一种标定方法、域控制器及存储介质与流程
本技术涉及标定,特别涉及一种标定方法、域控制器及存储介质。
背景技术:
1、域控制器是汽车中用于实现高级驾驶辅助系统的核心组件,它通过集成多种传感器、执行器和控制算法,负责处理感知、决策、执行、安全和通信等关键任务。
2、航迹推算是在知道物体当前时刻位置的条件下,通过测量移动的距离和方位,推算下一时刻位置的方法。域控制器的航迹推算算法通过采集车辆轮速脉冲、转角速度、惯性测量单元等数据来实时推算车辆位置。
3、因此,为了准确推算出车辆位置,标定是非常重要的一步;但现有的人工标定方法精确度较低。
技术实现思路
1、本技术为解决上述技术问题,提供一种精确度高,可以减少定位误差的标定方法、域控制器及存储介质。
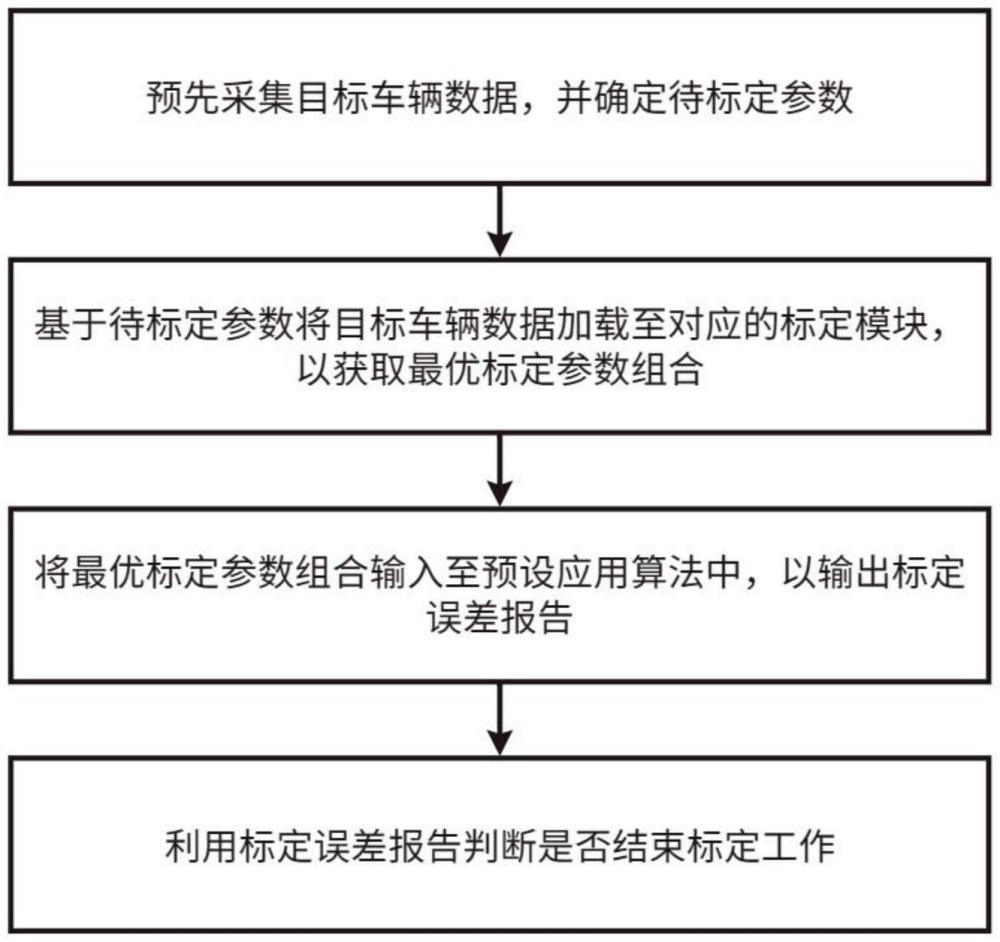
2、具体的,本技术提供一种标定方法,预先采集目标车辆数据,并确定待标定参数;所述标定方法包括以下步骤:
3、基于所述待标定参数将所述目标车辆数据加载至对应的标定模块,以获取最优标定参数组合。
4、将所述最优标定参数组合输入至预设应用算法中,以输出标定误差报告。
5、以及,利用所述标定误差报告判断是否结束标定工作。
6、在上述技术方案中,通过预先采集目标车辆数据,可以确保标定是基于真实可靠的信息,从而提高后续应用时航迹推算的精确度,减小定位误差;输出标定误差报告,灵活判断是否继续或结束标定工作,确保在标定过程中用户可以及时得到反馈并及时调整,进一步提高标定的精确度。
7、进一步的,所述目标车辆数据至少包括车身数据和位置数据;所述标定模块至少包括第一标定模块和第二标定模块。
8、在上述技术方案中,基于车身数据和位置数据提供了车辆的全面信息,充分反映了车辆的动态特性和空间位置信息,确保标定的准确性;通过将标定模块划分为多个不同的模块,可以针对不同的数据类型和处理需求进行专门化的数据处理,提高标定的专注性和准确性。
9、此外,多个标定模块的设计使得标定过程可以并行进行,进而缩短标定的时间,加速开发周期,提高相应速度。
10、需要说明的是,本领域技术人员可以根据不同车型或应用需求,灵活调整和扩展标定模块,以应对新的挑战和变化,提高域控制器的适应性。
11、进一步的,在将目标车辆数据加载至标定模块之前,包括:
12、设定待标定参数的参数上限和参数下限,并设定参数步长,以基于所述参数上限、参数下限和参数步长获得标定参数数列;其中,所述标定参数数列包括多个同一类型的待标定参数。
13、在上述技术方案中,设定参数的上限和下限可以有效地控制待标定参数的范围,从而避免不合理参数的出现,确保标定过程更加安全和有效;通过设定参数步长获得标定参数数列,可以系统化地生成一系列参数,确保这些参数具备一定的规律性,便于后续的优化;基于参数数列的生成,能够快速自动化搜索最优参数组合,减少人工干预,提升标定效率。
14、进一步的,所述获取最优标定参数组合包括:
15、将所述标定参数数列中的任一待标定参数作为待计算参数。
16、将所述待计算参数和车身数据输入至第一标定模块,以获取第一坐标集合。
17、以及,将所述待计算参数和位置数据输入至第二标定模块,以获取第二坐标集合。
18、在上述技术方案中,将待计算参数分别输入第一标定模块和第二标定模块,能够专注处理不同类型的数据(车身数据和位置数据),确保相关性最大化,减少数据交叉干扰;通过独立获得第一坐标集合和第二坐标集合,可以从多个维度分析待计算参数与车辆性能之间的关系,提高分析的全面性;将每个待计算参数单独输入到对应的标定模块,使得标定过程更为高效,减少不必要的计算,避免复杂度和计算时间的增加。
19、进一步的,所述获取最优标定参数组合包括:
20、基于所述第一坐标集合和第二坐标集合获取所述待计算参数在目标车辆数据内的多个相对误差,并根据各相对误差获取综合误差。
21、在上述技术方案中,通过获取多个相对误差,可以从多个方面全面分析待计算参数的性能和适配性,增强标定结果的可靠性;计算出的综合误差为后续标定参数的调整和优化提供了实证依据,促进基于数据做出的合理决策,提高标定效率。
22、进一步的,所述获取最优标定参数组合包括:
23、获取所述标定参数数列对应的多个综合误差,以获取最小的综合误差作为最优标定参数;以及,获取各类型的待标定参数对应的最优标定参数,以获取最优标定参数组合。
24、在上述技术方案中,通过获取各类型待标定参数的最优值,可以形成一个综合的最优标定参数组合,使得不同参数能够协调一致,从而优化整体系统性能。
25、进一步的,所述标定误差报告至少包括多个车辆状态下对应的标定误差;所述利用标定误差报告判断是否结束标定工作,包括:
26、基于所述标定误差报告判断各标定误差是否均在预设误差范围内,若是,则结束标定工作;否则根据所述标定误差报告获取标定错误报告,并发送至用户端。
27、在上述技术方案中,基于预设误差范围进行判断,确保所有标定误差均在允许范围内,从而保证标定工作的质量和稳定性,减少潜在安全隐患;若有标定误差超出范围,及时获取标定错误报告并发送至用户端,可以快速响应问题,避免长时间的无效标定工作,从而提高效率;将标定误差报告与错误报告分开处理,能够更清晰地识别问题所在,降低数据分析的复杂性,使技术人员能更快速解决问题。
28、此外,每次标定工作结束后,结合标定误差报告可以进行复盘分析,为后续的标定工作提供经验积累,有助于不断提高标定精度和效率。
29、基于同一构思,本技术还提供一种域控制器,所述域控制器至少包括:
30、计算模块,用于基于待标定参数将目标车辆数据加载至对应的标定模块,以获取最优标定参数组合,并将所述最优标定参数组合输入至预设应用算法。
31、报告输出模块,用于获取所述预设应用算法的运行结果,输出标定误差报告,以使得计算模块基于所述标定误差报告判断是否结束标定工作。
32、在上述技术方案中,所述域控制器通过集中化计算、自动化流程和实时反馈机制,能够显著提升标定工作效率、可靠性以及用户体验,为高级驾驶辅助系统提供强有力的支持。
33、所述计算模块还用于当根据所述标定误差报告获得的任一标定误差不在预设误差范围内时,基于所述标定误差报告输出标定错误报告至用户端。
34、在上述技术方案中,当任一标定误差超出预设范围时,系统能够迅速识别并做出反应,避免错误参数对车辆性能和安全性的潜在影响;技术团队可以根据标定错误报告进行深入分析,持续改进标定算法和流程,提高标定的准确性和效率。
35、基于同一构思,本技术还提供一种存储介质,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行所述的标定方法。
36、与现有技术相比,本技术的有益效果在于:
37、本技术需要预先采集目标车辆数据,并确定待标定参数;然后再基于所述待标定参数将所述目标车辆数据加载至对应的标定模块,以获取最优标定参数组合;再进一步将所述最优标定参数组合输入至预设应用算法中,以输出标定误差报告;以及,利用所述标定误差报告判断是否结束标定工作。
38、本技术通过可以确保标定是基于真实可靠的信息,从而提高后续应用时航迹推算的精确度,减小定位误差;并且可以灵活判断是否结束标定工作,确保在标定过程中用户可以及时得到反馈并及时调整,进一步提高标定的精确度。
- 还没有人留言评论。精彩留言会获得点赞!