一种筒形阀接力器的梯度调节同步控制方法与流程
本发明涉及筒形阀控制,特别是涉及一种筒形阀接力器的梯度调节同步控制方法。
背景技术:
1、筒形阀是水轮机的一种新型进水阀门,通常布置于水轮机的固定导叶和活动导叶之间,而筒形阀的开启、关闭等活动均由6个接力器控制。接力器的同步运动决定了筒形阀的开、关动作完成质量,是筒形阀同步控制的关键核心技术,当接力器同步误差增大时,容易造成卡阻、失步等故障报警,严重时会对机械结构造成不可逆的损伤,造成严重的安全隐患。
2、现有技术中,提出了公开号为cn115750191a,公开日为2023年03月07日的中国发明专利文件,该专利文献所公开的技术方案中,同步控制方法大致分为两种:速度调节控制和位置纠偏控制。
3、速度调节控制是通过对接力器的运动速度进行适时调整,从而实现同步误差动态清零的方法。这种控制方法需要频繁地触发运动控制功能块,使轨迹规划的浮点计算误差累计,可能会对运动精度造成影响。另外,在调速过程中速度稳定性差,加速度会频繁地发生突变,容易造成冲击。
4、位置纠偏控制是在原本运动过程中插入纠偏过程的控制方法,该方法会中止当前运动,导致运动流程不连贯。
5、为了实现同步控制,在其他技术领域,还提出了利用虚拟主轴以及pi控制进行主、从轴的同步控制方法。例如,公开号为cn115750191a,公开日为2020年04月14日的中国发明专利文件;公开号为cn118034190a,公开日为2024年05月14日的中国发明专利文件;公开号为cn110737193a,公开日为2019年09月19日的中国发明专利文件。
6、但是,当上述技术方案应用于筒形阀的同步控制时,由于筒形阀接力器与筒壁间存在摩擦,单纯的p、pi或pid等传统反馈控制方法无法完全消除主、从轴跟随误差,随着时间推移会形成稳态误差,控制精度很难满足筒形阀接力器的控制精度要求。
7、并且,筒形阀接力器控制的整体机械结构质量、体积都较为庞大,在对其进行同步控制时需要把握好调节力度,调节方法过于激进或者过于柔和都会造成同步误差过大,引起严重后果。
技术实现思路
1、为解决上述技术问题,本发明提出了一种筒形阀接力器的梯度调节同步控制方法,根据每周期反馈的各从轴间的位置差最大值,分为三个梯度分别采用不同的运动调节方法,该方法能够精确识别当前筒形阀运动状态,选择合适的调节策略,提高了控制的精度与灵活性。
2、本发明是通过采用下述技术方案实现的:
3、一种筒形阀接力器的梯度调节同步控制方法,包括以下步骤:
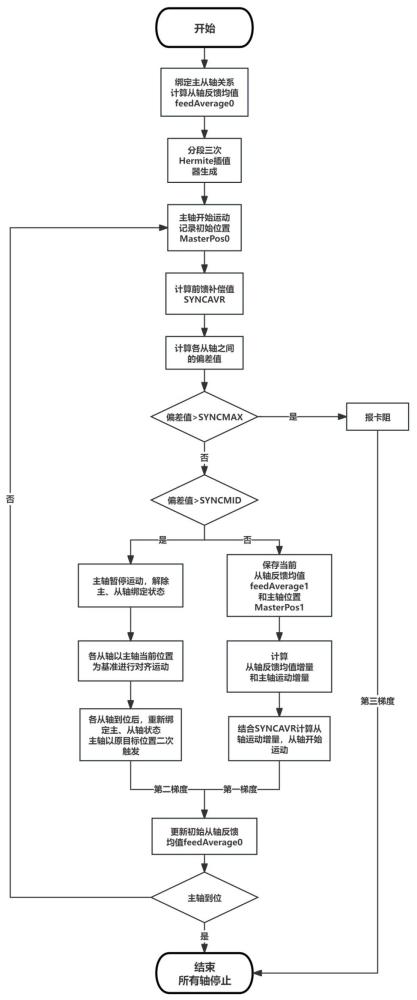
4、步骤s1.建立虚拟主轴,将多个接力器作为跟随主轴运动的从轴,绑定主从轴关系并计算初始从轴反馈均值;
5、步骤s2.生成前馈补偿值计算模型;
6、步骤s3.主轴开始运动并记录初始位置;
7、步骤s4.根据前馈补偿值计算模型以及当前主轴位置,计算下一周期的前馈补偿值;
8、步骤s5.计算各从轴之间的偏差值;
9、步骤s6.判断各从轴间偏差值是否超出syncmax,syncmax表示所允许的各从轴间偏差最大值;若所有从轴之间的偏差值均小于syncmax,则进入步骤s7,若存在任意两从轴间的偏差大于syncmax,则结束,所有轴停止;
10、步骤s7.判断各从轴间偏差值是否超出syncmid,syncmid表示可接受的各从轴间偏差常规值;若所有从轴之间的偏差值均小于syncmid,则采用第一梯度调节方法;若任意两从轴之间的偏差值大于syncmid,则采用第二梯度调节方法;
11、其中,所述第一梯度调节方法指:基于从轴反馈均值增量和主轴运动增量,采用比例反馈调节方法并结合前馈补偿值,计算从轴运动增量,并控制从轴按照计算出的运动增量进行运动;所述第二梯度调节方法指自主纠偏调节方法;
12、步骤s8.更新初始从轴反馈均值;
13、步骤s9.判断主轴是否到位,若否,则进入步骤s3,若是,则结束,所有轴停止。
14、所述前馈补偿值计算模型为分段三次hermite插值器,所述分段三次hermite插值器的生成方法为:
15、步骤s21.记录当前主轴位置masterpos;
16、步骤s22.主轴开始运动,按照无前馈调节的流程带动从轴进行运动;
17、步骤s23.本周期结束后,计算主、从轴的位置差,并与masterpos一一对应送入分段三次hermite插值器;
18、步骤s24.判断主轴行程是否结束,若主轴行程结束则退出或再次重复流程取平均,若行程未结束则进入下一周期。
19、步骤s6中,若存在任意两从轴间的偏差大于syncmax,则采用第三梯度调节方法进行调节,所述第三梯度调节方法具体包括:报卡组故障,手动调节。
20、所述第一梯度调节方法具体包括以下步骤:
21、步骤s711.保存当前从轴反馈均值feedaverage1和主轴位置masterpos1;
22、步骤s712.计算从轴反馈均值增量feedaveragedelta和主轴运动增量masterposdelta;
23、步骤s713.计算从轴运动增量slaveposdelta:
24、slaveposdelta=syncavr+feedaveragedelta*kp+masterposdelta
25、式中,syncavr为前馈补偿值,kp为比例增益系数;
26、步骤s714.控制从轴按照计算出的运动增量进行运动。
27、所述第二梯度调节方法具体包括以下步骤:
28、步骤s721.主轴暂停运动,解除主轴和从轴绑定状态;
29、步骤s722.各从轴以主轴当前位置为基准进行对齐运动;
30、步骤s723.各从轴到位后,重新绑定主轴和从轴状态,主轴以原目标位置二次触发。所述步骤s722具体包括:
31、以当前主轴位置为基准,计算从轴运动增量:
32、slaveposdelta[i]=masterpos-slavepos[i]
33、式中,slaveposdelta[i]表示从轴i运动增量,masterpos表示当前主轴位置,slavepos[i]表示从轴i当前位置;
34、各从轴分别运动,运动完成后,各从轴基本与主轴位置重合。
35、步骤s8具体指:将当前的初始从轴反馈均值feedaverage0与当前主轴运动增量masterposdelta作为下一周期的初始从轴反馈均值feedaverage0′:
36、feedaverage0′=feedaverage0+masterposdelta。
37、与现有技术相比,本发明的有益效果表现在:
38、1、本发明针对上述筒形阀接力器同步控制的难点,提出了一种筒形阀接力器的梯度调节同步控制方法。根据每周期反馈的各从轴间的位置差最大值,分为不同的梯度分别采用不同的运动调节方法,该方法能够精确识别当前筒形阀运动状态,选择合适的调节策略,提高了系统的控制精度与灵活性。
39、将多个筒形阀接力器作为从轴,并与虚拟主轴绑定,跟随主轴运动,多个从轴具有运动统一性,可以从根本上减少同步误差。虚轴作为主轴时,无实际物理结构,不受摩擦和机械情况影响,其给出的运动增量可信度高,偏差小。
40、其中,第一梯度时,调节方法主要针对调节从轴对主轴的跟随精度,跟随精度的提升能够保证整个系统的重复定位精度,一定程度上也可以提高筒形阀接力器的同步精度。具体的,每周期通过闭环比例反馈控制,对从轴下一周期的运动增量进行调节,减少了加速度突变带来的冲击,降低了各筒形阀接力器间的同步误差,提高了设备整体运行的流畅性。结合前馈补偿值计算模型,可以有效地减少从轴追逐主轴过程中形成的稳态误差,提高了从轴的跟随精度,增强了系统的鲁棒性。
41、第二梯度时,调节方法主要提高筒形阀接力器之间的同步精度,使从轴能够快速追赶主轴,实现在线纠偏,增强了控制的灵活性。
42、第三梯度时,属于异常情况,需要手动调节。
43、通过梯度调节方法,可以体现各从轴之间的同步精度,通过前馈补偿值,可以体现各从轴对主轴的跟随精度。通过上述方案的结合,使得本发明可以有效地提高筒形阀接力器的位置控制精度和同步精度,从而保证筒形阀接力器的精准运行。
44、2、本发明中,前馈补偿值计算模型为分段三次hermite插值器,可以随着主轴运动实时调整前馈补偿值,自适应能力更强,能够更大程度的提高前馈调节的性能,提高从轴的跟随精度。
- 还没有人留言评论。精彩留言会获得点赞!