得足够的通气量,同时避免气道压力过高或过低对患者造成不适或损伤。
2、pid控制通过比例运算(p)响应当前误差,积分运算(i)累积过去误差,微分运算(d)预测未来误差的变化趋势,从而实现对受控对象的精确控制;然而pid控制的性能高度依赖于控制参数(kp、ki、kd)的选择,传统pid控制依靠工作人员根据系统特性进行反复试验和调饥饿控制参数,过程复杂且耗时;在实际应用中,pid控制根据实时的气道压力传感器反馈,计算出需要调整的压力值,并通过调节呼吸机的气源或阀门等执行部件来实现;尽管pid控制器可以在大多数情况下提供良好的控制效果,但在系统响应速度要求较高的场合(如呼吸机需要快速响应气道压力变化时),传统pid控制可能显得不够迅速。
3、通过智能优化算法优化pid控制参数具有重要的意义和作用,特别是在复杂和高要求的呼吸机气道压控制系统中,智能优化算法能够自动调整pid控制器的参数,提高系统的控制性能和适应性;蛇鹫优化算法(sboa)是一种新型的群体智能优化算法,灵感来源于蛇鹫捕食蛇类的行为;该算法模拟了蛇鹫在捕猎过程中展现出的搜索与攻击行为,具有全局搜索能力强,收敛速度快的特点,但正由于全局搜索能力强,在优化pid控制参数时可能在参数搜索过程中过早地陷入局部最优解,导致无法找到全局最优解,并且sboa的性能对算法参数较为敏感,需要对参数进行适当调整以获得最佳效果。
技术实现思路
1、本发明的目的在于:提出一种用于呼吸机的自适应气道压控制方法,通过改进蛇鹫优化算法,防止算法过早陷入局部最优解,并且降低算法的参数敏感性,提高算法的局部搜索能力,进而优化呼吸机气道压控制系统中的三个pid控制参数,提高pid控制器的控制精度和响应速度,从而加强呼吸机气道压控制系统的性能和鲁棒性。
2、为实现上述目的,本发明采用了如下技术方案:
3、一种用于呼吸机的自适应气道压控制方法,具体步骤如下:
4、步骤一、设计呼吸机气道压控制系统,使用simulink软件搭建呼吸机气道压控制系统仿真模型。
5、步骤二、改进蛇鹫优化算法,使用matlab软件建立改进蛇鹫优化算法数学模型。
6、步骤三、选择合适的目标函数,通过改进蛇鹫优化算法对pid控制参数进行迭代寻优。
7、步骤四、算法迭代结束后,输出三个pid控制最优参数到呼吸机气道压控制系统中,运行呼吸机气道压控制系统仿真模型,验证改进蛇鹫优化算法性能的优越性。
8、进一步地,所述步骤一中,搭建呼吸机气道压控制系统的仿真模型,具体步骤为:
9、s11、为呼吸机气道压控制系统建立仿真模型,将气道压力控制问题转换成数学模型待优化问题,设计传递函数模拟呼吸机工作时气道压控制系统实况,传递函数为:
10、;
11、式中,g为传递函数值,s为拉普拉斯变换后的复频域变量;
12、s12、设计呼吸机气道压控制系统模型,包括:减法器模块,改进蛇鹫优化算法模块,pid控制器模块,受控对象模块,气道压力传感器;
13、s13、设定目标气道压力pref,通过减法器将pref与实时采集到的实际气道压力p(λ)进行作差,求得误差值e(λ);将e(λ)传入pid控制器,改进蛇鹫优化算法模块对pid控制器三个参数进行优化,输出pid调节后的控制量到受控对象模块;受控对象模块模拟气道压控制系统工作实况对控制量进行计算,输出实际气道压力y(λ);气道压力传感器采集到信号,对信号进行计算,输出实际气道压力p(λ)到减法器,完成呼吸机气道压控制系统的闭环控制。
14、进一步地,所述步骤二中,改进蛇鹫优化算法,具体步骤为:
15、s21、引入混沌映射改进算法初始化位置公式,通过结合正弦函数、tent函数和余弦函数,提高了系统的混沌特性,降低了算法的参数敏感度,改进后公式为
16、;(1)
17、;(2)
18、式(1)中,为随机生成的个体位置,和为算法搜索空间上下界,r1为取值在(0,1]之间的随机数;
19、式(2)中,为种群中i个体位置,i = 1,…,n,为混沌映射生成的i+1个体位置,r2为取值在(0,1]之间的随机数,ub和lb的意义同上;
20、s22、融合粒子群算法改进蛇鹫搜寻猎物行为位置更新公式,蛇鹫算法的更新策略更加多样化,提高算法的局部搜索能力,改进后公式为:
21、;(3)
22、式(3)中,为更新后的i个体的位置,为当前迭代中i个体的位置,为蛇鹫搜寻猎物的速度,的计算公式为:
23、;(4)
24、式(4)中,为更新后的蛇鹫速度,为当前迭代中i个体的速度,为当前迭代中最佳个体位置,为全局最佳个体位置,c1、c2为学习因子,r3为取值在(0,1]之间的随机数,w为惯性权重,当算法迭代到中后期,w的值逐渐减小,使个体更新后的位置更加靠近,提高算法的局部搜索能力,并且在w的计算公式中引入适应度,当十分接近的位置,w的值较大,保持蛇鹫个体的独立性,避免算法陷入局部最优解,w的计算公式为:
25、;(5)
26、式(5)中,w为惯性权重,t为当前迭代次数,t为总迭代次数,为i个体的适应度,为的适应度,即最佳适应度;
27、s23、引入正余弦策略改进算法开发阶段位置更新公式,可以利用正弦和余弦函数的周期性特点,使得位置更新过程更加多样化和灵活,帮助算法跳出局部最优解,改进后公式为:
28、;
29、式中,为更新后的i个体的位置,为当前迭代中i个体的位置,为当前迭代中最佳个体位置,rb为取值在(0,dim]之间的随机数,dim为个体搜索空间维度,rd为取值在(0,n]之间的随机整数,k为取值为1或2的随机整数,r、r4、r5为取值在(0,1]之间的随机数,其他参数意义同上。
30、进一步地,所述步骤三中,选择itse作为pid控制器的性能评价指标函数,同时也是改进蛇鹫优化算法的目标函数,itse相比于其他性能指标,对控制系统的超调和振荡更为敏感,这有助于避免过度控制,从而增强呼吸机气道压控制系统的稳定性,防止导致调节气道压力过快,从而威胁到病人生命健康,itse的公式为:
31、;
32、式中,j为itse计算出的适应度值,λ为控制系统运行时间,为误差平方值。
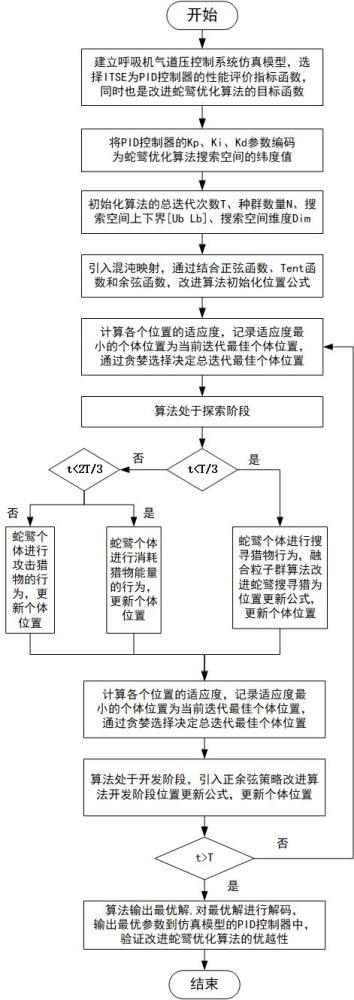
33、进一步地,所述步骤三中,通过改进蛇鹫优化算法对pid控制参数进行迭代寻优,具体步骤为:
34、s31、选择合适的目标函数,初始化算法的总迭代次数t、种群数量n、搜索空间上下界[ub lb]、搜索空间维度dim;
35、s32、将pid控制器的kp、ki、kd参数编码为蛇鹫优化算法搜索空间的纬度值;
36、s32、引入混沌映射,改进算法初始化位置公式,改进后公式同上;
37、s33、计算各个体位置的适应度,记录适应度最小的个体位置为当前迭代最佳个体位置,通过贪婪选择的方式决定全局最佳个体位置,贪婪选择的公式为:
38、;
39、式中,为px个体位置的适应度,为gx个体位置的适应度,其他参数意义同上;
40、s34、算法处于探索阶段,当t<t/3时,算法模拟蛇鹫个体搜寻猎物行为进行位置更新,融合粒子群算法改进蛇鹫搜寻猎物行为位置更新公式同上;
41、s35、当t/3<t<2t/3时,算法模拟蛇鹫个体消耗猎物能量行为进行位置更新,公式为:
42、;
43、式中,为更新后的第i个体位置,为当前迭代第i个体位置,其他参数意义同上;
44、s36、当2t/3<t<t时,算法模拟蛇鹫个体攻击猎物行为进行位置更新,公式为:
45、;
46、式中,为更新后的第i个体位置,为当前迭代i个体位置,rl为莱茵飞行生成的列向量,其他参数意义同上;
47、s37、算法处于开发阶段,引入正余弦策略改进算法开发阶段位置更新公式同上;
48、s38、检查t是否大于总迭代次数t,若是,则算法输出最优解,对最优解进行解码,输出最优参数到仿真模型的pid控制器中,运行仿真模型,若否,则返回s33继续迭代,t和t的意义同上。
49、进一步地,所述步骤四中,输出三个pid控制最优参数到呼吸机气道压控制系统中,运行呼吸机气道压控制系统仿真模型,验证改进蛇鹫优化算法性能的优越性,具体步骤为:
50、s41、对最优解的三个维度值进行解码,传递给气道压pid控制器的kp、 ki、 kd三个参数;
51、s42、运行呼吸机气道压控制系统仿真模型,验证改进蛇鹫优化算法的优越性;
52、s43、将目标函数计算出的适应度值传递给改进蛇鹫优化算法,实现改进蛇鹫优化算法优化呼吸机气道压控制系统pid控制器的完整运行。
53、通过采用上述技术方案,本发明实现了以下有益效果:
54、本发明中提出了一种用于呼吸机的自适应气道压控制方法,本发明首次将改进蛇鹫优化算法算法应用于优化呼吸机气道压控制系统的pid控制器参数,通过引入混沌映射改进算法初始化位置公式,提高了系统的混沌特性,融合粒子群算法改进蛇鹫搜寻猎物行为位置更新公式,提高算法的局部搜索能力,降低了算法的参数敏感度,引入正余弦策略改进算法开发阶段位置更新公式,帮助算法跳出局部最优解,进而优化呼吸机气道压控制系统中的kp、ki、kd控制参数,提高pid控制器的控制精度和响应速度,从而加强呼吸机气道压控制系统的性能和鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!